Learning Discrete World Models for Heuristic Search
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers

Project description
DeepCubeAI
This repository contains code for the paper Learning Discrete World Models for Heuristic Search.
 |
 |
 |
 |
|---|
About DeepCubeAI
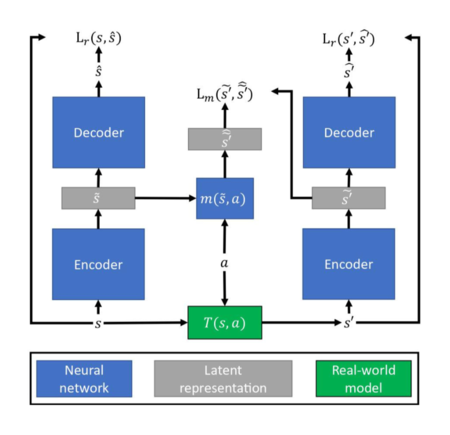
DeepCubeAI is an algorithm that learns a discrete world model and employs Deep Reinforcement Learning methods to learn a heuristic function that generalizes over start and goal states. We then integrate the learned model and the learned heuristic function with heuristic search, such as Q* search, to solve sequential decision making problems. For more details, please refer to the paper.
Quick links
- Key contributions: Key Contributions
- Main results: Main Results
- Quick start: Quick start
- Install: docs/installation.md
- CLI reference: docs/cli.md
- Stage-by-stage usage (all flags and paths): docs/usage.md
- Reproduce the paper results: docs/reproduce.md
- SLURM and Distributed training: docs/qlearning_distributed.md
- Environments and integration: docs/environments.md
- Python usage (API snippets): docs/python_api.md
- Citing the paper: Citation
- Contact: Contact
Key Contributions
Overview
DeepCubeAI is comprised of three key components:
-
Discrete World Model
- Learns a world model that represents states in a discrete latent space.
- This approach tackles two challenges: model degradation and state re-identification.
- Prediction errors less than 0.5 are corrected by rounding.
- Re-identifies states by comparing two binary vectors.
-
Generalizable Heuristic Function
- Utilizes Deep Q-Network (DQN) and hindsight experience replay (HER) to learn a heuristic function that generalizes over start and goal states.
-
Optimized Search
- Integrates the learned model and the learned heuristic function with heuristic search to solve problems. It uses Q* search, a variant of A* search optimized for DQNs, which enables faster and more memory-efficient planning.
Main Results
- Accurate reconstruction of ground truth images after thousands of timesteps.
- Achieved 100% success on Rubik's Cube (canonical goal), Sokoban, IceSlider, and DigitJump.
- 99.9% success on Rubik's Cube with reversed start/goal states.
- Demonstrated significant improvement in solving complex planning problems and generalizing to unseen goals.
Quick start
DeepCubeAI provides a Python package and CLI. You can install it from PyPI or build it from source. The package supports Python 3.10-3.12.
[!NOTE]
You can find detailed installation instructions, including using Conda for environment management, in the installation guide.
Install deepcubeai Package from PyPI with uv (Recommended if Running as a Package)
deepcubeai is available on PyPI and you can use the following commands to install it.
-
Install
uvfrom the official website: Install uv. -
Create and activate a virtual environment:
# create a .venv in the current folder uv venv # macOS & Linux source .venv/bin/activate # Windows (PowerShell) .venv\Scripts\activate
If you have multiple Python versions, ensure you use a supported one (3.10-3.12), e.g.:
uv venv --python 3.12
-
Install the package (using uv’s pip interface):
uv pip install deepcubeai
Install from Source with Pixi (Recommended if Working from Source)
Pixi is a package management tool that provides fast, reproducible environments with support for Conda and PyPI dependencies. The pixi.toml and pixi.lock files define reproducible environments with exact dependency versions.
-
Install Pixi: Follow the official installation guide
-
Clone repository:
git clone https://github.com/misaghsoltani/DeepCubeAI.git cd DeepCubeAI
-
Enter the default environment (first run performs dependency resolution):
pixi shell # or: pixi shell -e default # or pixi install -e default # non-interactive solve only
Running DeepCubeAI
For running the CLI use the following command to see the available options:
# If already entered the environment with Pixi:
deepcubeai --help # or -h
# or
# Without entering the environment:
pixi run deepcubeai --help # or -h
Or use it as a Python package:
import deepcubeai
print(deepcubeai.__version__)
License
MIT License - see LICENSE.
Citation
If you use DeepCubeAI in your research, please cite:
@article{agostinelli2025learning,
title={Learning Discrete World Models for Heuristic Search},
author={Agostinelli, Forest and Soltani, Misagh},
journal={Reinforcement Learning Journal},
volume={4},
pages={1781--1792},
year={2025}
}
Contact
If you have any questions or issues, please contact Misagh Soltani (msoltani@email.sc.edu)
Project details
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file deepcubeai-0.2.1.tar.gz.
File metadata
- Download URL: deepcubeai-0.2.1.tar.gz
- Upload date:
- Size: 15.6 MB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
04c3b0a202d22b5e88ab274bf4845a475d0d73627fbdae25179f10b2fea365b3
|
|
| MD5 |
a6a2a1035feb34c70a7576b3b88a22d8
|
|
| BLAKE2b-256 |
47e1bd2857b0512ca1d22c1438f98ba020d03bf54b1bc6a24639601e0c5920d4
|
Provenance
The following attestation bundles were made for deepcubeai-0.2.1.tar.gz:
Publisher:
publish_to_pypi.yml on misaghsoltani/DeepCubeAI
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
deepcubeai-0.2.1.tar.gz -
Subject digest:
04c3b0a202d22b5e88ab274bf4845a475d0d73627fbdae25179f10b2fea365b3 - Sigstore transparency entry: 441421897
- Sigstore integration time:
-
Permalink:
misaghsoltani/DeepCubeAI@48a88e23fd3cfb9858552021e02545e1583aa044 -
Branch / Tag:
refs/tags/v0.2.1 - Owner: https://github.com/misaghsoltani
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish_to_pypi.yml@48a88e23fd3cfb9858552021e02545e1583aa044 -
Trigger Event:
push
-
Statement type:
File details
Details for the file deepcubeai-0.2.1-py3-none-any.whl.
File metadata
- Download URL: deepcubeai-0.2.1-py3-none-any.whl
- Upload date:
- Size: 15.6 MB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
9e9a7ce60264757af4f9e0ee0a71c364137a647af84b104d49bfb82a5f2482d1
|
|
| MD5 |
bfbac757b53d70b3e61a2b5be55243d8
|
|
| BLAKE2b-256 |
18a8679b84ec4f8e31a872623ac2dd4f013750652ac59f7926362019c128fc2a
|
Provenance
The following attestation bundles were made for deepcubeai-0.2.1-py3-none-any.whl:
Publisher:
publish_to_pypi.yml on misaghsoltani/DeepCubeAI
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
deepcubeai-0.2.1-py3-none-any.whl -
Subject digest:
9e9a7ce60264757af4f9e0ee0a71c364137a647af84b104d49bfb82a5f2482d1 - Sigstore transparency entry: 441421959
- Sigstore integration time:
-
Permalink:
misaghsoltani/DeepCubeAI@48a88e23fd3cfb9858552021e02545e1583aa044 -
Branch / Tag:
refs/tags/v0.2.1 - Owner: https://github.com/misaghsoltani
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish_to_pypi.yml@48a88e23fd3cfb9858552021e02545e1583aa044 -
Trigger Event:
push
-
Statement type:







