Provides a set of tools to implement Higher-Order Cellular Automata populations

Project description
hoca: an Higher-Order Cellular Automata Python Library
Overview
In the 80's many computer science magazines featured articles on Conway's game of life and Wolfram's elementary cellular automata. Many of these articles told us that cellular automata would revolutionize the arts and sciences. There have indeed been some interesting scientific developments, but we cannot say that this announcement turned out to be premonitory, at least for the arts.
hoca is a work in progress which aims to provide a framework to test ideas around the use of higher-order
cellular automata to manipulate or create images. It is born while having some artistic goal in mind, but the
approach quickly led to compare it with some traditional algorithms of the image processing toolkit.
So this work is double bound to visual arts and computer science.
Hoca is a Python library, and its code was primarily written with readability before speed in mind. So relax
and enjoy the scenery.
Installation
The latest version of hoca is installed via a standard pip command:
pip install hoca
Documentation
All the code is documented and largely commented, and we strongly recommend taking a look at it. However, in the following lines, we will introduce some concepts and present some examples. But this matter could always be enhanced, so feel free to send us any comment, suggestion or question.
Concepts
hoca relies on three concepts provided as classes and their subclasses: The fields, the populations, and
the automata.
Fields hold the data processed by the automata population - a collection of agents - while populations
orchestrate the global behaviour of the automata.
Field classes
The Field abstract class (in the hoca.core.automata_framework module) provides a common set of definitions of
a field implementation. At the moment, there is only one implementation provided, the ImageField
subclass (in the hoca.core.ImageField module) that allows image manipulation.
Fields are data structures that hold the source data processed by an automata population, or the result data produced by them. Fields can also be both source and result at the same time, this way the automata can modify the field in place.
For this purpose fields have an io_mode property that defines if they are:
- readable:
io_mode == Field.IOMode.IN - writable:
io_mode == Field.IOMode.OUT - readable and writable:
io_mode == Field.IOMode.INOUT
The ImageField class provides two convenience class methods:
from_image()that creates an ImageField instance from an image file,blank()that creates an ImageField filled with zeros.
Once a field (or multiple ones) has been instantiated, it has to be packed in a Python dictionary before being passed to the automata population. The key used along with the field will serve to select the data to be read or written by the automata, and to name the logged data.
To facilitate the preparation of the necessary field(s) to be supplied to an automata population, one may
call the build_field_dict() class method that all the automata classes must provide.
Population classes
The Population abstract class (in the hoca.core.automata_framework module) provides a minimal set
of definitions of the necessary methods for the automata population operation. The implementation of
these methods is provided in the BasicPopulation class (in the hoca.core.BasicPopulation module).
BasicPopulation offers two main methods:
run()which runs all the automata once (i.e. one generation),play()which runs all the automata for multiple generations.
The first is the most complex of the two as play() simply calls run() repeatedly.
BasicPopulation implements every features needed to achieve some task with a population of automata
(or at least the features we wanted to investigate), and it's quite easy to use:
-
Build a dictionary referencing one or more fields,
-
instantiate a
BasicPopulationpassing the field dictionary and an automata class to it, -
play the population for a while.
The result of the automata process will be in the fields and that's maybe all one wants. However, to have
a clearer view on what's going on with the automata population or for debugging purpose, hoca provides
a BasicPopulation subclass: The CallbackPopulation (in the hoca.monitor.CallbackPopulation module).
The CallbackPopulation works the same as the BasicPopulation but it allows providing callbacks that are
invoked at the end of each generation (more on that below). These callbacks can log some information about
the state of the population or build a video of the movements of the automata.
Automata class
The Automata abstract class (in the hoca.core.automata_framework module) defines the methods all
automaton classes must implement. There are three important methods:
-
The
build_field_dict()class method is responsible for building a well-formed field dictionary in order for the automata of this class to be able to process the data they contain. The field dictionary will be passed to the population later on. -
The
run()method defines the behaviour of each automaton instance of the implementedAutomatonclass. Therun()method is in charge of:- Moving the automaton, and
- updating the field(s).
-
The
get_status()method computes and returns the current status of the automaton. This method will be invoked on each generation for each automaton.
Getting started with hoca
The hoca.demo.LiteEdgeAutomaton module provides the LiteEdgeAutomaton automata class. These automata
crawl an ImageField containing an image, and fill another ImageField with the contours found
in the first.
