A package for bayesian inference

Project description
Get Started
Install the package https://pypi.org/project/bayes-vi/ using pip:
pip install bayes-vi
Check out the documentation at https://maxgrtz.github.io/bayesian-inference/ !
Imports
import collections
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import arviz as az
# use ggplot styles for graphs
plt.style.use('ggplot')
import tensorflow as tf
import tensorflow_probability as tfp
tfd = tfp.distributions
tfb = tfp.bijectors
tfk = tf.keras
# set tf logger to log level ERROR to avoid warnings
tf.get_logger().setLevel('ERROR')
# import probabilistic models
from bayes_vi.model import Model
# import utils
from bayes_vi.utils import to_ordered_dict
from bayes_vi.utils.datasets import make_dataset_from_df
from bayes_vi.utils.symplectic_integrators import LeapfrogIntegrator
# mcmc imports
from bayes_vi.inference.mcmc import MCMC
from bayes_vi.inference.mcmc.transition_kernels import HamiltonianMonteCarlo, NoUTurnSampler, RandomWalkMetropolis
from bayes_vi.inference.mcmc.stepsize_adaptation_kernels import SimpleStepSizeAdaptation, DualAveragingStepSizeAdaptation
# vi imports
from bayes_vi.inference.vi import VI
from bayes_vi.inference.vi.surrogate_posteriors import ADVI, NormalizingFlow
from bayes_vi.inference.vi.flow_bijectors import HamiltonianFlow, AffineFlow, make_energy_fn, make_scale_fn, make_shift_fn
1. Example Workflow
A Bayesian modeling worklow using this package could look like this.
1.1. Create a Dataset
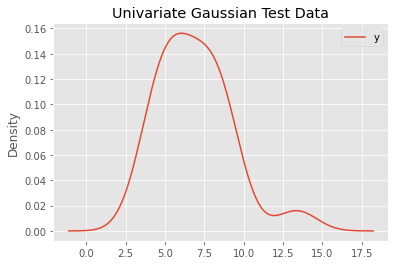
Create a tf.data.Dataset from your data. For this example consider some univariate Gaussian fake data.
num_datapoints = 20
loc = 7
scale = 3
true_dist = tfd.Normal(loc=loc, scale=scale)
y = true_dist.sample(num_datapoints)
The package provides a utility function make_dataset_from_df for easy construction of a dataset from a pd.DataFrame.
data = pd.DataFrame(dict(y=y))
dataset = make_dataset_from_df(data, target_names=['y'], format_features_as='dict')
ax = data.plot(kind='kde', title='Univariate Gaussian Test Data')
1.2. Define a Bayesian Model
To define a Bayesian Model, simply provide an collections.OrderedDict of prior distributions as tfp.distribution.Distirbutions and a likelihood function, which takes the parameters as inputs by name.
priors = collections.OrderedDict(
loc = tfd.Normal(loc=0., scale=10.),
scale = tfd.HalfNormal(scale=10.)
)
def likelihood(loc, scale):
return tfd.Normal(loc=loc, scale=scale)
model = Model(priors=priors, likelihood=likelihood)
It is possible to provide a list of constraining bijectors on construction of the model, which allows for computations on an unconstrained space.
If no such list is defined, default bijectors for each parameter are chosen.
1.3. Run Inference Algorithm of Choice
With this simple setup, you can now use either MCMC or variational inference to do Bayesian inference.
1.3.1. Run MCMC (e.g. with No-U-Turn Sampler with dual averaging stepsize adaptation)
Note that the transition kernel may have various additional parameters. Here we use just the defaults and only provide the stepsize adaptation kernel.
