Gaussian processes in NumPyro and JAX

Project description
GPax





GPax is a small Python package for physics-based Gaussian processes (GPs) built on top of NumPyro and JAX. Its purpose is to take advantage of prior physical knowledge and different data modalities when using GPs for data reconstruction and active learning. It is a work in progress, and more models will be added in the near future.
How to use
Simple GP
1D Example

The code snippet below shows how to use vanilla GP in a fully Bayesian mode. First, we infer GP model parameters from the available training data
import gpax
# Get random number generator keys for training and prediction
rng_key, rng_key_predict = gpax.utils.get_keys()
# Initialize model
gp_model = gpax.ExactGP(1, kernel='RBF')
# Run Hamiltonian Monte Carlo to obtain posterior samples for the GP model parameters
gp_model.fit(rng_key, X, y) # X and y are numpy arrays with dimensions (n, d) and (n,)
In the fully Bayesian mode, we get a pair of predictive mean and covariance for each Hamiltonian Monte Carlo sample containing the GP parameters (in this case, the RBF kernel hyperparameters and model noise). Hence, a prediction on new inputs with a trained GP model returns the center of the mass of all the predictive means (posterior_mean) and samples from multivariate normal distributions for all the pairs of predictive means and covariances (f_samples).
posterior_mean, f_samples = gp_model.predict(rng_key_predict, X_test)
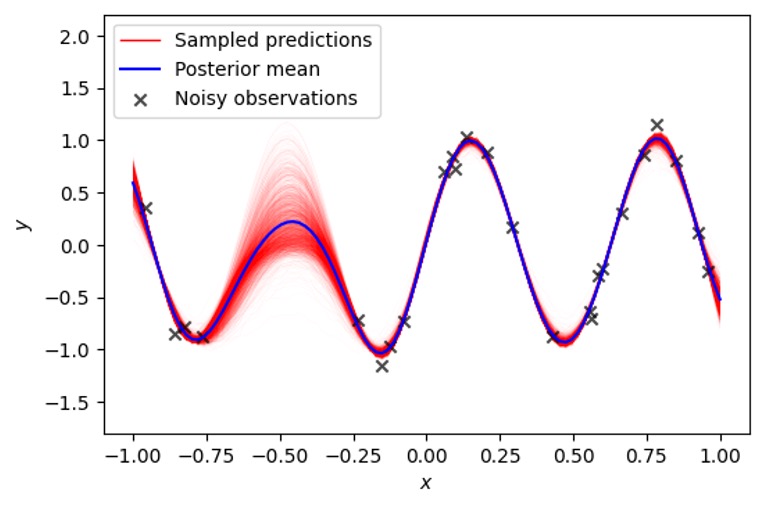
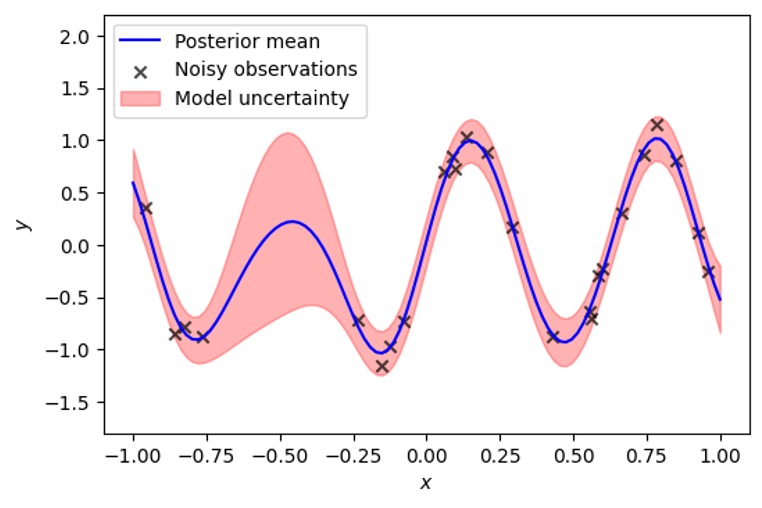
For 1-dimensional data, we can plot the GP prediction using the standard approach where the uncertainty in predictions - represented by a standard deviation in y_sampled - is depicted as a shaded area around the mean value.
See the full example, including specification of custom GP kernel priors, here.
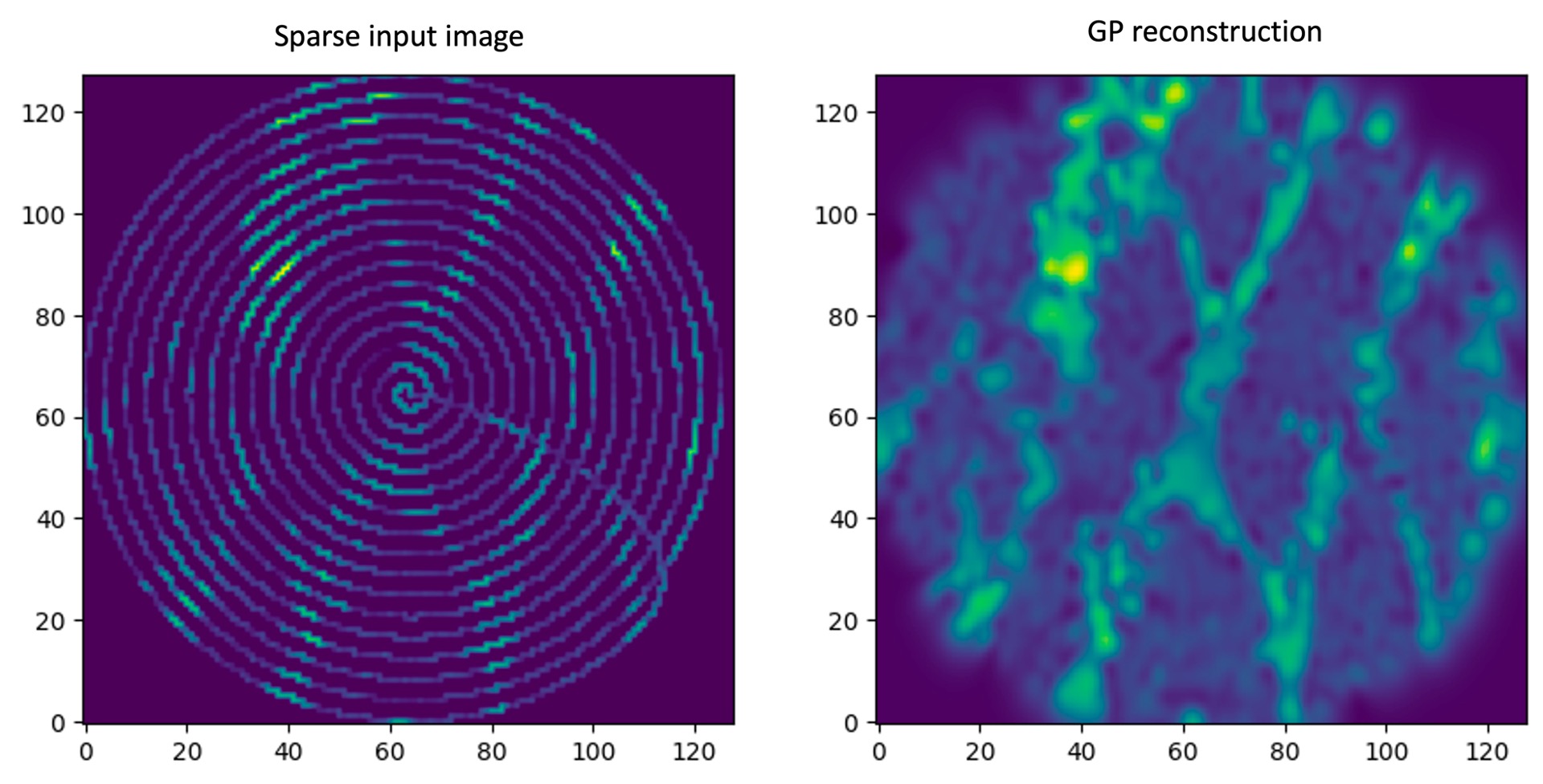
Sparse Image Reconstruction
One can also use GP for sparse image reconstruction. The fully Bayesian GP is typically too slow for this purpose and it makes sense to use a stochastic variational inference approximation (viGP) instead. Code-wise, the usage of viGP in GPax is almost the same as that of the fully Bayesian GP. One difference is that instead of num_samples we have num_steps. We can also control the learning rate by specifying a step_size.
