An action space representation for learning robot trajectories without exceeding limits on the position, velocity, acceleration and jerk of each robot joint.
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers

Project description
Learning Robot Trajectories subject to Kinematic Joint Constraints






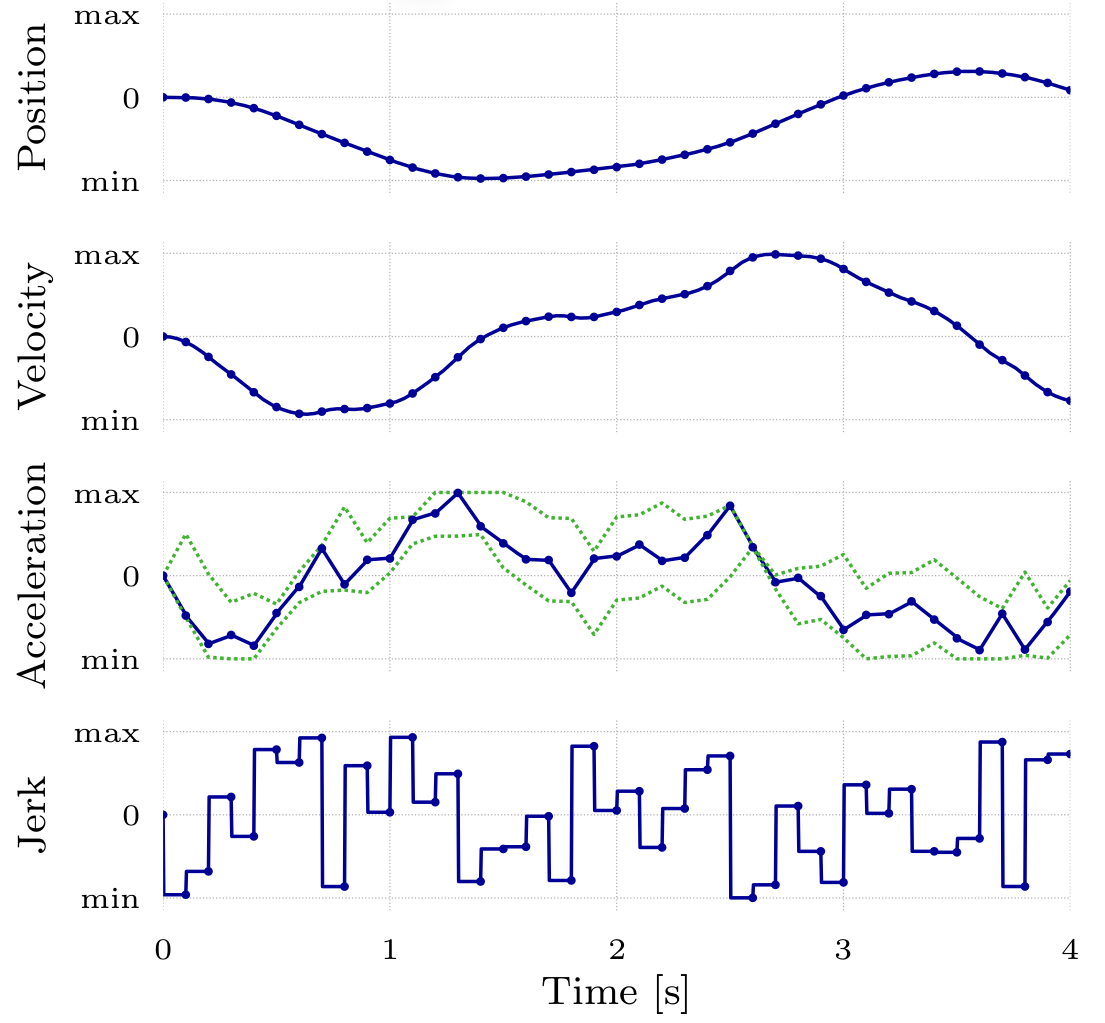
This python package enables learning of robot trajectories without exceeding limits on the position, velocity, acceleration and jerk of each robot joint.
Movements are generated by mapping the predictions of a neural network to safely executable joint accelerations. The time between network predictions must be constant, but can be chosen arbitrarily.
Our method ensures that the kinematic constraints are never in conflict, which means that there is at least one safely executable joint acceleration at any time.
This package provides the code to compute the range of safely executable joint accelerations.