NUM_CHAINS = 2
NUM_SAMPLES = 4000
NUM_BURNIN_STEPS = 1000
stepsize_adaptation_kernel = DualAveragingStepSizeAdaptation(num_adaptation_steps=int(NUM_BURNIN_STEPS*0.8))
kernel = NoUTurnSampler(stepsize_adaptation_kernel=stepsize_adaptation_kernel)
mcmc = MCMC(model=model, dataset=dataset, transition_kernel=kernel)
mcmc_result = mcmc.fit(
num_chains=NUM_CHAINS,
num_samples=NUM_SAMPLES,
num_burnin_steps=NUM_BURNIN_STEPS,
progress_bar=True,
)
The mcmc_result is a wrapper containing the sample results mcmc_result.samples and additional traced metrics specific to the kernel mcmc_result.trace.
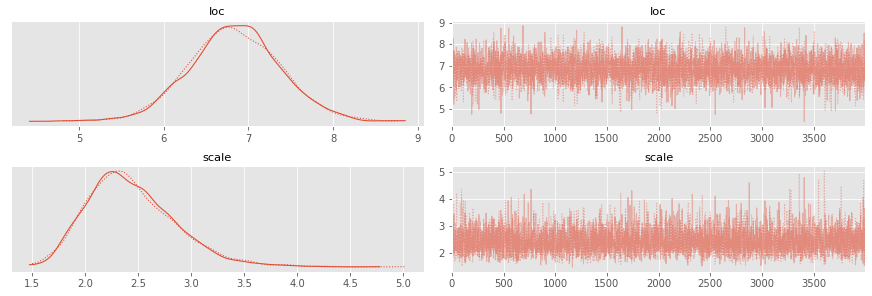
To visualize the results, one can use existing libraries like arviz (https://arviz-devs.github.io/arviz/index.html).
Later versions of this package should allow for a seamless integration with arviz, but for now we have to reformat the sample results to conform to arviz conventions.
# adapt sample results to arviz required format --- later versions should allow for seamless integration with arviz
posterior_samples = to_ordered_dict(model.param_names, tf.nest.map_structure(lambda v: v.numpy().T, mcmc_result.samples))
az.summary(posterior_samples)
| mean | sd | hdi_3% | hdi_97% | mcse_mean | mcse_sd | ess_mean | ess_sd | ess_bulk | ess_tail | r_hat | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| loc | 6.837 | 0.546 | 5.818 | 7.853 | 0.008 | 0.005 | 5210.0 | 5210.0 | 5240.0 | 4550.0 | 1.0 |
| scale | 2.444 | 0.426 | 1.708 | 3.216 | 0.006 | 0.005 | 4639.0 | 4273.0 | 5315.0 | 4424.0 | 1.0 |
ax = az.plot_trace(posterior_samples)
1.3.2. Run Variational Inference (e.g. meanfield ADVI)
Instead of MCMC methods, we might want to use variational inference.
Choose a surrogate posterior, e.g. meanfield ADVI, a discrepancy function from tfp.vi, e.g. tfp.vi.kl_reverse , and select some optimization parameters (number of optimzation steps, sample size to approximate variational loss, optimizer, learning rate).
NUM_STEPS = 1000
SAMPLE_SIZE = 10
LEARNING_RATE = 1e-2
surrogate_posterior = ADVI(model=model, mean_field=True)
vi = VI(model=model, dataset=dataset, surrogate_posterior=surrogate_posterior, discrepancy_fn=tfp.vi.kl_reverse)
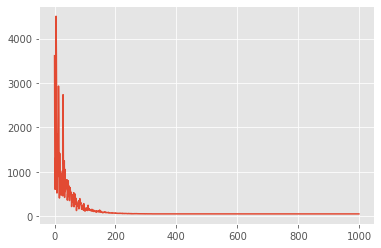
approx_posterior, meanfield_advi_losses = vi.fit(
optimizer=tf.optimizers.Adam(learning_rate=LEARNING_RATE),
num_steps=NUM_STEPS,
sample_size=SAMPLE_SIZE,
progress_bar=True
)
ax = plt.plot(meanfield_advi_losses)
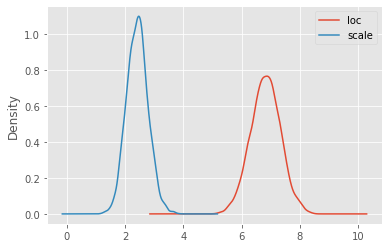
df = pd.DataFrame(approx_posterior.sample(5000))
df.describe(percentiles=[0.03, 0.5, 0.97]).T
| count | mean | std | min | 3% | 50% | 97% | max | |
|---|---|---|---|---|---|---|---|---|
| loc | 5000.0 | 6.819653 | 0.511264 | 4.710279 | 5.844515 | 6.825340 | 7.793183 | 8.429766 |
| scale | 5000.0 | 2.420403 | 0.367414 | 1.174533 | 1.760495 | 2.421083 | 3.117724 | 3.836521 |
ax = df.plot(kind='kde')
2. Normalizing Flows for Variational Inference
Continuing the simple example above, this is how you can flexibly define surrogate posteriors based on Normalizing flows for variational Bayesian inference.