# Get training inputs/targets and full image indices from sparse image data
X_train, y_train, X_full = gpax.utils.preprocess_sparse_image(sparse_img) # sparse_img is a 2D numpy array
# Initialize and train a variational inference GP model
gp_model = gpax.viGP(2, kernel='Matern', guide='delta')
gp_model.fit(rng_key, X_train, y_train, num_steps=250, step_size=0.05)
When we run the .predict() method, the output is predictive mean and variance computed from a learned single estimate of the GP model parameters:
y_pred, y_var = gp_model.predict(rng_key_predict, X_full)
Finally, for larger images or hyperspecteral data, one can use the inducing inputs approximation to GP, which is also available in GPax. See the full example here.
Structured GP
The limitation of the standard GP is that it does not usually allow for the incorporation of prior domain knowledge and can be biased toward a trivial interpolative solution. Recently, we introduced a structured Gaussian Process (sGP), where a classical GP is augmented by a structured probabilistic model of the expected system’s behavior. This approach allows us to balance the flexibility of the non-parametric GP approach with a rigid structure of prior (physical) knowledge encoded into the parametric model. Implementation-wise, we substitute a constant/zero prior mean function in GP with a probabilistic model of the expected system's behavior.
For example, if we have prior knowledge that our objective function has a discontinuous 'phase transition', and a power law-like behavior before and after this transition, we may express it using a simple piecewise function
import jax.numpy as jnp
def piecewise(x: jnp.ndarray, params: Dict[str, float]) -> jnp.ndarray:
"""Power-law behavior before and after the transition"""
return jnp.piecewise(
x, [x < params["t"], x >= params["t"]],
[lambda x: x**params["beta1"], lambda x: x**params["beta2"]])
where jnp corresponds to jax.numpy module. This function is deterministic. To make it probabilistic, we put priors over its parameters with the help of NumPyro
import numpyro
from numpyro import distributions
def piecewise_priors():
# Sample model parameters
t = numpyro.sample("t", distributions.Uniform(0.5, 2.5))
beta1 = numpyro.sample("beta1", distributions.Normal(3, 1))
beta2 = numpyro.sample("beta2", distributions.Normal(3, 1))
# Return sampled parameters as a dictionary
return {"t": t, "beta1": beta1, "beta2": beta2}
Finally, we train the sGP model and make predictions on new data in the almost exact same way we did for vanilla GP. The only difference is that we pass our structured probabilistic model as two new arguments (the piecewise function and the corresponding priors over its parameters) when initializing GP.
