Find edge-to-edge and edge-to-surface joints of planar polygons

Project description
jointfinder
This package finds edge-to-edge and edge-to-surface joints of planar polygons.
Quickstart
This package accepts list of dictionaries as input. Each dictionary should have these elements:
namepart name, numericalpointssequential points that make up a polygon in 3D cartesian coordinates, all points must be on a same plane (minimum 3 unique points per polygon)plane(optional) plane unit vector (left hand thumb direction, sequential points being the fingers)depth(optional, default: 0) polygon's thickness All scalars must be integer or float
Create test polygons (two squares).
polygons = []
# polygon name is #42
polygons += [{'name': 42,
'points': [[0, 0, 0], [0, 20, 0], [20, 20, 0], [20, 0, 0]],
'depth': 1}]
# polygon name is #43
polygons += [{'name': 43,
'points': [[20, 0, 0], [20, 20, 0], [40, 20, 0], [40, 0, 0]],
'depth': 1}]
Create JointFinder object. polygons input is tabulated as pandas dataframe. Accessible as object property df. Refer to pandas for more information on pandas.
from jointfinder import jf
JF = jf.JointFinder(polygons)
JF.df
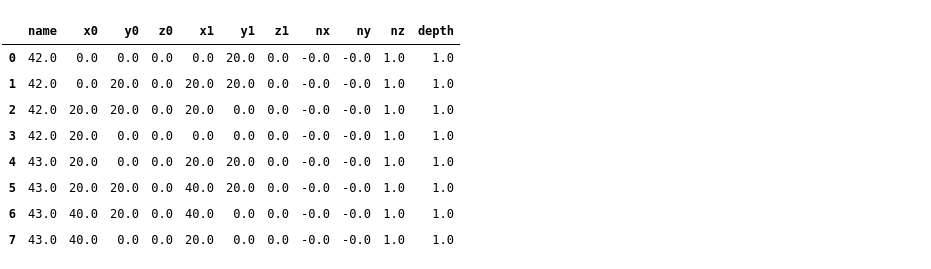
Each row represents a particular polygon's line member (edge of the polygon [x0, y0, z0] to [x1, y1, z1]). Each member has same plane vector ([nx, ny, nz]) and depth, in addition to polygon name. Plane vector is akin to left hand thumb direction, with left hand other fingers being the line sequence. This package does not validate the sequence. The depth (or plane's thickness) extrudes the same direction as plane vector.
Use plotting tool from util to view input polygons. This plotting tool does not plot polygon's depth.
from jointfinder import util
util.plot(JF.df)

Use find_joint() object function to run for solution.
joints = JF.find_joint()
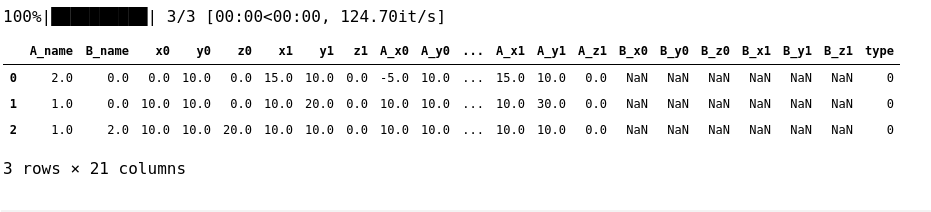
joints

Output is pandas dataframe. Prefixes A and B in columns indicate association to which polygon (a polygon that makes joint with other polygon). Each dataframe row indicates where a joint exists ([x0, y0, z0] to [x1, y1, z1]), by Polygon A's edge with either polygon B's edge or surface. Column type indicates if it is a butt joint (1: edge to edge) or t-joint (0: edge to surface).
Dataframe as Input
Alternatively, users can create their dataframe themselves (or parse to from other sources) to input directly to JointFinder as it also accepts pandas dataframe as input (in addition to list of dictionaries). Do take note that the format must follow convention of object property df.
To simulate, use util.create_dummy_block() for test dataframe.
df = util.create_dummy_block()
util.plot(df)

Similarly, create JointFinder object with test dataframe then run find_joint() object function.
JF = jf.JointFinder(df)
joints = JF.find_joint()
joints
Default test dataframe has three squares that make up a block with t-joints. To create more, pass number of rows and columns as x and y arguments to tile them.
E.g. util.create_dummy_block(x=2, y=1) creates blocks tiled in 2 x 1.