By default, the base distribution is a standard diagonal Gaussian.
This example uses the predefined trainable AffineFlow bijector, but any parameterized tfp.bijectors.Bijector can be used. Just define your own!
You can construct more expressive flows by making use of the tfp.bijectors.Chain bijector to define compositions of flows.
ndims = model.flat_unconstrained_param_event_ndims # this is the number of dimensions of the unconstrained parameter space
2.1. Affine Flows
flow_bijector = AffineFlow(ndims)
surrogate_posterior = NormalizingFlow(model=model, flow_bijector=flow_bijector)
vi = VI(model=model, dataset=dataset, surrogate_posterior=surrogate_posterior, discrepancy_fn=tfp.vi.kl_reverse)
approx_posterior, affine_flow_losses = vi.fit(
optimizer=tf.optimizers.Adam(learning_rate=LEARNING_RATE),
num_steps=NUM_STEPS,
sample_size=SAMPLE_SIZE,
progress_bar=True
)
2.2. Continuous Flows
To define continuous normalizing flows, you may use is the tfp.bijectors.FFJORD bijector.
def get_continuous_flow_bijector(unconstrained_event_dims):
state_fn = tfk.Sequential()
state_fn.add(tfk.layers.Dense(64, activation=tfk.activations.tanh))
state_fn.add(tfk.layers.Dense(unconstrained_event_dims))
state_fn.build((None, unconstrained_event_dims+1))
state_time_derivative_fn = lambda t, state: state_fn(tf.concat([tf.fill((state.shape[0],1), t), state], axis=-1))
return tfb.FFJORD(state_time_derivative_fn,
ode_solve_fn=tfp.math.ode.DormandPrince(first_step_size=0.1).solve,
trace_augmentation_fn=tfb.ffjord.trace_jacobian_hutchinson)
flow_bijector = get_continuous_flow_bijector(ndims)
surrogate_posterior = NormalizingFlow(model=model, flow_bijector=flow_bijector)
vi = VI(model=model, dataset=dataset, surrogate_posterior=surrogate_posterior, discrepancy_fn=tfp.vi.kl_reverse)
approx_posterior, cnf_losses = vi.fit(
optimizer=tf.optimizers.Adam(learning_rate=LEARNING_RATE),
num_steps=NUM_STEPS,
sample_size=SAMPLE_SIZE,
progress_bar=True
)
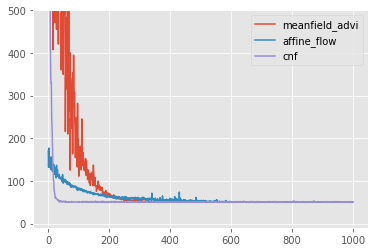
2.3. Comparison
Have a look at the optimzation behaviors in comparison.
ax = pd.DataFrame({'meanfield_advi': meanfield_advi_losses, 'affine_flow': affine_flow_losses, 'cnf': cnf_losses}).plot(ylim=(-10,500))
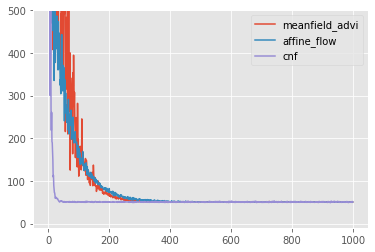
3. Augmented Normalizing Flows for Variational Inference
The package allows to easily define augmented normalizing flows. This obviously has no advantages for such a simple example model.