# Get random number generator keys
rng_key, rng_key_predict = gpax.utils.get_keys()
# initialize structured GP model
sgp_model = gpax.ExactGP(1, kernel='Matern', mean_fn=piecewise, mean_fn_prior=piecewise_priors)
# Run MCMC to obtain posterior samples
sgp_model.fit(rng_key, X, y)
# Get GP prediction on new/test data
posterior_mean, f_samples = sgp_model.predict(rng_key_predict, X_test)
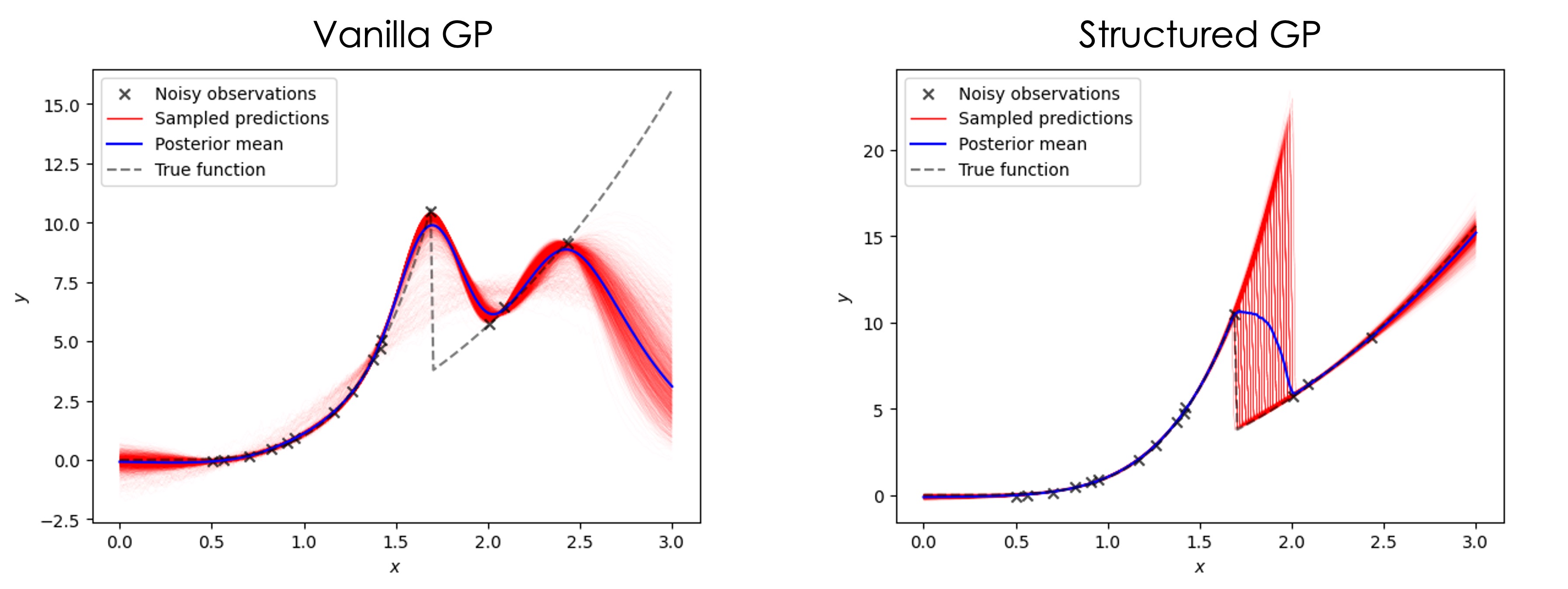
Structured GP is usually better at extrapolation and provides more reasonable uncertainty estimates. The probabilistic model in structured GP reflects our prior knowledge about the system, but it does not have to be precise, that is, the model can have a different functional form, as long as it captures general or partial trends in the data. The full example including the active learning part is available here.
Active learning and Bayesian optimization
Both GP and sGP can be used for active learning to reconstruct the entire data distribution from sparse observations or to localize regions of the parameter space where a particular physical behavior is maximized or minimized with as few measurements as possible (the latter is usually referred to as Bayesian optimization).
