A Python tool for 3D adaptive binary space partitioning and beyond

Project description



Introduction
abspy is a Python tool for 3D adaptive binary space partitioning and beyond: an ambient 3D space is adaptively partitioned to form a linear cell complex with pre-detected planar primitives in a point cloud, where an adjacency graph is dynamically obtained. The tool is implemented to support compact surface reconstruction initially, but can be extrapolated to other applications as well.
Key features
- Manipulation of planar primitives detected from point clouds
- Linear cell complex creation with adaptive binary space partitioning (a-BSP)
- Dynamic BSP-tree (NetworkX graph) updated locally upon insertion of primitives
- Support of polygonal surface reconstruction from graph cuts
- Compatible data structure with Easy3D on point clouds, primitives, cell complexes and surfaces
- Robust Boolean spatial operations underpinned by the rational ring from SageMath's exact kernel
Installation
Install requirements
All dependencies except for SageMath can be easily installed with PyPI:
git clone https://github.com/chenzhaiyu/abspy && cd abspy
pip install -r requirements.txt
Optionally, install trimesh and pyglet for benchmarking and visualisation, respectively:
pip install trimesh pyglet
Install SageMath
For Linux and macOS users, the easiest is to install from conda-forge:
conda config --add channels conda-forge
conda install sage
Alternatively, you can use mamba for faster parsing and package installation:
conda config --add channels conda-forge
conda install mamba
mamba install sage
For Windows users, you may have to build SageMath from source or install all other dependencies into a pre-built SageMath environment.
Install abspy
abspy itself can be found and easily installed via PyPI:
pip install abspy
Quick start
Here is an example of loading a point cloud in VertexGroup (.vg), partitioning the ambient space into candidate convexes, creating the adjacency graph, and extracting the outer surface of the object.
import numpy as np
from abspy import VertexGroup, AdjacencyGraph, CellComplex
# load a point cloud in VertexGroup
vertex_group = VertexGroup(filepath='points.vg')
# normalise the point cloud
vertex_group.normalise_to_centroid_and_scale()
# additional planes to append (e.g., the bounding planes)
additional_planes = [[0, 0, 1, -bounds[:, 0, 2].min()]]
# initialise CellComplex from planar primitives
cell_complex = CellComplex(vertex_group.planes, vertex_group.bounds, vertex_group.points_grouped, build_graph=True, additional_planes=additional_planes)
# refine planar primitives
cell_complex.refine_planes()
# prioritise certain planes (e.g., vertical ones)
cell_complex.prioritise_planes(prioritise_verticals=True)
# construct CellComplex
cell_complex.construct()
# print info on the cell complex
cell_complex.print_info()
# cells inside reference mesh
cells_in_mesh = cell_complex.cells_in_mesh('tests/test_data/test_mesh_manifold.obj')
# visualise the inside cells (only if pyglet installation is found and valid indices are provided)
if len(cells_in_mesh):
cell_complex.visualise(indices_cells=cells_in_mesh)
# build adjacency graph of the cell complex
adjacency_graph = AdjacencyGraph(cell_complex.graph)
# apply weights (e.g., SDF values provided by neural network prediction)
sdf_values = np.load('tests/test_data/test_sdf.npy')
volumes = cell_complex.volumes(multiplier=10e5)
weights_dict = adjacency_graph.to_dict(sigmoid(sdf_values * volumes))
# assign weights to n-links and st-links to the graph
adjacency_graph.assign_weights_to_n_links(cell_complex.cells, attribute='area_overlap', factor=0.001, cache_interfaces=True)
adjacency_graph.assign_weights_to_st_links(weights_dict)
# perform graph-cut to extract surface
_, _ = adjacency_graph.cut()
# save surface model to an OBJ file
adjacency_graph.save_surface_obj('surface.obj', engine='rendering')
Usage can be found at API reference. For the data structure of a .vg/.bvg file, please refer to VertexGroup.
Misc
- Why adaptive?
Adaptive space partitioning can significantly reduce computations for cell complex creation, compared to the exhaustive counterpart. The excessive number of cells from the latter not only hinders computation but also inclines to defective surfaces on subtle structures where inaccurate labels are more likely to be assigned.