Simply choose a number of extra dimensions extra_ndims and define the flow bijector on the augmented space, i.e. on dimensions ndims + extra_ndims.
The optimization problem is solved on the augmented space by lifting the target distribution with the conditional posterior_lift_distribution, which by default is simply lambda _: tfd.MultivariateNormalDiag(loc=tf.zeros(extra_ndims), scale_diag=tf.ones(extra_ndims)).
ndims = model.flat_unconstrained_param_event_ndims # this is the number of dimensions of the unconstrained parameter space
extra_ndims = 2 # dimensions of the augmentation space
flow_bijector = AffineFlow(ndims + extra_ndims)
surrogate_posterior = NormalizingFlow(model=model, flow_bijector=flow_bijector, extra_ndims=extra_ndims)
vi = VI(model=model, dataset=dataset, surrogate_posterior=surrogate_posterior, discrepancy_fn=tfp.vi.kl_reverse)
approx_posterior, affine_flow_losses = vi.fit(
optimizer=tf.optimizers.Adam(learning_rate=LEARNING_RATE),
num_steps=NUM_STEPS,
sample_size=SAMPLE_SIZE,
progress_bar=True
)
def get_continuous_flow_bijector(unconstrained_event_dims):
state_fn = tfk.Sequential()
state_fn.add(tfk.layers.Dense(64, activation=tfk.activations.tanh))
state_fn.add(tfk.layers.Dense(unconstrained_event_dims))
state_fn.build((None, unconstrained_event_dims+1))
state_time_derivative_fn = lambda t, state: state_fn(tf.concat([tf.fill((state.shape[0],1), t), state], axis=-1))
return tfb.FFJORD(state_time_derivative_fn,
ode_solve_fn=tfp.math.ode.DormandPrince(first_step_size=0.1).solve,
trace_augmentation_fn=tfb.ffjord.trace_jacobian_hutchinson)
flow_bijector = get_continuous_flow_bijector(ndims + extra_ndims)
surrogate_posterior = NormalizingFlow(model=model, flow_bijector=flow_bijector, extra_ndims=extra_ndims)
vi = VI(model=model, dataset=dataset, surrogate_posterior=surrogate_posterior, discrepancy_fn=tfp.vi.kl_reverse)
approx_posterior, cnf_losses = vi.fit(
optimizer=tf.optimizers.Adam(learning_rate=LEARNING_RATE),
num_steps=NUM_STEPS,
sample_size=SAMPLE_SIZE,
progress_bar=True
)
ax = pd.DataFrame({'meanfield_advi': meanfield_advi_losses, 'affine_flow': affine_flow_losses, 'cnf': cnf_losses}).plot(ylim=(-10,500))
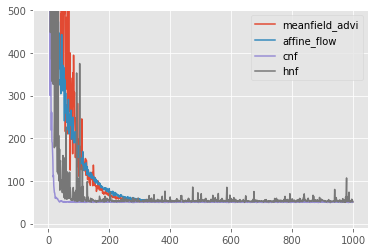
4. Hamiltonian Normalizing Flows
As another example consider Hamiltonian Normalizing Flows (HNF) as motivated by Toth, P., Rezende, D. J., Jaegle, A., Racanière, S., Botev, A., & Higgins, I. (2019). Hamiltonian Generative Networks. ArXiv. http://arxiv.org/abs/1909.13789 .
HNFs are based on defining augmented flows as the Hamiltonian dynamics of a family of Hamiltonian systems.
To compute such dynamics, we use the symplectic leapfrog integrator.
The package provides an implementation of a general Hamiltonian Flow bijector.
4.1. Verify Hamiltonian Flow Bijector
To test the implementation the Hamiltonian Flow Bijector, consider the Hamiltonian of a 1d harmonic oscillator with mass m=1 and constant k=1:
H(q,p) = T(p) + U(q) = 0.5 p^2 + 0.5 q^2.