Installation
The package can be installed by running
pip install klimits
Trajectory generation 
To generate a random trajectory with limited jerk, acceleration, velocity and position run
python -m klimits.test_trajectory_generation
Several parameters can be adjusted to modify the generated trajectory. E.g:
python -m klimits.test_trajectory_generation --time_step=0.1 --pos_limits='[[-2.96705972839, 2.96705972839], [-2.09439510239, 2.09439510239]]' --vel_limits='[[-1.71042266695, 1.71042266695], [-1.71042266695, 1.71042266695]]' --acc_limits='[[-15, 15], [-7.5, 7.5]]' --plot_joint='[1, 0]' --pos_limit_factor=0.9 --vel_limit_factor=0.8 --acc_limit_factor=0.7 --jerk_limit_factor=0.6 --trajectory_duration=20 --plot_safe_acc_limits
Run
python -m klimits.test_trajectory_generation --help
for further details on the optional arguments.
Further reading
A preprint of the corresponding ICRA 2021 publication is available at arXiv.org.
Further information on the implementation can be found here.
This library is used by safeMotions to learn collision-free reaching tasks via reinforcement learning.
Video
Disclaimer
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
Project details
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distributions
Built Distributions
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file klimits-1.1.3-cp313-cp313-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp313-cp313-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.6 MB
- Tags: CPython 3.13, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
810dc01bc8af96317696161b7289e26f6a5c7029b0fa81aba63ec1cc91537346
|
|
| MD5 |
f3f2323b001f06fab82c4fa3ce443873
|
|
| BLAKE2b-256 |
23e169e375605ca02424d4923ea879386e0fff40f224e79b431a69d8bccae9dd
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp313-cp313-musllinux_1_2_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp313-cp313-musllinux_1_2_x86_64.whl -
Subject digest:
810dc01bc8af96317696161b7289e26f6a5c7029b0fa81aba63ec1cc91537346 - Sigstore transparency entry: 161390891
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp313-cp313-musllinux_1_2_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp313-cp313-musllinux_1_2_i686.whl
- Upload date:
- Size: 1.5 MB
- Tags: CPython 3.13, musllinux: musl 1.2+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
ac09421fb98bbba65c0e796dcb012c2cca905c8199bf146979995bc6260a1203
|
|
| MD5 |
c92a05b487565a95d882e3475961abe6
|
|
| BLAKE2b-256 |
0104545866d4b174cce86c9a6c1b3b601583e6a548b4b19e09e832cd70dd11e6
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp313-cp313-musllinux_1_2_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp313-cp313-musllinux_1_2_i686.whl -
Subject digest:
ac09421fb98bbba65c0e796dcb012c2cca905c8199bf146979995bc6260a1203 - Sigstore transparency entry: 161390942
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp313-cp313-manylinux_2_17_x86_64.manylinux2014_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp313-cp313-manylinux_2_17_x86_64.manylinux2014_x86_64.whl
- Upload date:
- Size: 1.5 MB
- Tags: CPython 3.13, manylinux: glibc 2.17+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
4bb1f9b28ae477257d9491aa45cefb0ef218832639947a454d7c1363f30bd3d1
|
|
| MD5 |
c06150fe81ce96b6ec2e2a2ae6821c2c
|
|
| BLAKE2b-256 |
b038023ee84eb75df0ed1f03a7a3d042ba9f53a01601cca3882a7c9e22fe3317
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp313-cp313-manylinux_2_17_x86_64.manylinux2014_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp313-cp313-manylinux2014_x86_64.manylinux_2_17_x86_64.whl -
Subject digest:
4bb1f9b28ae477257d9491aa45cefb0ef218832639947a454d7c1363f30bd3d1 - Sigstore transparency entry: 161390881
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp313-cp313-manylinux_2_17_i686.manylinux2014_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp313-cp313-manylinux_2_17_i686.manylinux2014_i686.whl
- Upload date:
- Size: 1.4 MB
- Tags: CPython 3.13, manylinux: glibc 2.17+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
7ad3efc591bc538309e06f3c1de0964f46b1e17d18014fe4204e7a01bb1e625a
|
|
| MD5 |
b1cc417f2fa7eeb662ead20b2db9d3d3
|
|
| BLAKE2b-256 |