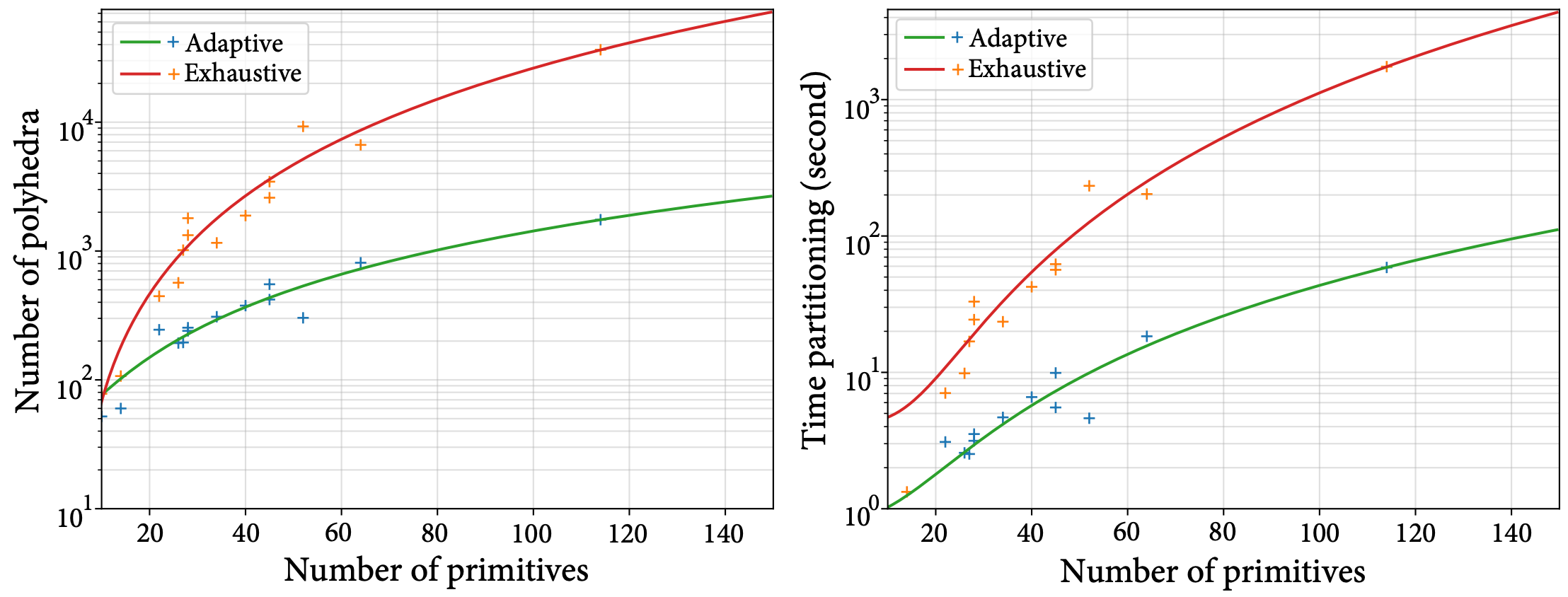
Run the benchmark on the number of candidate cells and runtime among adaptive partitioning, exhaustive partitioning, and SageMath's hyperplane arrangements:
python misc/benchmark.py
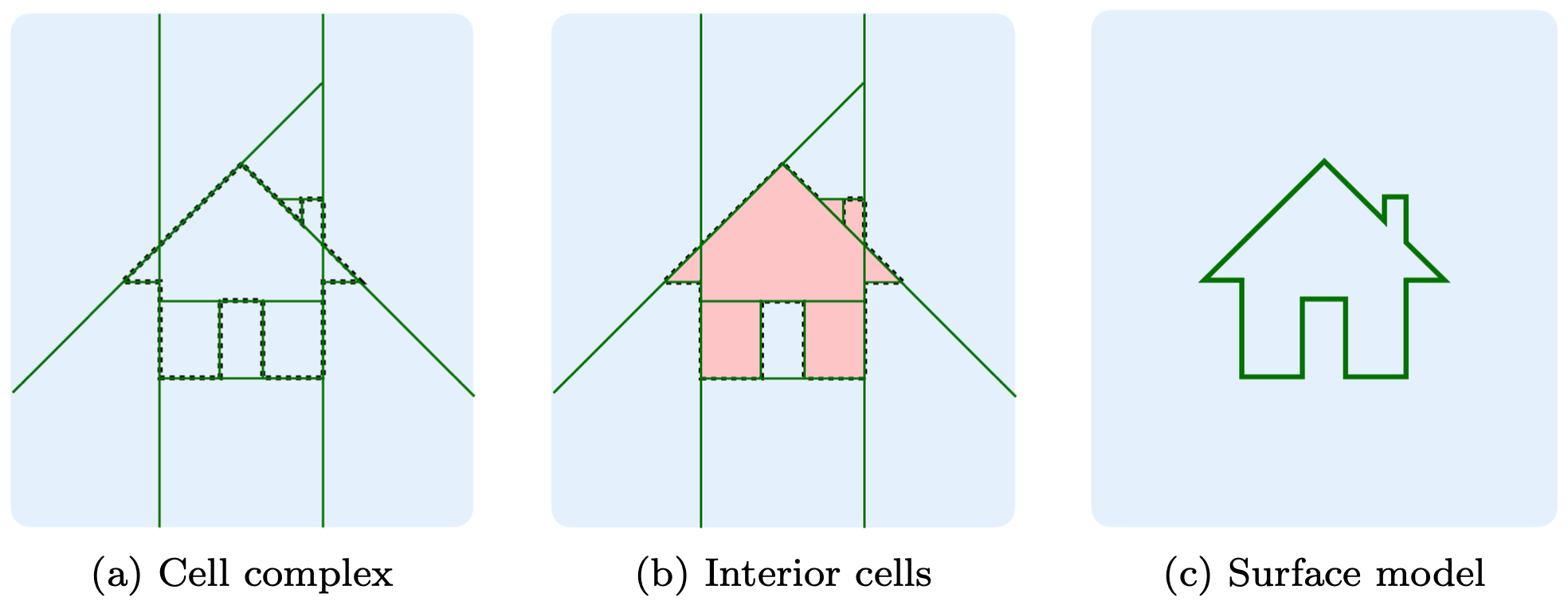
- How can abspy be used for surface reconstruction?
With the cell complex constructed and its adjacency maintained, surface reconstruction can be addressed by a graph cut solver that classifies each cell as being inside or outside the object. The surface exists in between adjacent cells where one is inside and the other is outside — exactly where the cut is performed. For more information, refer to Points2Poly that wraps abspy for building surface reconstruction.
License
Citation
If you use abspy in a scientific work, please consider citing the paper:
@article{chen2021reconstructing,
title={Reconstructing Compact Building Models from Point Clouds Using Deep Implicit Fields},
author={Chen, Zhaiyu and Khademi, Seyran and Ledoux, Hugo and Nan, Liangliang},
journal={arXiv preprint arXiv:2112.13142},
year={2021}
}
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file abspy-0.1.5.tar.gz.
File metadata