We know that this should yield an oscillating dynamic, which manifests as a circle on phase space.
T = lambda p: 0.5*p**2
U = lambda q: 0.5*q**2
# event dims can be ignored in this example, because they are only used to construct trainable default energy function if none are provided explicitly
hamiltonian_flow = HamiltonianFlow(
event_dims=1,
potential_energy_fn=U,
kinetic_energy_fn=T,
symplectic_integrator=LeapfrogIntegrator(),
step_sizes=0.5,
num_integration_steps=1
)
initial_state = tf.constant([1.0, 0.0])
path = [initial_state.numpy()]
for _ in range(20):
path.append(hamiltonian_flow.forward(path[-1]).numpy())
path = np.stack(path)
fig, [ax1, ax2] = plt.subplots(1,2, figsize=(6,3))
ax1.plot(path[:, 0])
ax1.set_title('configuration plot')
ax2.plot(path[:,0], path[:,1])
ax2.set_title('phase space plot')
plt.tight_layout()

4.2. Hamiltonian Normalizing Flows
In the case of HNFs the augmentation space has the same dimension as the parameter space.
ndims = model.flat_unconstrained_param_event_ndims # this is the number of dimensions of the unconstrained parameter space
extra_ndims = ndims # dimensions of the augmentation space
For simplicity, we use the default MLP based potential and kinetic energy functions.
flow_bijector = HamiltonianFlow(ndims, step_sizes=tf.Variable(0.1), num_integration_steps=2)
surrogate_posterior = NormalizingFlow(model=model, flow_bijector=flow_bijector, extra_ndims=extra_ndims)
vi = VI(model=model, dataset=dataset, surrogate_posterior=surrogate_posterior, discrepancy_fn=tfp.vi.kl_reverse)
approx_posterior, hnf_losses = vi.fit(
optimizer=tf.optimizers.Adam(learning_rate=LEARNING_RATE),
num_steps=NUM_STEPS,
sample_size=SAMPLE_SIZE,
progress_bar=True
)
ax = pd.DataFrame({'meanfield_advi': meanfield_advi_losses, 'affine_flow': affine_flow_losses, 'cnf': cnf_losses, 'hnf': hnf_losses}).plot(ylim=(-10,500))
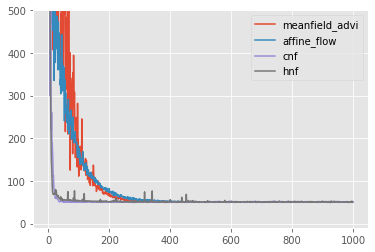
An interesting observation is that HNFs become more stable and perform better, if the base distribution is trainable.
This compensates for the problem, that volume preserving flows like HNFs can only permute the densities of the base distribution.
flow_bijector = HamiltonianFlow(ndims, step_sizes=tf.Variable(0.1), num_integration_steps=2)
base_distribution = tfd.MultivariateNormalDiag(loc=tf.Variable([0.0]*2*ndims), scale_diag=tf.Variable([0.1]*2*ndims))
surrogate_posterior = NormalizingFlow(model=model, flow_bijector=flow_bijector, base_distribution=base_distribution, extra_ndims=extra_ndims)
vi = VI(model=model, dataset=dataset, surrogate_posterior=surrogate_posterior, discrepancy_fn=tfp.vi.kl_reverse)
approx_posterior, hnf_losses = vi.fit(
optimizer=tf.optimizers.Adam(learning_rate=LEARNING_RATE),
num_steps=NUM_STEPS,
sample_size=SAMPLE_SIZE,
progress_bar=True
)
ax = pd.DataFrame({'meanfield_advi': meanfield_advi_losses, 'affine_flow': affine_flow_losses, 'cnf': cnf_losses, 'hnf': hnf_losses}).plot(ylim=(-10,500))
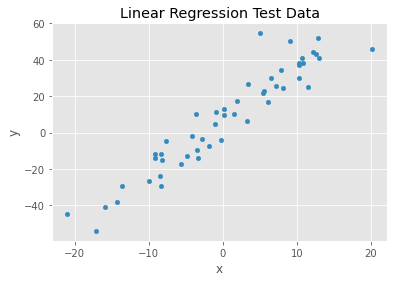
5. Regression Model Example
As a final example, this is how to define regression models.