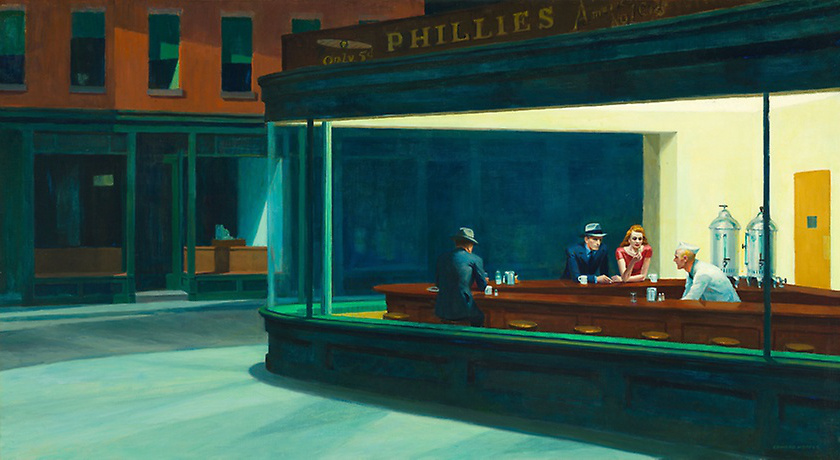
Edward Hopper. Nighthawks, 1942. (CC0) The Art Institute of Chicago.
https://www.artic.edu/artworks/111628/nighthawks
(source field)
We will now see how to write some code to use this class: We have to build a field dictionary to:
-
provide the source image and receive the contours drawn,
-
constitute a population of
LiteEdgeAutomaton, -
and then play the population.
Here is the code:
import random
from hoca.core.BasicPopulation import BasicPopulation
from hoca.demo.LiteEdgeAutomaton import LiteEdgeAutomaton
# It may be of some interest to init the pseudo random generator to get consistent result
# across multiple runs. This is optional.
random.seed('This is the seed')
# Build the field
field_dict = LiteEdgeAutomaton.build_field_dict('images/EdwardHopper_Nighthawks_1942.jpg')
# Create the automata population
automata_count = 3800
automata_population = BasicPopulation(field_dict, automata_count, LiteEdgeAutomaton)
# Play the population
automata_population.play(stop_after=2700)
# Display the result
field_dict["result"].image.show()
Obviously, the code starts with the importation of the stuff it will need, it then initializes the field
dictionary. In order to do that, the code calls the build_field_dict() convenience class method of the automata
class, passing the image to process to it. In this case, the returned dictionary contains two items the
"source" field and the "result" field.
Note the parameters of build_field_dict() may change from class to class as the data to be processed may
differ.
The automata population is created by instantiating the BasicPopulation class. The program passes the field
dictionary, the number of automata to instantiate and the class of the automata to it.
The population is then played for 2700 generations by calling the play() method.
The program ends displaying the result field as an image. The field dictionary may also be accessed through the
corresponding property of the population instance (here automata_population.field_dict).

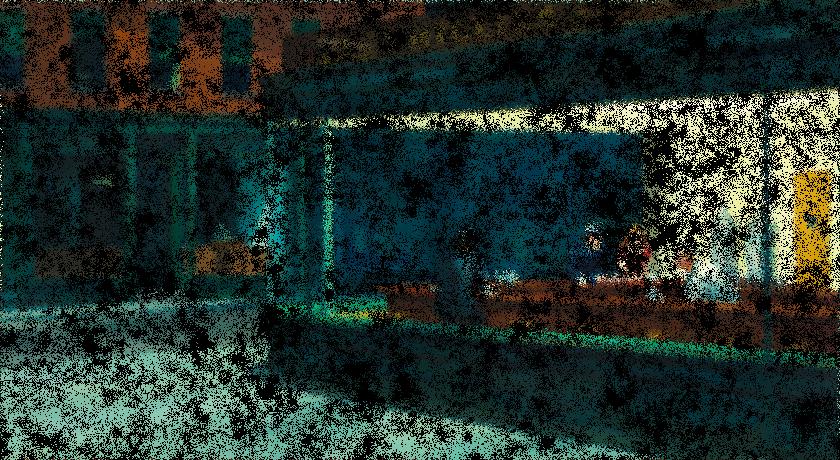
Hopper's Nighthawks after 2700 generations with 3800 LiteEdgeAutomaton automata.
(result field)
As the image representation of a field is a PIL Image class instance, it can be saved or manipulated in many ways. See the Pillow Image module documentation for more information.
In the previous program, one can see the number of automata to instantiate or the number of generations as kind
of magic numbers.