a43a6c03dad2c183369fd2ed489546b2ce79d467f6713ab056fdad9029624bba
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp313-cp313-manylinux_2_17_i686.manylinux2014_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp313-cp313-manylinux2014_i686.manylinux_2_17_i686.whl -
Subject digest:
7ad3efc591bc538309e06f3c1de0964f46b1e17d18014fe4204e7a01bb1e625a - Sigstore transparency entry: 161390935
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp312-cp312-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp312-cp312-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.6 MB
- Tags: CPython 3.12, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d960e743cfa9410a54f75fcd85dafbabd292b3add397b9fcdb6b9e4f4cdb9114
|
|
| MD5 |
1ad36fa8d6abf745c595e5a0294fb9ea
|
|
| BLAKE2b-256 |
11b4e2bfd78a15e13fb46656d4ab432ba9f1faf1cd410ecc81dc5a3d323f3385
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp312-cp312-musllinux_1_2_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp312-cp312-musllinux_1_2_x86_64.whl -
Subject digest:
d960e743cfa9410a54f75fcd85dafbabd292b3add397b9fcdb6b9e4f4cdb9114 - Sigstore transparency entry: 161390882
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp312-cp312-musllinux_1_2_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp312-cp312-musllinux_1_2_i686.whl
- Upload date:
- Size: 1.5 MB
- Tags: CPython 3.12, musllinux: musl 1.2+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
171dd1b4a0d5fafc8692beff52accf2dd79316719bc697449658b4fa71b8e6b2
|
|
| MD5 |
d7930fd3bb8a821caff4590c1edf6ff1
|
|
| BLAKE2b-256 |
61411bdb030b899ea40b51f3e565f1839897a1f58beeb8c9fb017312c0112348
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp312-cp312-musllinux_1_2_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp312-cp312-musllinux_1_2_i686.whl -
Subject digest:
171dd1b4a0d5fafc8692beff52accf2dd79316719bc697449658b4fa71b8e6b2 - Sigstore transparency entry: 161390932
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp312-cp312-manylinux_2_17_x86_64.manylinux2014_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp312-cp312-manylinux_2_17_x86_64.manylinux2014_x86_64.whl
- Upload date:
- Size: 1.5 MB
- Tags: CPython 3.12, manylinux: glibc 2.17+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
b776a9cc671775cb636be1304f40e443de13e2d47793e534587ba3446344111d
|
|
| MD5 |
4c00c6987d85c4228a42fabc9a0e5ed6
|
|
| BLAKE2b-256 |
dbe0cedb8322a4689e9d282cc05210bac4de02fd209d295e62822f4e77aa5acd
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp312-cp312-manylinux_2_17_x86_64.manylinux2014_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp312-cp312-manylinux2014_x86_64.manylinux_2_17_x86_64.whl -
Subject digest:
b776a9cc671775cb636be1304f40e443de13e2d47793e534587ba3446344111d - Sigstore transparency entry: 161390924
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp312-cp312-manylinux_2_17_i686.manylinux2014_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp312-cp312-manylinux_2_17_i686.manylinux2014_i686.whl
- Upload date:
- Size: 1.4 MB
- Tags: CPython 3.12, manylinux: glibc 2.17+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
65145695d825e7130769558e6c346763c2d80ed59aa74d10d270cb5be6ddf485
|
|
| MD5 |
1f20d7c90bee8df029b7430eaf787f97
|
|
| BLAKE2b-256 |
db22f3b2a9b8f44b37a35cbee698be5fd869c71700c5000777fdbf1ef2d31145
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp312-cp312-manylinux_2_17_i686.manylinux2014_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp312-cp312-manylinux2014_i686.manylinux_2_17_i686.whl -
Subject digest:
65145695d825e7130769558e6c346763c2d80ed59aa74d10d270cb5be6ddf485 - Sigstore transparency entry: 161390939
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp311-cp311-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp311-cp311-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.6 MB
- Tags: CPython 3.11, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
73e1a09ecb5da973f1dabd54c48ad586a0898f89e82931420bdb226675cac848
|
|
| MD5 |
ff235480d2e4916c422478695f196b8e
|
|
| BLAKE2b-256 |
fc53e248c0e44e9751d619642079fc91303a5901f91bb80361a66ce9df8af069