5.1. Create a Dataset
Again, create a tf.data.Dataset from your data or, in this case, generate some fake dataset.
num_datapoints = 50
beta0 = 7
beta1 = 3
scale = 10
x = tf.random.normal((num_datapoints,), mean=0.0, stddev=10.0)
true_dist = tfd.Normal(loc=beta0 + x*beta1, scale=scale)
y = true_dist.sample()
data = pd.DataFrame(dict(x=x, y=y))
dataset = make_dataset_from_df(data, target_names=['y'], feature_names=['x'], format_features_as='dict')
ax = data.plot(x='x', y='y', kind='scatter', title='Linear Regression Test Data')
1.2. Define a Bayesian Model
To define the Model, again provide an collections.OrderedDict of prior distributions as tfp.distribution.Distirbutions and a likelihood function, which takes the parameters and the features as inputs.
# define priors
priors = collections.OrderedDict(
beta_0 = tfd.Normal(loc=0., scale=10.),
beta_1 = tfd.Normal(loc=0., scale=10.),
scale = tfd.HalfNormal(scale=10.),
)
# define likelihood
def likelihood(beta_0, beta_1, scale, features):
linear_response = beta_0 + beta_1*features['x']
return tfd.Normal(loc=linear_response, scale=scale)
model = Model(priors=priors, likelihood=likelihood)
1.3. Run Inference Algorithm of Choice
You can now again use either MCMC or variational inference to do Bayesian inference.
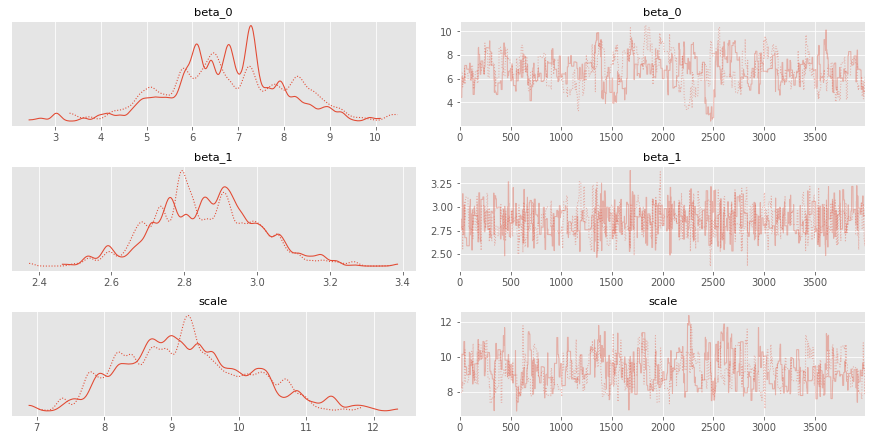
1.3.1. Run MCMC (e.g. with Random Walk Metropolis kernel)
NUM_CHAINS = 2
NUM_SAMPLES = 4000
NUM_BURNIN_STEPS = 1000
kernel = RandomWalkMetropolis()
mcmc = MCMC(model=model, dataset=dataset, transition_kernel=kernel)
mcmc_result = mcmc.fit(
num_chains=NUM_CHAINS,
num_samples=NUM_SAMPLES,
num_burnin_steps=NUM_BURNIN_STEPS,
progress_bar=True,
)
# adapt sample results to arviz required format --- later versions should allow for seamless integration with arviz
posterior_samples = to_ordered_dict(model.param_names, tf.nest.map_structure(lambda v: v.numpy().T, mcmc_result.samples))
az.summary(posterior_samples)
| mean | sd | hdi_3% | hdi_97% | mcse_mean | mcse_sd | ess_mean | ess_sd | ess_bulk | ess_tail | r_hat | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| beta_0 | 6.744 | 1.296 | 4.561 | 9.264 | 0.124 | 0.088 | 109.0 | 109.0 | 110.0 | 146.0 | 1.01 |
| beta_1 | 2.859 | 0.144 | 2.570 | 3.110 | 0.006 | 0.004 | 596.0 | 591.0 | 600.0 | 689.0 | 1.00 |
