Xiaohu Lu's Vanishing Point Detection algorithm

Project description
XiaohuLuVPDetection
This is a Python + OpenCV implementation of the Vanishing Point algorithm by Xiaohu Lu et al. - http://xiaohulugo.github.io/papers/Vanishing_Point_Detection_WACV2017.pdf
Requirements
- Python >= 3.8
- OpenCV Contrib 4.x
- NumPy
Setup
Method #1 - Cloning this repo and installing locally
Simply clone this repo, then run the included setup.py file to get it to install onto your local machine:
$ python setup.py build
$ python setup.py install
Method #2 - Through PyPI
This project is now available through PyPI: https://pypi.org/project/lu-vp-detect/
If don't want to clone this repo, you can simply use pip install to install this project on your system.
$ pip install lu-vp-detect
After installation
The lu_vp_detect package should be installed at this point which will
contain the implementation of the algorithm as well as a command-line test
script to test out the algorithm.
How to use
The main detection algorithm is written in the lu_vp_detect package and is
implemented in the file vp_detection.py. The VPDetection class is what
is required and there are two methods of interest in the class:
find_vps: Finds the vanishing points in normalized 3D spacecreate_debug_VP_image: Creates a debug image for showing which detected lines in the image align with each vanishing point.
The main parameters for affecting performance are:
length_thresh: The minimum length of the lines detected to find the vanishing pointsprincipal_point: The principal point of the camera that took the image (in pixels). The default is to assume the image centre.focal_length: The focal length of the camera (in pixels). The default is 1500.seed: An optional integer ID that specifies the seed for reproducibility as part of the algorithm uses RANSAC. Default isNoneso no seed is used.
Simply create a VPDetection object with the desired parameters and run the
detection algorithm with the desired image. You can read in the image yourself
or you can provide a path to the image. Note that the returned vanishing
points will be a 3 x 3 NumPy array such that the first row corresponds to the
vanishing point appearing to the right of the image, the second row
corresponds to the vanishing point appearing to the left of the image and the
last row corresponding to the vertical vanishing point:
from lu_vp_detect import VPDetection
length_thresh = ... # Minimum length of the line in pixels
principal_point = (...,...) # Specify a list or tuple of two coordinates
# First value is the x or column coordinate
# Second value is the y or row coordinate
focal_length = ... # Specify focal length in pixels
seed = None # Or specify whatever ID you want (integer)
vpd = VPDetection(length_thresh, principal_point, focal_length, seed)
img = '...' # Provide a path to the image
# or you can read in the image yourself
# img = cv2.imread(path_to_image, -1)
# Run detection
vps = vpd.find_vps(img)
# Display vanishing points
print(vps)
# You can also access the VPs directly as a property
# Only works when you run the algorithm first
# vps = vpd.vps
# You can also access the image coordinates for the vanishing points
# Only works when you run the algorithm first
# vps_2D = vpd.vps_2D
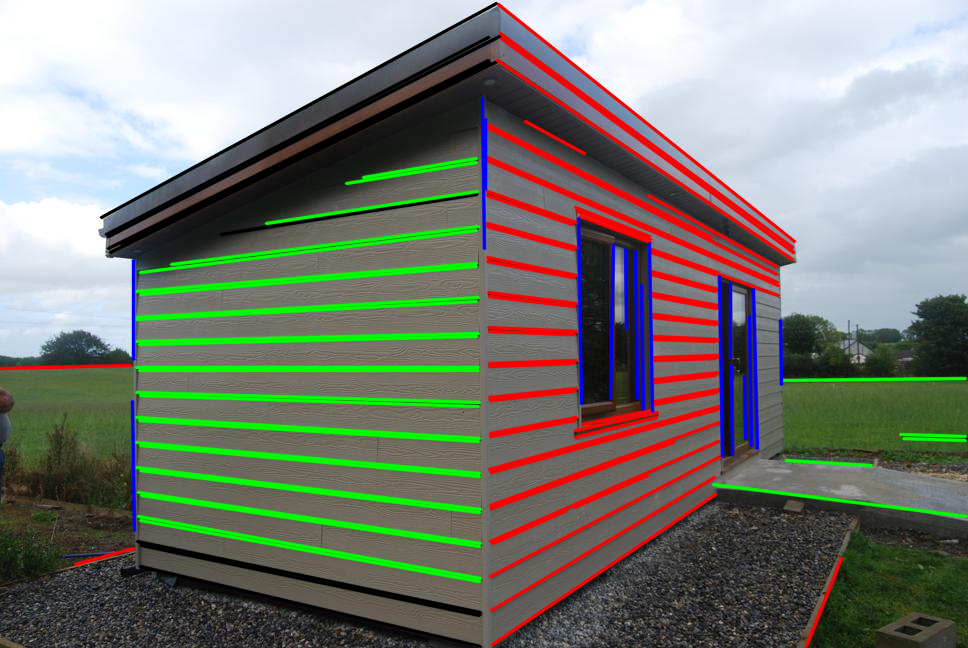
You can optionally create a debug image that shows which detected lines align with which vanishing point in the image. They are colour coded so that each unique colour corresponds to the lines that provide support for a vanishing point. Lines that are black correspond to "outlier" lines, meaning that they did not contribute any information in calculating any vanishing points.
# Create debug image
vpd.create_debug_VP_image(show_image=True, save_image='./path/to/debug.png')
The show_image flag will open a OpenCV imshow window that will display the
image. The save_image if it's not set to None will write the corresponding
image to file. Of course, different combinations of the input variables will
allow you to customize what outputs you want to consume or save.
Command-line test script
The run_vp_detect.py file is a command-line script that uses argparse to
take in the parameters from the command-line, runs the algorithm and shows
the vanishing points in both 3D normalised space and 2D image coordinate space
in the console. You can additionally show the debug image and save the debug
image to file by setting the right parameters.
$ run_vp_detect -h
usage: run_vp_detect [-h] -i IMAGE_PATH [-lt LENGTH_THRESH]
[-pp PRINCIPAL_POINT PRINCIPAL_POINT] [-f FOCAL_LENGTH]
[-d] [-ds] [-dp DEBUG_PATH] [-s SEED]
Main script for Lu's Vanishing Point Algorithm
optional arguments:
-h, --help show this help message and exit
-i IMAGE_PATH, --image-path IMAGE_PATH
Path to the input image
-lt LENGTH_THRESH, --length-thresh LENGTH_THRESH
Minimum line length (in pixels) for detecting lines
-pp PRINCIPAL_POINT PRINCIPAL_POINT, --principal-point PRINCIPAL_POINT PRINCIPAL_POINT
Principal point of the camera (default is image
centre)
-f FOCAL_LENGTH, --focal-length FOCAL_LENGTH
Focal length of the camera (in pixels)
-d, --debug Turn on debug image mode
-ds, --debug-show Show the debug image in an OpenCV window
-dp DEBUG_PATH, --debug-path DEBUG_PATH
Path for writing the debug image
-s SEED, --seed SEED Specify random seed for reproducible results
Take note that the principal point requires two arguments so you can
separate the x and y coordinate by a space.
Example running of the script
A sample image was extracted from TinyHomes.ie,
specifically this image: https://www.tinyhomes.ie/wp-content/uploads/2015/09/02.jpg.
It is saved as test_image.jpg in this repository.
The image has been reduced down to 1/4 of the resolution for ease.
The new image has dimensions of 968 x 648. The image was originally
taken with a Nikon D40X whose focal length is 18 mm and the CCD width is
15.8 mm. Therefore, the estimated focal length should be:
968 x (18 / 15.8) = 1102.79 pixels
To test the algorithm and reproduce the results below, set the seed to be 1337 and set the minimum line length to be 60 pixels. Also, set the focal length to be what was computed above. The principal point is assumed to be the centre of the image.
$ run_vp_detect -i ./test_image.jpg -f 1102.79 -s 1337 -ds -lt 60
For completeness, to do this programmatically:
from lu_vp_detect import VPDetection
length_thresh = 60
principal_point = None
focal_length = 1102.79
seed = 1337
img = './test_image.jpg'
vpd = VPDetection(length_thresh, principal_point, focal_length, seed)
vps = vpd.find_vps(img)
print(vps)
We get the following output and debug image:
Input path: ./test_image.jpg
Seed: 1337
Line length threshold: 60.0
Focal length: 1102.79
Principal point: [484. 324.]
The vanishing points in 3D space are:
Vanishing Point 1: [0.3774699 0.01993015 0.92580736]
Vanishing Point 2: [-0.9260219 0.00812403 0.37738246]
Vanishing Point 3: [-0. -0.9997684 0.02152233]
The vanishing points in image coordinates are:
Vanishing Point 1: [933.6292 347.7401]
Vanishing Point 2: [-2222.0286 347.7401]
Vanishing Point 3: [ 484. -50903.473]
Creating debug image and showing to the screen
License
This code is currently distributed under the MIT license. Please modify and use the code as you see fit. I only ask that you not only include this license as part of your work but to please acknowledge where you got this work from!
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file lu_vp_detect-1.0.4.tar.gz.
File metadata
- Download URL: lu_vp_detect-1.0.4.tar.gz
- Upload date:
- Size: 15.5 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.2 CPython/3.9.13
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
14906215d03cf8646d11f6a20b084ba0de1a80b4ce76071685facd3d40774358
|
|
| MD5 |
2a35d7596faf948a1f06dc50d622e507
|
|
| BLAKE2b-256 |
58b35823136966961d42a93a05a738281a8d0debfb80084bf414455b6261714f
|
File details
Details for the file lu_vp_detect-1.0.4-py3-none-any.whl.
File metadata
- Download URL: lu_vp_detect-1.0.4-py3-none-any.whl
- Upload date:
- Size: 13.3 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.2 CPython/3.9.13
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
581785f88b75f59dc63329194eea5e510ebdbcc0ad3d6d9e6be160af0781ee43
|
|
| MD5 |
cdf97be6648c81ebde99cd4699286c1b
|
|
| BLAKE2b-256 |
bec0a589b774dd87c942bf13b331e8bdcd71776e7e97d2ea98fa6e20f6f1c74a
|








{kind=link}