- Download URL: abspy-0.1.5.tar.gz
- Upload date:
- Size: 25.4 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.8.0 pkginfo/1.8.2 readme-renderer/32.0 requests/2.27.1 requests-toolbelt/0.9.1 urllib3/1.26.8 tqdm/4.58.0 importlib-metadata/4.11.1 keyring/23.5.0 rfc3986/2.0.0 colorama/0.4.4 CPython/3.8.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
055225747953be9479ed4e1751bf02eb11080afb13ab89af8a70670c76f27ffb
|
|
| MD5 |
6891872cf17b4432428d140d73e22531
|
|
| BLAKE2b-256 |
47e7922eb8c4b9a72a636d536609f0f2d6b23e95e7e4d685c2f38914401be2c8
|
File details
Details for the file abspy-0.1.5-py3-none-any.whl.
File metadata
- Download URL: abspy-0.1.5-py3-none-any.whl
- Upload date:
- Size: 23.1 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.8.0 pkginfo/1.8.2 readme-renderer/32.0 requests/2.27.1 requests-toolbelt/0.9.1 urllib3/1.26.8 tqdm/4.58.0 importlib-metadata/4.11.1 keyring/23.5.0 rfc3986/2.0.0 colorama/0.4.4 CPython/3.8.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
63d11ec658650e6ea6665968145f8bf6c7ecc144e75dde2b200cfab16ec2ec8a
|
|
| MD5 |
7e7ce4ddb358d9ef4819097c8c20d7b6
|
|
| BLAKE2b-256 |
c91636ee7d56c87cc94e5f0e97bc19022db806cb760f94d93db66a44897e8011
|