# Train a GP model (it can be sGP or vanilla GP)
gp_model.fit(rng_key, X_measured, y_measured) # A
# Compute the upper confidence bound (UCB) acquisition function to derive the next measurement point
acq = gpax.acquisition.UCB(rng_key_predict, gp_model, X_unmeasured, beta=4, maximize=False, noiseless=True) # B
next_point_idx = acq.argmax() # C
next_point = X_unmeasured[next_point_idx] # D
# Perform measurement in next_point, update measured & unmeasured data arrays, and re-run steps A-D.
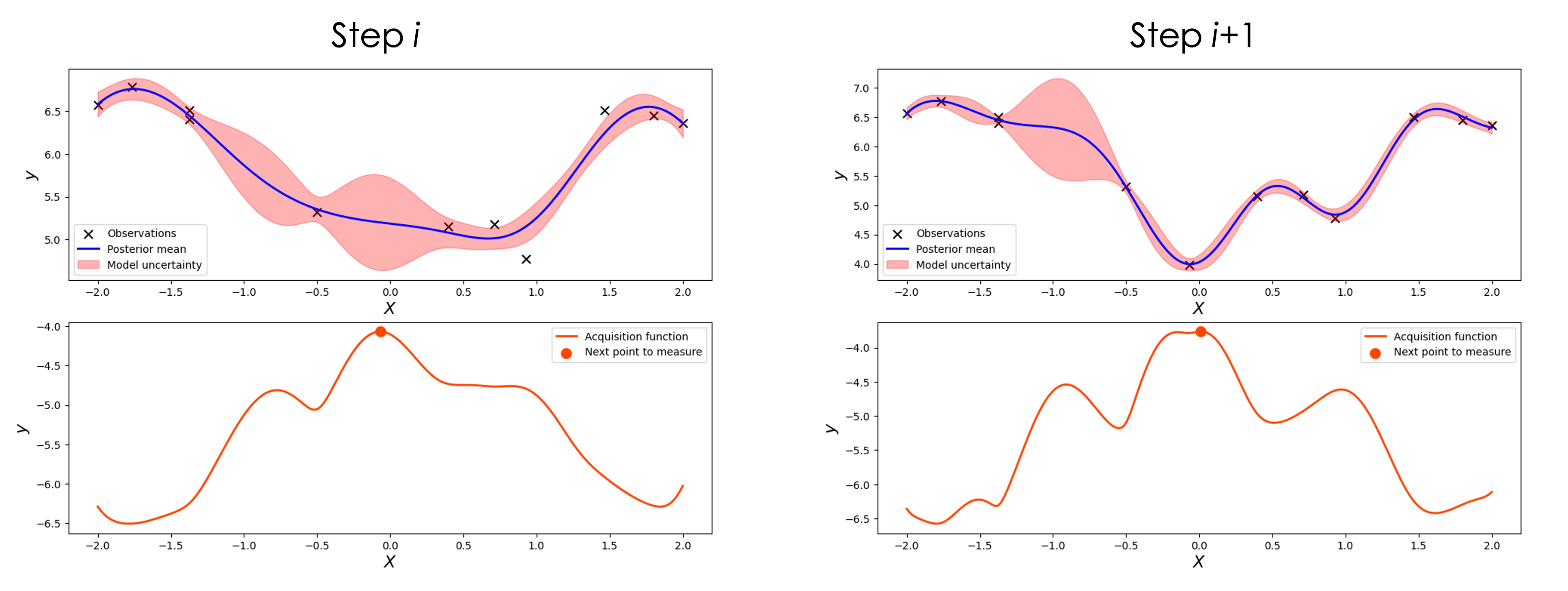
In the figure below we illustrate the connection between the (s)GP posterior predictive distribution and the acquisition function used to derive the next measurement points. Here, the posterior mean values indicate that the minimum of a "black box" function describing a behavior of interest is around $x=0.7$. At the same time, there is a large dispersion in the samples from the posterior predictive distribution between $x=-0.5$ and $x=0.5$, resulting in high uncertainty in that region. The acquisition function is computed as a function of both predictive mean and uncertainty and its maximum corresponds to the next measurement point in the active learning and Bayesian optimization. Here, after taking into account the uncertainty in the prediction, the UCB acquisition function suggests exploring a point at x≈0 where potentially a true minimum is located. See full example here.