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp311-cp311-musllinux_1_2_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp311-cp311-musllinux_1_2_x86_64.whl -
Subject digest:
73e1a09ecb5da973f1dabd54c48ad586a0898f89e82931420bdb226675cac848 - Sigstore transparency entry: 161390912
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp311-cp311-musllinux_1_2_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp311-cp311-musllinux_1_2_i686.whl
- Upload date:
- Size: 1.6 MB
- Tags: CPython 3.11, musllinux: musl 1.2+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
2fa6db1539ce65cb086f17bac130c3301bf2f491e3173c5afbc6686c081faea8
|
|
| MD5 |
7b9174ddbb25820226d790446be42108
|
|
| BLAKE2b-256 |
a8860d06d169fe96cd9cb9d8d194bc267889b231cc3eb36b03ec76d73f4767aa
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp311-cp311-musllinux_1_2_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp311-cp311-musllinux_1_2_i686.whl -
Subject digest:
2fa6db1539ce65cb086f17bac130c3301bf2f491e3173c5afbc6686c081faea8 - Sigstore transparency entry: 161390938
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp311-cp311-manylinux_2_17_x86_64.manylinux2014_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp311-cp311-manylinux_2_17_x86_64.manylinux2014_x86_64.whl
- Upload date:
- Size: 1.5 MB
- Tags: CPython 3.11, manylinux: glibc 2.17+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
8cf2f8ee6ce7cbc48c10c580de8e33e44301b0d8a7121df053634ad466d868fb
|
|
| MD5 |
c369e99e889232e0b1f34ead61025ba3
|
|
| BLAKE2b-256 |
0684c23e9e25c77a57ff0a51f56de310f82df1f548cc2f40b5206ad1253c78db
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp311-cp311-manylinux_2_17_x86_64.manylinux2014_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp311-cp311-manylinux2014_x86_64.manylinux_2_17_x86_64.whl -
Subject digest:
8cf2f8ee6ce7cbc48c10c580de8e33e44301b0d8a7121df053634ad466d868fb - Sigstore transparency entry: 161390915
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp311-cp311-manylinux_2_17_i686.manylinux2014_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp311-cp311-manylinux_2_17_i686.manylinux2014_i686.whl
- Upload date:
- Size: 1.5 MB
- Tags: CPython 3.11, manylinux: glibc 2.17+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
708c1ff3bda71cbe7c083971bb0b2c250abac1ba36e87f4dd05cb877b8da7e11
|
|
| MD5 |
54b9299f2e2790302a93dd03dd9cfe88
|
|
| BLAKE2b-256 |
e47fe1c0bab433b9a0cd6f28059597716201cf64de683cf68f0ec198c3c6af84
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp311-cp311-manylinux_2_17_i686.manylinux2014_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp311-cp311-manylinux2014_i686.manylinux_2_17_i686.whl -
Subject digest:
708c1ff3bda71cbe7c083971bb0b2c250abac1ba36e87f4dd05cb877b8da7e11 - Sigstore transparency entry: 161390888
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp310-cp310-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp310-cp310-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.5 MB
- Tags: CPython 3.10, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
6eb2aadc949b445da2e28f12fae65961024741c8931a6044eb0d94634a041178
|
|
| MD5 |
5af292d6e14639473303a5305f5627f2
|
|
| BLAKE2b-256 |
3e0aad5241adc93cb827f3603a1b90592047f26f487b7cd6f131b1e1659dc34a
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp310-cp310-musllinux_1_2_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp310-cp310-musllinux_1_2_x86_64.whl -
Subject digest:
6eb2aadc949b445da2e28f12fae65961024741c8931a6044eb0d94634a041178 - Sigstore transparency entry: 161390925
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp310-cp310-musllinux_1_2_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp310-cp310-musllinux_1_2_i686.whl
- Upload date:
- Size: 1.5 MB
- Tags: CPython 3.10, musllinux: musl 1.2+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
8fb49e77e276a039302f2eeb07c21c115a54d45870bf040e17e06953309ae52d
|
|
| MD5 |
0182cbf01ba245c69b9bdeb592cd73c4
|
|
| BLAKE2b-256 |
b03453a56e467f70e3ab5d146bb434575a2b9e7faaac720f235d5736b113647a
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp310-cp310-musllinux_1_2_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp310-cp310-musllinux_1_2_i686.whl -
Subject digest:
8fb49e77e276a039302f2eeb07c21c115a54d45870bf040e17e06953309ae52d - Sigstore transparency entry: 161390907
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp310-cp310-manylinux_2_17_x86_64.manylinux2014_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp310-cp310-manylinux_2_17_x86_64.manylinux2014_x86_64.whl
- Upload date:
- Size: 1.4 MB
- Tags: CPython 3.10, manylinux: glibc 2.17+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
e184d7b7e025a1cf27aa97a6f74652da9efcbf046866b1250b88c3898046e41e
|
|
| MD5 |
5dafb64e3b88fa75c0e9a7e502cc35c2
|
|
| BLAKE2b-256 |
b159200bf4c674e6bb2bd09d9ae5db1bde97236368c1012c26ed9df8d9f9a9fb
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp310-cp310-manylinux_2_17_x86_64.manylinux2014_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp310-cp310-manylinux2014_x86_64.manylinux_2_17_x86_64.whl -
Subject digest:
e184d7b7e025a1cf27aa97a6f74652da9efcbf046866b1250b88c3898046e41e - Sigstore transparency entry: 161390897
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp310-cp310-manylinux_2_17_i686.manylinux2014_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp310-cp310-manylinux_2_17_i686.manylinux2014_i686.whl
- Upload date:
- Size: 1.4 MB
- Tags: CPython 3.10, manylinux: glibc 2.17+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
5f34bf51babe841fe1a756db676cd980bcb14f465b7c66bc3590f5ae001e2de6
|
|
| MD5 |
d962542010a0ef28370ea21310f2c21f
|
|
| BLAKE2b-256 |
a23c1c140a89969962ff6cbb11843947b24e75a7bc5e9ef4e0e9495fe331d646
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp310-cp310-manylinux_2_17_i686.manylinux2014_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp310-cp310-manylinux2014_i686.manylinux_2_17_i686.whl -
Subject digest:
5f34bf51babe841fe1a756db676cd980bcb14f465b7c66bc3590f5ae001e2de6 - Sigstore transparency entry: 161390944
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp39-cp39-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp39-cp39-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.5 MB
- Tags: CPython 3.9, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
3d71cbcc14dd8dffa7a274024c5a9470ebe793f9297502829dc44d26a2070568
|
|
| MD5 |
719897462eae4c5d340c4750ac4c6950
|
|
| BLAKE2b-256 |
0c2d2ce9ccfd71178d102da6b842f05d771eda51abfa91d0ac63fae99f6a32c1
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp39-cp39-musllinux_1_2_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp39-cp39-musllinux_1_2_x86_64.whl -
Subject digest:
3d71cbcc14dd8dffa7a274024c5a9470ebe793f9297502829dc44d26a2070568 - Sigstore transparency entry: 161390920
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp39-cp39-musllinux_1_2_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp39-cp39-musllinux_1_2_i686.whl
- Upload date:
- Size: 1.5 MB
- Tags: CPython 3.9, musllinux: musl 1.2+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
2086efb9f401382ca23b6afd913af0b219a9ff5295cb0934e21fe2937e70591c
|
|
| MD5 |
6820078188aa2554a700f053d95ce6dc
|
|
| BLAKE2b-256 |
9b7e43827b26a18618cf7fc1b831dbaf09b93f9a2419b89b61f80b6fdb9d50e8
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp39-cp39-musllinux_1_2_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp39-cp39-musllinux_1_2_i686.whl -
Subject digest:
2086efb9f401382ca23b6afd913af0b219a9ff5295cb0934e21fe2937e70591c - Sigstore transparency entry: 161390884
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp39-cp39-manylinux_2_17_x86_64.manylinux2014_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp39-cp39-manylinux_2_17_x86_64.manylinux2014_x86_64.whl
- Upload date:
- Size: 1.4 MB
- Tags: CPython 3.9, manylinux: glibc 2.17+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
49fab8bf9f2551b35a10c0d06f8918e7adcdae02a94810d717013e38abda648d
|
|
| MD5 |
aeb1dfe78e0c9d5cc55edbd3b3c465e5
|
|
| BLAKE2b-256 |
6b34fcf339a3e3fdd8d3e83ae41511e4380afeef6489ed14c6e8f982f595e9f9
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp39-cp39-manylinux_2_17_x86_64.manylinux2014_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp39-cp39-manylinux2014_x86_64.manylinux_2_17_x86_64.whl -
Subject digest:
49fab8bf9f2551b35a10c0d06f8918e7adcdae02a94810d717013e38abda648d - Sigstore transparency entry: 161390917