| scale | 9.217 | 0.924 | 7.724 | 10.978 | 0.063 | 0.045 | 215.0 | 214.0 | 220.0 | 395.0 | 1.01 |
ax = az.plot_trace(posterior_samples)
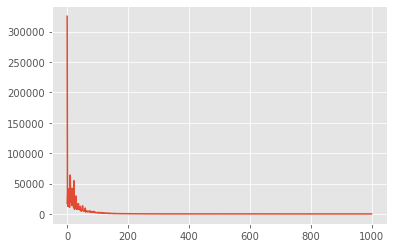
1.3.2. Run Variational Inference (e.g. full rank ADVI)
NUM_STEPS = 1000
SAMPLE_SIZE = 10
LEARNING_RATE = 1e-2
surrogate_posterior = ADVI(model=model)
vi = VI(model=model, dataset=dataset, surrogate_posterior=surrogate_posterior, discrepancy_fn=tfp.vi.kl_reverse)
approx_posterior, meanfield_advi_losses = vi.fit(
optimizer=tf.optimizers.Adam(learning_rate=LEARNING_RATE),
num_steps=NUM_STEPS,
sample_size=SAMPLE_SIZE,
progress_bar=True
)
ax = plt.plot(meanfield_advi_losses)
df = pd.DataFrame(approx_posterior.sample(5000))
df.describe(percentiles=[0.03, 0.5, 0.97]).T
| count | mean | std | min | 3% | 50% | 97% | max | |
|---|---|---|---|---|---|---|---|---|
| beta_0 | 5000.0 | 6.877542 | 1.259172 | 2.323422 | 4.499239 | 6.854323 | 9.263641 | 11.693712 |
| beta_1 | 5000.0 | 2.863648 | 0.136708 | 2.382410 | 2.609725 | 2.861714 | 3.120923 | 3.358475 |
| scale | 5000.0 | 9.005477 | 0.870540 | 5.714116 | 7.380205 | 8.992948 | 10.633552 | 12.097922 |
ax = df.plot(kind='kde')

Release history Release notifications | RSS feed

Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file bayes-vi-0.3.0.tar.gz.
File metadata
- Download URL: bayes-vi-0.3.0.tar.gz
- Upload date:
- Size: 26.3 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.3.0 pkginfo/1.7.0 requests/2.25.1 setuptools/52.0.0.post20210125 requests-toolbelt/0.9.1 tqdm/4.59.0 CPython/3.6.13
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
9c6b14e707e738e89728024a39052c840b4a5665c63bb21cfd1c89b0a7fca3ea
|
|
| MD5 |
eea8d3e97fdc9f428f40f5eacdd17906
|
|
| BLAKE2b-256 |
21091c444563255faad0f3a1f3ecb0df378f2f5a5cfb2a07bbc107f4460622f3
|
File details
Details for the file bayes_vi-0.3.0-py3-none-any.whl.
File metadata
- Download URL: bayes_vi-0.3.0-py3-none-any.whl
- Upload date:
- Size: 43.2 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.3.0 pkginfo/1.7.0 requests/2.25.1 setuptools/52.0.0.post20210125 requests-toolbelt/0.9.1 tqdm/4.59.0 CPython/3.6.13
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
2d7a6333fb6973cc5268f0b94432d6882cc4e67a83a9e2fc73e34371e2b20522
|
|
| MD5 |
e804b95d1d1749d48a6fd07ca4582a94
|
|
| BLAKE2b-256 |
a73626a9e5b54e355572445f798d0c80629ac920c440df9f5acf2e3f2cc8548d
|