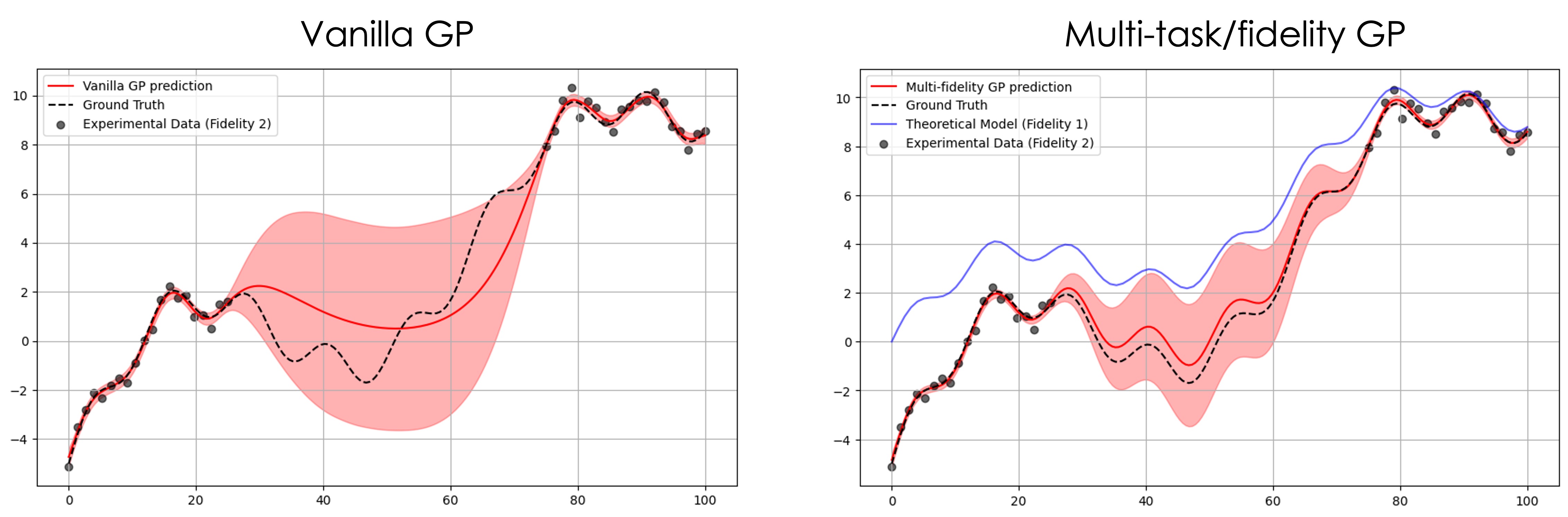
Theory-informed data reconstruction and Bayesian optimization
Sometimes when theoretical simulations are available before the experiment, they can be used to guide the measurements or simply reconstruct sparse data via a multi-task/fidelity Gaussian process. This can be used as an alternative solution to a structured Gaussian process in situations where a mean function is too costly to compute at each step or it is expressed through some complex program that is not fully differentiable. The overall scheme is the same, but now our GP model is a MultitaskGP:
key1, key2 = gpax.utils.get_keys(1)
gp_model = gpax.MultiTaskGP(
input_dim=1, data_kernel='Matern', # standard GP parameters
shared_input_space=False, # different tasks/fidelities have different numbers of observations
num_latents=2, rank=2, # parameters of multi-task GP
)
model.fit(key1, X, y, num_warmup=500, num_samples=500)
Note that X has (N, D+1) dimensions where the last column contains task/fidelity indices for each observation. We can then use the trained model to make a prediction for partially observed data:
# Create a set of inputs for the task/fidelity 2
X_unmeasured2 = np.column_stack((X_full_range, np.ones_like(X_full_range)))
# Make a prediction with the trained model
posterior_mean2, f_samples2 = model.predict(key2, X_unmeasured2, noiseless=True)
Hypothesis learning
The structured GP can also be used for hypothesis learning in automated experiments. The hypothesis learning is based on the idea that in active learning, the correct model of the system’s behavior leads to a faster decrease in the overall Bayesian uncertainty about the system under study. In the hypothesis learning setup, probabilistic models of the possible system’s behaviors (hypotheses) are wrapped into structured GPs, and a basic reinforcement learning policy is used to select a correct model from several competing hypotheses. The example of hypothesis learning on toy data is available here.