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp39-cp39-manylinux_2_17_i686.manylinux2014_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp39-cp39-manylinux_2_17_i686.manylinux2014_i686.whl
- Upload date:
- Size: 1.4 MB
- Tags: CPython 3.9, manylinux: glibc 2.17+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
c13c070c6daa41d95b404449432b61061381fa0afc2a4dcfe9233974bfb1bff9
|
|
| MD5 |
46579de559af80036e15ae8940af68e6
|
|
| BLAKE2b-256 |
c1bf46334c5fafdf1ff9ec8f9ea0bc9df2756b26b0ae9183ab765388503eda78
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp39-cp39-manylinux_2_17_i686.manylinux2014_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp39-cp39-manylinux2014_i686.manylinux_2_17_i686.whl -
Subject digest:
c13c070c6daa41d95b404449432b61061381fa0afc2a4dcfe9233974bfb1bff9 - Sigstore transparency entry: 161390901
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp38-cp38-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp38-cp38-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.6 MB
- Tags: CPython 3.8, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
a2f302bf048b5e641c9a0d55134ae4e44fd4ab85df1acc535f0cce6365001ac0
|
|
| MD5 |
95512b5d54890c652d1fb3c7c219f81d
|
|
| BLAKE2b-256 |
697eccdbcfbce6ce61148ee3e86907a8d47206a26583b91e8dbc472d32821d02
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp38-cp38-musllinux_1_2_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp38-cp38-musllinux_1_2_x86_64.whl -
Subject digest:
a2f302bf048b5e641c9a0d55134ae4e44fd4ab85df1acc535f0cce6365001ac0 - Sigstore transparency entry: 161390910
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp38-cp38-musllinux_1_2_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp38-cp38-musllinux_1_2_i686.whl
- Upload date:
- Size: 1.5 MB
- Tags: CPython 3.8, musllinux: musl 1.2+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d695520726243e8098ffeed3dc7ecaedbd49c08c8dd436033ef4baeceaa0b466
|
|
| MD5 |
b15f0eec54e5d22aacd6131e38a5c34f
|
|
| BLAKE2b-256 |
2f976b4ae94c543a7f1384573df495a815c51f4adc27adcbf3776d1303e2493a
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp38-cp38-musllinux_1_2_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp38-cp38-musllinux_1_2_i686.whl -
Subject digest:
d695520726243e8098ffeed3dc7ecaedbd49c08c8dd436033ef4baeceaa0b466 - Sigstore transparency entry: 161390927
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp38-cp38-manylinux2010_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp38-cp38-manylinux2010_x86_64.whl
- Upload date:
- Size: 1.3 MB
- Tags: CPython 3.8, manylinux: glibc 2.12+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
0c6abd828fc7e4db2305e933e786b9af58ecc8069828c1028895913c2e7b0125
|
|
| MD5 |
c3fad06377ec2aca4fcfec8a10dd7e26
|
|
| BLAKE2b-256 |
b55551b484da9826eb646be0921325684f855ae98b27be3c65fcd39c9380e3c8
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp38-cp38-manylinux2010_x86_64.whl:
Publisher:
wheel_builder_python_3.8_or_older.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp38-cp38-manylinux2010_x86_64.whl -
Subject digest:
0c6abd828fc7e4db2305e933e786b9af58ecc8069828c1028895913c2e7b0125 - Sigstore transparency entry: 267160730
- Sigstore integration time:
-
Permalink:
translearn/limits@57b69c8541df827bad446696b9ea3e345a4a12dc -
Branch / Tag:
refs/heads/python_3.8_or_older - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder_python_3.8_or_older.yml@57b69c8541df827bad446696b9ea3e345a4a12dc -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp38-cp38-manylinux2010_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp38-cp38-manylinux2010_i686.whl
- Upload date:
- Size: 1.2 MB
- Tags: CPython 3.8, manylinux: glibc 2.12+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
4d3080e8b3e8750d001715ece04bbb95d6b3a14359c213326c05319e4239c017
|
|
| MD5 |
8c338c29ac4adc6224ae0b8c01cec8e8
|
|
| BLAKE2b-256 |
9febe1562ab4d3d8804604bd2daa3d3c69105bee88cd7e7ce31242d2057de388
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp38-cp38-manylinux2010_i686.whl:
Publisher:
wheel_builder_python_3.8_or_older.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp38-cp38-manylinux2010_i686.whl -
Subject digest:
4d3080e8b3e8750d001715ece04bbb95d6b3a14359c213326c05319e4239c017 - Sigstore transparency entry: 267160697
- Sigstore integration time:
-
Permalink:
translearn/limits@57b69c8541df827bad446696b9ea3e345a4a12dc -
Branch / Tag:
refs/heads/python_3.8_or_older - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder_python_3.8_or_older.yml@57b69c8541df827bad446696b9ea3e345a4a12dc -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp37-cp37m-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp37-cp37m-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.4 MB
- Tags: CPython 3.7m, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
4f3e64bf8e3c2bcd37eb7279e10dc2b61e23e62526f051131cafb596715f911a
|
|
| MD5 |
f0385d43a5628b29bde8d8a272e9b479
|
|
| BLAKE2b-256 |
c70ed29fe6f6b00468a14196f1aa362a7f9a0e37017d05c3d4cc16e6158961f1
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp37-cp37m-musllinux_1_2_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp37-cp37m-musllinux_1_2_x86_64.whl -
Subject digest:
4f3e64bf8e3c2bcd37eb7279e10dc2b61e23e62526f051131cafb596715f911a - Sigstore transparency entry: 161390892
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp37-cp37m-musllinux_1_2_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp37-cp37m-musllinux_1_2_i686.whl
- Upload date:
- Size: 1.4 MB
- Tags: CPython 3.7m, musllinux: musl 1.2+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
bb61fa8e5e1031d0664961a8b34473d2997988b3d29586aa12b2f0f5678b54b5
|
|
| MD5 |
5c1f6e020b8cc42d61f025168d776b5f
|
|
| BLAKE2b-256 |
9d30d0b75f746edcbed54c82ac4644067d056bc6ec9975dc68f55e57809975f1
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp37-cp37m-musllinux_1_2_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp37-cp37m-musllinux_1_2_i686.whl -
Subject digest:
bb61fa8e5e1031d0664961a8b34473d2997988b3d29586aa12b2f0f5678b54b5 - Sigstore transparency entry: 161390905
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp37-cp37m-manylinux2010_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp37-cp37m-manylinux2010_x86_64.whl
- Upload date:
- Size: 1.2 MB
- Tags: CPython 3.7m, manylinux: glibc 2.12+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
26526eca62c281f698ff69e5b80e284b105e737c5c21b0dba60cd84d0cd1c686
|
|
| MD5 |
c73ad07eeb501284570941b12127233e
|
|
| BLAKE2b-256 |
396fa3ebef6db65a694c64d8a33ca02ab3a2e7b1c931285e03ed777652213482
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp37-cp37m-manylinux2010_x86_64.whl:
Publisher:
wheel_builder_python_3.8_or_older.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp37-cp37m-manylinux2010_x86_64.whl -
Subject digest:
26526eca62c281f698ff69e5b80e284b105e737c5c21b0dba60cd84d0cd1c686 - Sigstore transparency entry: 267160723
- Sigstore integration time:
-
Permalink:
translearn/limits@57b69c8541df827bad446696b9ea3e345a4a12dc -
Branch / Tag:
refs/heads/python_3.8_or_older - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder_python_3.8_or_older.yml@57b69c8541df827bad446696b9ea3e345a4a12dc -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp37-cp37m-manylinux2010_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp37-cp37m-manylinux2010_i686.whl
- Upload date:
- Size: 1.1 MB
- Tags: CPython 3.7m, manylinux: glibc 2.12+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
32ec777f09bc31083cb68e95fcc78f8100f91323d02c6544e844ccb0c54af1d9
|
|
| MD5 |
69cce86a8066edcb4aa59ae0722bf463
|
|
| BLAKE2b-256 |
c370846f3e561aede38bd34f30d14635026dfc806d011e3c6e294ef5396e49e3
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp37-cp37m-manylinux2010_i686.whl:
Publisher:
wheel_builder_python_3.8_or_older.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp37-cp37m-manylinux2010_i686.whl -
Subject digest:
32ec777f09bc31083cb68e95fcc78f8100f91323d02c6544e844ccb0c54af1d9 - Sigstore transparency entry: 267160707
- Sigstore integration time:
-
Permalink:
translearn/limits@57b69c8541df827bad446696b9ea3e345a4a12dc -
Branch / Tag:
refs/heads/python_3.8_or_older - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder_python_3.8_or_older.yml@57b69c8541df827bad446696b9ea3e345a4a12dc -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp36-cp36m-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp36-cp36m-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.4 MB