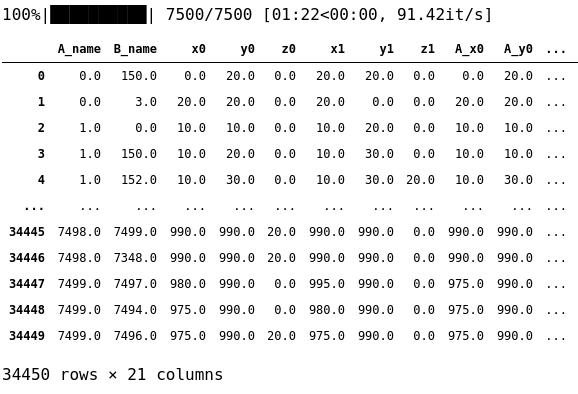
Below is example of 50 x 50 blocks.
df = util.create_dummy_block(x=50, y=50)
JF = jf.JointFinder(df)
joints = JF.find_joint()
joints
Handling Large Dataframe
It is advised to run the module's jf directly from shell or console to better benefit from computing concurrency while handling large dataframe. Prior to running, the dataframe location must be first pickled (made persistent). Alternatively, it may also be accessed from memory location which user must find out manually. Input system argument dpath to indicate where the pickled dataframe is or from memory. Output will be saved in path stated in tpath.
Use util's save_df() function to create pickle, pass dataframe and (path if otherwise desired and) file name as arguments.
util.save_df(df, 'test.pkl')
Run module's jf from shell or console (use ! only if running from jupyter. See jupyter from more information on jupyter).
!python -m jointfinder.jf dpath=test.pkl tpath=test_result.pkl
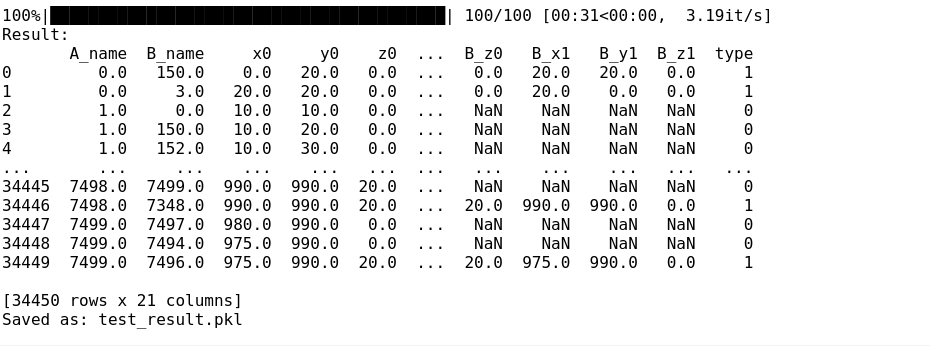
As output is also pickled, use util.load_df() to load dataframe back to a variable. User may also export the result to other formats such as csv.
result = util.load_df('test_result.pkl')
result.to_csv('test_result.csv')
About
Beta version, v1.1.x, has limited features. Full release is from v1.2.0 onwards. This package uses other dependencies (pandas, numpy, numba, tqdm, matplotlib).
Email: zhiyung.tay@singaporetech.edu.sg; januwar.hadi@singaporetech.edu.sg
Singapore Institute of Technology.


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distributions
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file jointfinder-1.1.8-py3-none-any.whl.
File metadata
- Download URL: jointfinder-1.1.8-py3-none-any.whl
- Upload date:
- Size: 29.4 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.2.0 pkginfo/1.6.1 requests/2.24.0 setuptools/51.0.0 requests-toolbelt/0.9.1 tqdm/4.48.2 CPython/3.8.5
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
3ff0615eb8c7d183b2460c98a100501fa03a2254ecc6f894a29bb1bb04cd8aad
|
|
| MD5 |
86e577754dd09dce721020160771d302
|
|
| BLAKE2b-256 |
bfef3b3e2a43ca6bbbef12b0a0daec4dc08d257200ac410e3f533f5ecbc8779c
|