These numbers depend on the job the automata are doing, or the data provided. For instance, these numbers have
probably to be increased if the source image is larger.
In the case of the LiteEdgeAutomaton, these numbers are discussed in [1].
Let's make a video
The CallbackPopulation class allows doing various tasks at each generation. For instance, we can aggregate
the result field at each generation to produce a video showing the effect of an automata population on a
source field:
import random
from hoca.demo.LiteEdgeAutomaton import LiteEdgeAutomaton
from hoca.monitor.CallbackPopulation import *
# It may be of some interest to init the pseudo random generator to get consistent result
# across multiple runs. This is optional.
random.seed('This is the seed')
# Build the field
field_dict = LiteEdgeAutomaton.build_field_dict('images/EdwardHopper_Nighthawks_1942.jpg')
# Create the automata population
automata_count = 3800
stop_after = 2700
automata_population = CallbackPopulation(field_dict, automata_count, LiteEdgeAutomaton)
# Register the callbacks...
# A logging callback
automata_population.register_callback(LogProgressCallback(automata_population))
# A video building callback
# video is built from the result fields each 5 generations
automata_population.register_callback(
SaveFieldsVideoCallback(automata_population,
activation_condition_function=Callback.condition_each_n_generation(5)))
# Play the population
automata_population.play(stop_after=stop_after)
This code is quite similar to the previous one. But after having initialized the population class, some
callbacks are registered before playing the population. These callbacks are instances
of one of the abstract Callback subclass (all defined in the hoca.monitor.CallbackPopulation module):
-
LogProgressCallbacklogs the progress of the computation in a file or to the console. -
SaveFieldsImageCallbackandSaveFieldsVideoCallbacksave the fields manipulated by the automata population as a collection of images (stored in a folder) or as a video. -
SaveTracesImageCallbackorSaveTracesVideoCallbacksave the trace - the positions and/or the trajectories - of the automata population as a collection of images (stored in a folder) or as a video. These are particularly useful to debug an automaton code.
These callbacks must receive the population as a parameter. They are called on every generation but they can
also receive an optional so-called activation function (or an activation function generator) in order
to control when the callback will have to do its job.
For instance, this mechanism could be used to make the callback aggregate some data at each generation but
only report a summary once in a while.
The activation function will take the population as parameter and return True if some condition has
occurred (and False otherwise).
In the above example, Callback.condition_each_n_generation(5) is a function generator which builds an
activation function returning True every 5 generations. Hence, the video produced will have 2700 / 5
frames (it's 21.6s at 25fps).
We may add the following lines to trace the trajectories of the automata:
# A callback tracing the automata trajectories
automata_population.register_callback(
SaveTracesImageCallback(automata_population,
trace=Trace.TRAJECTORIES,
activation_condition_function=Callback.condition_at_generation(stop_after)))
Coding an automaton
Writing the code of an automaton needs to take care of few important things. We will illustrate the whole process by describing the important elements of an automata class and writing a toy arty automata class.
An automata class must inherit the Automaton abstract class and implement some mandatory methods:
-
build_field_dict()class method. This method will be used to build a proper field dictionary for the automaton we are writing. The field dictionary will contain one or more fields. The number of fields depends on what the automata are processing. The name (or keys as they're stored in a Python dictionary) can be chosen freely. -
run()instance method. This method will contain the code controlling the behaviour of the automaton. It will be called on each generation by the class that handles the automata population (presumablyBasicPopulationorCallbackPopulation). It will have to:-
Read the value at the current automaton position of any provided input (or input-output) field. However, please note that nothing prevents the automaton to read the value at any other coordinates.
-
Write the value at the current automaton position of any provided output (or input-output) field. The same remark as reading the input field(s) applies, the writing can occur anywhere.
-
Update the state of the automaton.
-
Move the automaton to an adjacent field position. But as before, nothing prevents the automaton to jump anywhere.
These tasks may be done in any order (compatible with the purpose of the automaton). Some of them can be omitted if they aren't necessary.
-
-
get_status()instance method. This method will return the current status of the automaton, an instance of thehoca.core.automata_framework.AutomatonStatusclass. -
describe()class method. This method will return a string describing the automata class.
We also have to implement the __init__() method without omitting to call super().__init__() to invoke
the corresponding function of the parent class. As we are interested in higher-order automata,
the __init__() method has the responsibility to initialize the state or "memory" of the automaton for
later use.
Let say we want to write an automata class that shuffles the content of a field containing an image, moving the pixels along a specified distance and in a random direction. That may look similar to the Spread filter of the GNU Image Manipulation Program.