- Tags: CPython 3.6m, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
ff2cbc820a66162b6f5d7bf3097dc525bacb6b17c1a713bc3d7a8e699860ffbb
|
|
| MD5 |
bf1c59a5984b947b63cb0c25aad733d3
|
|
| BLAKE2b-256 |
df8d4500d0679ec906302dd64765f8ad72da8ad763d795d462b2abc57eda4460
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp36-cp36m-musllinux_1_2_x86_64.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp36-cp36m-musllinux_1_2_x86_64.whl -
Subject digest:
ff2cbc820a66162b6f5d7bf3097dc525bacb6b17c1a713bc3d7a8e699860ffbb - Sigstore transparency entry: 161390893
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp36-cp36m-musllinux_1_2_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp36-cp36m-musllinux_1_2_i686.whl
- Upload date:
- Size: 1.4 MB
- Tags: CPython 3.6m, musllinux: musl 1.2+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.0.1 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
c67747b5485ed7a5c3ef25560a9b1490665cfd3d58454737a7822f6d27bc6149
|
|
| MD5 |
c17f823036b2910c51c736d872a4d190
|
|
| BLAKE2b-256 |
fe22e92fed41ef523570f2cea52678d872006e215e2fa5eec36074da755b97ff
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp36-cp36m-musllinux_1_2_i686.whl:
Publisher:
wheel_builder.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp36-cp36m-musllinux_1_2_i686.whl -
Subject digest:
c67747b5485ed7a5c3ef25560a9b1490665cfd3d58454737a7822f6d27bc6149 - Sigstore transparency entry: 161390913
- Sigstore integration time:
-
Permalink:
translearn/limits@b1d0428d85d55f6b350262e04f119d4589655d92 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder.yml@b1d0428d85d55f6b350262e04f119d4589655d92 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp36-cp36m-manylinux2010_x86_64.whl.
File metadata
- Download URL: klimits-1.1.3-cp36-cp36m-manylinux2010_x86_64.whl
- Upload date:
- Size: 1.2 MB
- Tags: CPython 3.6m, manylinux: glibc 2.12+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
fb8e0033b24f3f2433046ea874bb36971de65c4d539617cb83dbaa9508496b05
|
|
| MD5 |
0f6f2ba1527a202bb9954bfd6ad8e599
|
|
| BLAKE2b-256 |
ee9ad9e689df8014829ebe70c12fd75dadcfe42a6fdf45c3f484398776433181
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp36-cp36m-manylinux2010_x86_64.whl:
Publisher:
wheel_builder_python_3.8_or_older.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp36-cp36m-manylinux2010_x86_64.whl -
Subject digest:
fb8e0033b24f3f2433046ea874bb36971de65c4d539617cb83dbaa9508496b05 - Sigstore transparency entry: 267160739
- Sigstore integration time:
-
Permalink:
translearn/limits@57b69c8541df827bad446696b9ea3e345a4a12dc -
Branch / Tag:
refs/heads/python_3.8_or_older - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder_python_3.8_or_older.yml@57b69c8541df827bad446696b9ea3e345a4a12dc -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file klimits-1.1.3-cp36-cp36m-manylinux2010_i686.whl.
File metadata
- Download URL: klimits-1.1.3-cp36-cp36m-manylinux2010_i686.whl
- Upload date:
- Size: 1.1 MB
- Tags: CPython 3.6m, manylinux: glibc 2.12+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
b5b6face9f92c0c8a793e41cf205bd7bbfd0775d9bb93210aa8a651b932560a7
|
|
| MD5 |
82b4e5114cc20417fd84799bf61db351
|
|
| BLAKE2b-256 |
a3748173be6c2df6189e6b64d4034b08eaef63e73476fc5d680e852aa87639f5
|
Provenance
The following attestation bundles were made for klimits-1.1.3-cp36-cp36m-manylinux2010_i686.whl:
Publisher:
wheel_builder_python_3.8_or_older.yml on translearn/limits
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
klimits-1.1.3-cp36-cp36m-manylinux2010_i686.whl -
Subject digest:
b5b6face9f92c0c8a793e41cf205bd7bbfd0775d9bb93210aa8a651b932560a7 - Sigstore transparency entry: 267160715
- Sigstore integration time:
-
Permalink:
translearn/limits@57b69c8541df827bad446696b9ea3e345a4a12dc -
Branch / Tag:
refs/heads/python_3.8_or_older - Owner: https://github.com/translearn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
wheel_builder_python_3.8_or_older.yml@57b69c8541df827bad446696b9ea3e345a4a12dc -
Trigger Event:
workflow_dispatch
-
Statement type:







