E(2)-Equivariant CNNs Library for PyTorch

Project description
General E(2)-Equivariant Steerable CNNs
Documentation | Experiments | Paper | Thesis | new escnn library
Check out our new escnn library which extends e2cnn to a wider class of equivariance groups.
While we will still provide some support for this older version, this library is deprecated and we plan to slowly abandon it in favour of the newer version escnn. Note that escnn already includes all features of e2cnn and many more. You can find a short summary of the main differences in the new version here.
e2cnn is a PyTorch extension for equivariant deep learning.
Equivariant neural networks guarantee a specified transformation behavior of their feature spaces under transformations of their input.
For instance, classical convolutional neural networks (CNNs) are by design equivariant to translations of their input.
This means that a translation of an image leads to a corresponding translation of the network's feature maps.
This package provides implementations of neural network modules which are equivariant under all isometries E(2) of the image plane

The feature spaces of E(2)-Equivariant Steerable CNNs are defined as spaces of feature fields, being characterized by their transformation law under rotations and reflections. Typical examples are scalar fields (e.g. gray-scale images or temperature fields) or vector fields (e.g. optical flow or electromagnetic fields).
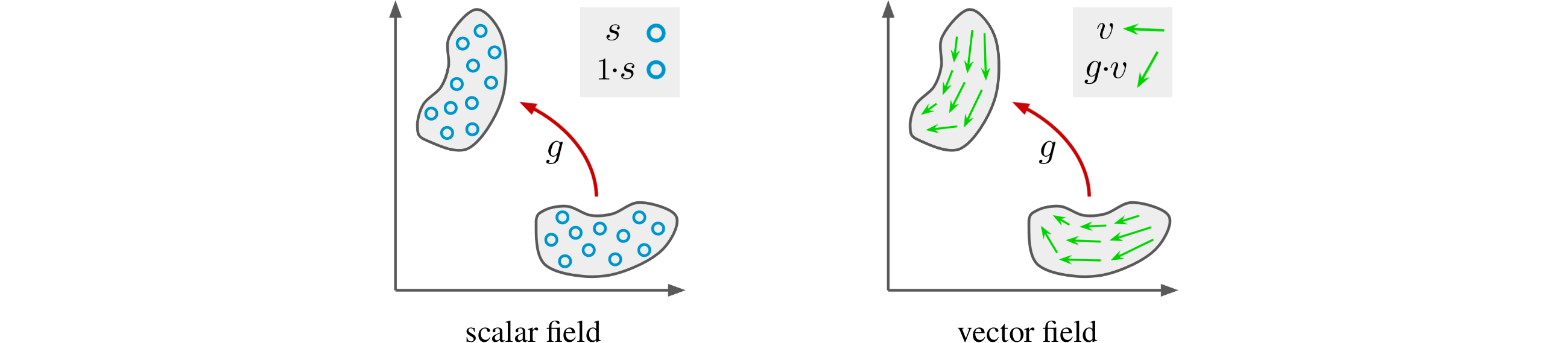
Instead of a number of channels, the user has to specify the field types and their multiplicities in order to define a feature space.
Given a specified input- and output feature space, our R2conv module instantiates the most general convolutional mapping between them.
Our library provides many other equivariant operations to process feature fields, including nonlinearities, mappings to produce invariant features, batch normalization and dropout.
Feature fields are represented by GeometricTensor objects, which wrap a torch.Tensor with the corresponding transformation law.
All equivariant operations perform a dynamic type-checking in order to guarantee a geometrically sound processing of the feature fields.
E(2)-Equivariant Steerable CNNs unify and generalize a wide range of isometry equivariant CNNs in one single framework. Examples include:
- Group Equivariant Convolutional Networks
- Harmonic Networks: Deep Translation and Rotation Equivariance
- Steerable CNNs
- Rotation equivariant vector field networks
- Learning Steerable Filters for Rotation Equivariant CNNs
- HexaConv
- Roto-Translation Covariant Convolutional Networks for Medical Image Analysis
For more details we refer to our NeurIPS 2019 paper General E(2)-Equivariant Steerable CNNs.
The library also supports equivariant Steerable partial differential operators as described in Steerable Partial Differential Operators for Equivariant Neural Networks.
The library is structured into four subpackages with different high-level features:
| Component | Description |
|---|---|
| e2cnn.group | implements basic concepts of group and representation theory |
| e2cnn.kernels | solves for spaces of equivariant convolution kernels |
| e2cnn.diffops | solves for spaces of equivariant differential operators |
| e2cnn.gspaces | defines the image plane and its symmetries |
| e2cnn.nn | contains equivariant modules to build deep neural networks |
Demo
Since E(2)-steerable CNNs are equivariant under rotations and reflections, their inference is independent from the choice of image orientation. The visualization below demonstrates this claim by feeding rotated images into a randomly initialized E(2)-steerable CNN (left). The middle plot shows the equivariant transformation of a feature space, consisting of one scalar field (color-coded) and one vector field (arrows), after a few layers. In the right plot we transform the feature space into a comoving reference frame by rotating the response fields back (stabilized view).
The invariance of the features in the comoving frame validates the rotational equivariance of E(2)-steerable CNNs empirically. Note that the fluctuations of responses are discretization artifacts due to the sampling of the image on a pixel grid, which does not allow for exact continuous rotations.
For comparison, we show a feature map response of a conventional CNN for different image orientations below.
Since conventional CNNs are not equivariant under rotations, the response varies randomly with the image orientation. This prevents CNNs from automatically generalizing learned patterns between different reference frames.