The code below is an implementation of such an antomaton. It is commented to explain how it works, but you'll find more explanations below it.
# Import the needed modules.
import random
from hoca.core.automata_framework import Automaton, AutomatonStatus
from hoca.core.ImageField import ImageField
from hoca.core.utilities import AutomataUtilities
class SpreadingAutomaton(Automaton):
# The amount class variable determines how far a pixel will be moved.
amount = 5
@classmethod
def build_field_dict(cls, image_path):
# Build a field dictionary:
# - The source field is a read-only field built from the provided image.
# - The result field is a blank write-only field the same size of the source field.
source_field = ImageField.from_image(image_path, io_mode=ImageField.IOMode.IN, image_mode="RGB")
return {'source': source_field,
'result': ImageField.blank(source_field.size, io_mode=ImageField.IOMode.OUT, image_mode="RGB")}
def __init__(self, automata_population):
super().__init__()
# Keep a shortcut to the fields, it improves readability
# and may be efficient as it is accessed quite often.
# Set a shortcut to the fields from the fields dictionary
self.source_field = automata_population.field_dict['source']
self.result_field = automata_population.field_dict['result']
# Set an initial random position for the automaton
self.x = random.randint(0, self.source_field.width - 1)
self.y = random.randint(0, self.source_field.height - 1)
# As the automaton will move the pixel (it's colour actually) we also need to keep track
# we need a property to store the colour information while it's moved.
# This property is initialized with the colour value of the pixel at its current position
self.colour = self.source_field[self.x, self.y]
# We also need to know how far the pixel has been moved up to now.
self.distance = 0
# Set the automaton life expectancy from the population size and the dimensions of the field.
# In order to have a chance to move every pixels of the image we will choose this property of the
# automaton such that the number of pixels to be processed by an automaton is equal to
# the total number of pixels in the image divided by the number of automata.
# Note that, as the process is stochastic, it doesn't ensure that all pixels will be moved,
# it just allows it.
self.pixel_count_before_death = \
self.source_field.width * self.source_field.height // automata_population.population_size
# Finally, set it alive.
self.status = AutomatonStatus.ALIVE
def run(self):
# Check if the automaton with its pixel/color has moved enough
if self.distance == self.amount:
# ... the pixel has been moved enough
# Set the color of the pixel at the current automaton position (on the result field)
self.result_field[self.x, self.y] = self.colour
# Decrease the number of pixels to be processed
self.pixel_count_before_death -= 1
# If the automaton has processed enough pixels, make it die.
if self.pixel_count_before_death == 0:
self.status = AutomatonStatus.DEAD
# And end run
return
# The automaton is still alive and it has still some pixels to process...
# Get the pixel color under the automaton (on the source field).
self.colour = self.source_field[self.x, self.y]
# Reset the distance traveled
self.distance = 0
# Move the automaton on one of the adjacent position:
# Choose a direction randomly and update the automaton position.
direction = random.randint(0, 7)
self.x, self.y = AutomataUtilities.get_x_y(direction, self.x, self.y)
# The direction may make the automaton pass a border of the field. So we need to wrap the coordinates
# around the field (or the contrary?). i.e. If the direction makes the automaton pass the right border
# of the field it will be moved to the left border and vice versa (the same for the top and bottom borders).
self.x, self.y = AutomataUtilities.wrap_coordinates(self.x, self.y, *self.source_field.size)
# Increase the count of the distance traveled so far
self.distance += 1
def get_status(self):
# Just return a status
return AutomatonStatus(self.status, self.x, self.y)
@classmethod
def describe(cls, short=True):
if short:
return f"{super().describe(short=short)}-{cls.amount}"
else:
return f"""{super().describe(short=short)}
amount: {cls.amount}"""
The build_field_dict() method will prepare the field dictionary for the automata population. There are (as usual)
many ways to look at that. The most obvious is to have a dictionary with two fields: one field filled with the source image
and one initially empty field to be filled by the automata process.
The __init()__ method initializes the state of the automaton. This state will contain the necessary properties
the automaton must "know" from one generation to the next. These are, for example, the position (x, y) of the
automaton on the fields or its status (is it living or dead?).
In the automata class we are coding, we also need to retain the colour of the pixel the automata is moving,
and the distance it has traveled. Hence, the colour instance variable is initialized with the colour found
at the automaton initial position and the distance is initialized to 0 (has the automaton has not moved yet).