Deep kernel learning
Deep kernel learning (DKL) can be understood as a hybrid of deep neural network (DNN) and GP. The DNN serves as a feature extractor that allows reducing the complex high-dimensional features to low-dimensional descriptors on which a standard GP kernel operates. The parameters of DNN and of GP kernel are inferred jointly in an end-to-end fashion. Practically, the DKL training inputs are usually patches from an (easy-to-acquire) structural image, and training targets represent a physical property of interest derived from the (hard-to-acquire) spectra measured in those patches. The DKL output on the new inputs (image patches for which there are no measured spectra) is the expected property value and associated uncertainty, which can be used to derive the next measurement point in the automated experiment.
GPax package has the fully Bayesian DKL (weights of neural network and GP hyperparameters are inferred using Hamiltonian Monte Carlo) and the Variational Inference approximation of DKL, viDKL. The fully Bayesian DKL can provide an asymptotically exact solution but is too slow for most automated experiments. Hence, for the latter, one may use the viDKL
import gpax
# Get random number generator keys for training and prediction
rng_key, rng_key_predict = gpax.utils.get_keys()
# Obtain/update DKL posterior; input data dimensions are (n, h*w*c)
dkl = gpax.viDKL(input_dim=X.shape[-1], z_dim=2, kernel='RBF') # A
dkl.fit(rng_key, X_train, y_train, num_steps=100, step_size=0.05) # B
# Compute UCB acquisition function
obj = gpax.acquisition.UCB(rng_key_predict, dkl, X_unmeasured, maximize=True) # C
# Select next point to measure (assuming grid data)
next_point_idx = obj.argmax() # D
# Perform measurement in next_point_idx, update measured & unmeasured data arrays, and re-run steps A-D.
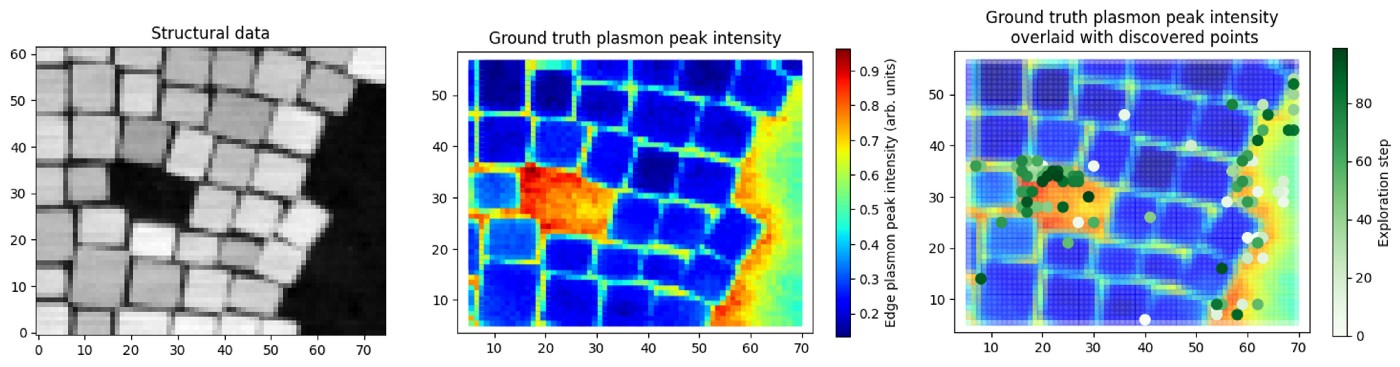
Below we show a result of a simple DKL-based search for regions of the nano-plasmonic array that host edge plasmons. The full example is available here.
Note that in viDKL, we use a simple MLP as a default feature extractor. However, you can easily write a custom DNN using haiku and pass it to the viDKL initializer
import haiku as hk
class ConvNet(hk.Module):
def __init__(self, embedim=2):
super().__init__()
self._embedim = embedim
def __call__(self, x):
x = hk.Conv2D(32, 3)(x)
x = jax.nn.relu(x)
x = hk.MaxPool(2, 2, 'SAME')(x)
x = hk.Conv2D(64, 3)(x)
x = jax.nn.relu(x)
x = hk.Flatten()(x)
x = hk.Linear(self._embedim)(x)
return x
dkl = gpax.viDKL(X.shape[1:], 2, kernel='RBF', nn=ConvNet) # input data dimensions are (n,h,w,c)
dkl.fit(rng_key, X_train, y_train, num_steps=100, step_size=0.05)
obj = gpax.acquisition.UCB(rng_key_predict, dkl, X_unmeasured, maximize=True)
next_point_idx = obj.argmax()
Installation
If you would like to utilize a GPU acceleration, follow these instructions to install JAX with a GPU support.
Then, install GPax using pip. We recommend installing the latest stable deployment from PyPI using
pip install gpax
Otherwise, if you are confident in what's on the main branch of GPax, you can also install directly from the GitHub repository:
pip install git+https://github.com/ziatdinovmax/gpax
If you are a Windows user, we recommend to use the Windows Subsystem for Linux (WSL2), which comes free on Windows 10 and 11.
Cite us
If you use GPax in your work, please consider citing our papers:
@article{ziatdinov2021physics,
title={Physics makes the difference: Bayesian optimization and active learning via augmented Gaussian process},
author={Ziatdinov, Maxim and Ghosh, Ayana and Kalinin, Sergei V},
journal={arXiv preprint arXiv:2108.10280},
year={2021}
}
@article{ziatdinov2021hypothesis,
title={Hypothesis learning in an automated experiment: application to combinatorial materials libraries},
author={Ziatdinov, Maxim and Liu, Yongtao and Morozovska, Anna N and Eliseev, Eugene A and Zhang, Xiaohang and Takeuchi, Ichiro and Kalinin, Sergei V},
journal={arXiv preprint arXiv:2112.06649},
year={2021}
}
Funding acknowledgment
This work was supported by the U.S. Department of Energy, Office of Science, Basic Energy Sciences Program.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file gpax-0.1.9.tar.gz.
File metadata
- Download URL: gpax-0.1.9.tar.gz
- Upload date:
- Size: 61.3 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: python-requests/2.32.2
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d86d2738ae3f83a5c5fdb65f6bc421a27d49c46198a9677464f1879a95fcfcca
|
|
| MD5 |
2ff9bf4fdc41967b75a23f6de1b3c7c7
|
|
| BLAKE2b-256 |
9eb8b45ecc6fe6c6d8363f1c66fd07b3a14dc1c1d09c1d0b18d5202a74fb4e91
|
File details
Details for the file gpax-0.1.9-py3-none-any.whl.
File metadata
- Download URL: gpax-0.1.9-py3-none-any.whl
- Upload date:
- Size: 78.0 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: python-requests/2.32.2
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
c05c51d1e276e2a6515ee5fcdbf2984086a2e04ad2e305cf8e3bb648c59fa801
|
|
| MD5 |
3eba3560fc1eb10d1d0339e14873327f
|
|
| BLAKE2b-256 |
8a536456013878a81f1ff44aec72d8a32b2b5b17ce2a8b569f75240ff30a4e3a
|