Experimental results
E(2)-steerable convolutions can be used as a drop in replacement for the conventional convolutions used in CNNs. Keeping the same training setup and without performing hyperparameter tuning, this leads to significant performance boosts compared to CNN baselines (values are test errors in percent):
| model | CIFAR-10 | CIFAR-100 | STL-10 |
|---|---|---|---|
| CNN baseline | 2.6 ± 0.1 | 17.1 ± 0.3 | 12.74 ± 0.23 |
| E(2)-CNN * | 2.39 ± 0.11 | 15.55 ± 0.13 | 10.57 ± 0.70 |
| E(2)-CNN | 2.05 ± 0.03 | 14.30 ± 0.09 | 9.80 ± 0.40 |
The models without * are for a fair comparison designed such that the number of parameters of the baseline is approximately preserved while models with * preserve the number of channels, and hence compute. For more details we refer to our paper.
Getting Started
e2cnn is easy to use since it provides a high level user interface which abstracts most intricacies of group and representation theory away. The following code snippet shows how to perform an equivariant convolution from an RGB-image to 10 regular feature fields (corresponding to a group convolution).
from e2cnn import gspaces # 1
from e2cnn import nn # 2
import torch # 3
# 4
r2_act = gspaces.Rot2dOnR2(N=8) # 5
feat_type_in = nn.FieldType(r2_act, 3*[r2_act.trivial_repr]) # 6
feat_type_out = nn.FieldType(r2_act, 10*[r2_act.regular_repr]) # 7
# 8
conv = nn.R2Conv(feat_type_in, feat_type_out, kernel_size=5) # 9
relu = nn.ReLU(feat_type_out) # 10
# 11
x = torch.randn(16, 3, 32, 32) # 12
x = nn.GeometricTensor(x, feat_type_in) # 13
# 14
y = relu(conv(x)) # 15
Line 5 specifies the symmetry group action on the image plane
Lines 12 and 13 generate a random minibatch of RGB images and wrap them into a nn.GeometricTensor to associate them with their correct field type.
The equivariant modules process the geometric tensor in line 15.
Each module is thereby checking whether the geometric tensor passed to them satisfies the expected transformation law.
Because the parameters do not need to be updated anymore at test time, after training, any equivariant network can be
converted into a pure PyTorch model with no additional computational overhead in comparison to conventional CNNs.
The code currently supports the automatic conversion of a few commonly used modules through the .export() method;
check the documentation for more details.
A hands-on tutorial, introducing the basic functionality of e2cnn, is provided in introduction.ipynb. Code for training and evaluating a simple model on the rotated MNIST dataset is given in model.ipynb.
More complex equivariant Wide Resnet models are implemented in e2wrn.py. To try a model which is equivariant under reflections call:
cd examples
python e2wrn.py
A version of the same model which is simultaneously equivariant under reflections and rotations of angles multiple of 90 degrees can be run via:
python e2wrn.py --rot90
Dependencies
The library is based on Python3.7
torch>=1.1
numpy
scipy
Optional:
pymanopt
autograd
The following packages
sympy
rbf
are required to use the steerable differential operators.
Check the branch legacy_py3.6 for a Python 3.6 compatible version of the library.
Installation
You can install the latest release as
pip install e2cnn
or you can clone this repository and manually install it with
pip install git+https://github.com/QUVA-Lab/e2cnn
NOTE: the rbf dependency (necessary to use differential operators) can not
be installed automatically since PyPI does not support direct dependencies
(see here).
You can install rbf manually by following these instructions.
Cite
The development of this library was part of the work done for our paper General E(2)-Equivariant Steerable CNNs. Please cite this work if you use our code:
@inproceedings{e2cnn,
title={{General E(2)-Equivariant Steerable CNNs}},
author={Weiler, Maurice and Cesa, Gabriele},
booktitle={Conference on Neural Information Processing Systems (NeurIPS)},
year={2019},
}
The implementation of steerable PDOs are part of the work done in the paper Steerable Partial Differential Operators for Equivariant Neural Networks. Please, cite it if you use this code in your own work:
@inproceedings{jenner2022steerable,
title={Steerable Partial Differential Operators for Equivariant Neural Networks},
author={Erik Jenner and Maurice Weiler},
booktitle={International Conference on Learning Representations},
year={2022},
url={https://openreview.net/forum?id=N9W24a4zU}
}
Feel free to contact us.
License
e2cnn is distributed under BSD Clear license. See LICENSE file.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file e2cnn-0.2.3.tar.gz.
File metadata
- Download URL: e2cnn-0.2.3.tar.gz
- Upload date:
- Size: 149.7 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.1 CPython/3.7.13
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
121cbf2b4ec16bf60a36d165c8eb6651947d1144aaabd6ad5efd2b93722b41f2
|
|
| MD5 |
1a2b9b0bfc1f7fb4033bd1cf8b9b7d14
|
|
| BLAKE2b-256 |
5fa3d52132d2ddc24920eb983dac21b0a2f1c10defdc9b76484ba2fabb5a8992
|
File details
Details for the file e2cnn-0.2.3-py3-none-any.whl.
File metadata
- Download URL: e2cnn-0.2.3-py3-none-any.whl
- Upload date:
- Size: 225.3 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.1 CPython/3.7.13
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
a4cb2a3bca8926c628abc41dc4921a05c8758f21c1e69b5d5e641699c12d4f7d
|
|
| MD5 |
759a6d07bccc93077048cf82a7b73644
|
|
| BLAKE2b-256 |
a14d05b0dd45848e41c1b5e93755682a9e593f19a92e01aeb57b327f15881e3f
|