Except if you always know in advance the number of generation the whole population of automata has to be run,
it is also useful to have some sort of counter to control the life expectancy of each automaton.
In our case, the pixel_count_before_death instance variable will be decreased each time the automaton has
completed a pixel move. The initial value of this variable will depend on the image size and the number of
automata in the population. Then, when the variable goes to zero, the automaton will die.
It is very important to call the __init()__ method of the parent class (however, the location of the call
isn't necessarily at the beginning of the method). In the case of our SpreadingAutomaton class, the parent class
is the abstract Automaton which __init()__ method sets the status property of the automaton to
AutomatonStatus.ALIVE in order to let it run on the first population generation.
The run() method will do the work of the automaton for one generation. It's obviously the most interesting
part of the automaton to write. In the case of the SpreadingAutomaton there are four things we need to handle:
-
The writing of the pixel colour currently stored in the
colourvariable when the automaton has moved enough. -
The death of the automaton. It has to move a number of pixel colours equal to the value of
pixel_count_before_deathvariable. After that, the automaton should die. -
The reading of a new pixel colour when the automaton has completed the handling the previous pixel colour.
-
The movement of the automaton. It has to travel a number of pixels equal to the value of the
amountclass variable.
The writing of the get_status() method is straightforward, it just had to return the status variable (along with
the coordinates). But in some cases, the run() method don't or cannot compute the status, or it depends on an event
external to the automaton instance or not occurring while the run() method is executed. Then, the automaton status
should be computed in the get_status() method.
There is not much to say about the describe() method except it's a class method and it can't report about
the automaton instance. Note this may change in the future.
So we wrote the class, now we need to run it. We'll follow the same path as in the previous section using the
CallbackPopulation class to run a population of automata while having some report about what's going on.
if __name__ == "__main__":
from hoca.monitor.CallbackPopulation import CallbackPopulation, LogProgressCallback
# Init the pseudo random generator to be able to replay the same population behaviour
# This is optional
random.seed('This is the seed')
automata_class = SpreadingAutomaton
# We can change the amount class property to spread the pixels farther.
# SpreadingAutomaton.amount = 10
# Build field
field_dict = automata_class.build_field_dict("images/EdwardHopper_Nighthawks_1942.jpg")
# Create the automata population
automata_count = 1000
automata_population = CallbackPopulation(field_dict, automata_count, automata_class)
# Register a logging callback
automata_population.register_callback(LogProgressCallback(automata_population))
# Play the population
automata_population.play(stop_after=1000000)
# Display the result
field_dict["result"].image.show()
Note that the play() method of the population is called with an arbitrary large number because the automata determine
by themselves (with the pixel_count_before_death variable) the number of generations needed to achieve their job.
So the play() method will return when all the automata have died even if it's before having reached the millionth
generation.
Hopper's Nighthawks after 1931 generations with 1000 SpreadAutomaton automata (with stains).
(result field)
You can see in the result of the execution of the automata code above. There are black stains on the spread
image. This is not necessarily desirable, and it comes from the randomness of the coverage of the fields by the
automata.
In order to avoid this phenomenon (or at least hide it), we can pre-fill the result field with the original image.
This is done with a rewritten build_field_dict() method.
@classmethod
def build_field_dict(cls, image_path):
# As the course of the automata is random (see the run() method), the source and/or result fields
# will probably not be covered entirely and the result field will contain black/blank pixels. In order to
# have a (more interesting?) result without those blank spots, one can pre-fill the result field with the
# source image:
# - The source field is a read-only field built from the provided image.
# - The result field is a write-only field built from the provided image.
return {'source': ImageField.from_image(image_path, io_mode=ImageField.IOMode.IN, image_mode="RGB"),
'result': ImageField.from_image(image_path, io_mode=ImageField.IOMode.OUT, image_mode="RGB")}
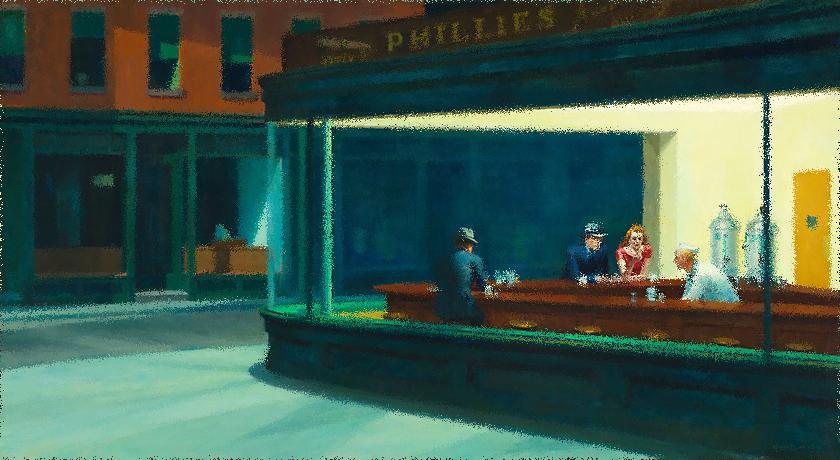
Hopper's Nighthawks after 1931 generations with 1000 SpreadAutomaton automata (without stain).
(result field)
A similar result could have been achieved by using a single input-output field. The automata would have read and write the colours on the same field, swapping the pixels at the beginning and the end of the move, or taking the colour found at the end of the move for the next move.
The code of the run() method is quite demonstrative and may be easily enhanced if the user is in need of performance.
At the moment, it takes a number of generations equal to the amount class variable for an automaton to move the colour.
But this could be done in a single generation:
# Compute the relative destination position.
dx = random.randint(-self.amount, self.amount)
dy = random.randint(-self.amount, self.amount)
# As |dx| may be greater than 1 (the same for |dy|), the automaton will "jump" from
# its current position to the next.
# Compute the destination coordinates wrapping them if they're out of the field.
self.x, self.y = AutomataUtilities.wrap_coordinates(self.x + dx, self.y + dy, *self.source_field.size)
# Finally, update the distance travelled.
self.distance = self.amount
As a final thought about this automata class, using a cellular automaton to do this kind of operation on an image isn't probably the most efficient way to get a result. However, this approach allows thinking locally (at the pixel level) instead of globally (at the image level) and may lead to simpler investigation of an idea.
Limitations
At the moment, automata are not aware of each other. This means you can't use the hoca library
to implement classic automata, the Conway's game of life for instance. You can do it actually,
but it will be in O(N²) as each automaton will have to look at all other automata in the population
to know if some are its neighbours.
Advertising hoca
It would be greatly appreciated by the authors if the images and other productions made with the hoca library
were accompanied by a citation naming it; something like:
This was produced with the
hocalibrary (https://pypi.org/project/hoca/).
You might also send us a little mail about what you're doing with hoca.
Licencing & contribution
hoca is a free software library written at Villa Arson and
I3S and released on GitHub under the LGPLv3 license.
You should have received a copy of the GNU Lesser General Public License
along with hoca. If not, see http://www.gnu.org/licenses/.
The library is copyrighted by its contributors (see source file headers).
There is a lot of room for improvements, everyone is welcome to contribute if you find any bug or have ideas for new features!
Bibliography
[1] Formenti E., Paquelin JL. (2021) High Order Cellular Automata for Edge Detection: A Preliminary Study. In: Cellular Automata. ACRI 2020. Lecture Notes in Computer Science, vol 12599. Springer, Cham. https://doi.org/10.1007/978-3-030-69480-7_9
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file hoca-2021.9.0.tar.gz.
File metadata
- Download URL: hoca-2021.9.0.tar.gz
- Upload date:
- Size: 41.8 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.4.1 importlib_metadata/4.6.0 pkginfo/1.7.0 requests/2.25.1 requests-toolbelt/0.9.1 tqdm/4.61.1 CPython/3.8.5
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
61bfbd21e06184d4b63e8f9272031f2b5d668275a8692ede2ba8e996d6e5984b
|
|
| MD5 |
662fad278285b95cd06039f1e43ac81c
|
|
| BLAKE2b-256 |
c9db92ca66adccac975525a5c7d51427729925db93c44dfdda658952144ccc83
|
File details
Details for the file hoca-2021.9.0-py3-none-any.whl.
File metadata
- Download URL: hoca-2021.9.0-py3-none-any.whl
- Upload date:
- Size: 44.9 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.4.1 importlib_metadata/4.6.0 pkginfo/1.7.0 requests/2.25.1 requests-toolbelt/0.9.1 tqdm/4.61.1 CPython/3.8.5
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
5b2d5bddd543130c690858c6d84b14bff15fa445fb33c789a065e968426b03ac
|
|
| MD5 |
9e5fb73cf409ca199e3aa581db74c4b7
|
|
| BLAKE2b-256 |
03a07bd521f03a639dd2040da6da7d8876bbfce93c31ad422b8b20281218e872
|







