Muscle rigged models and environments for machine learning experiments.

Project description
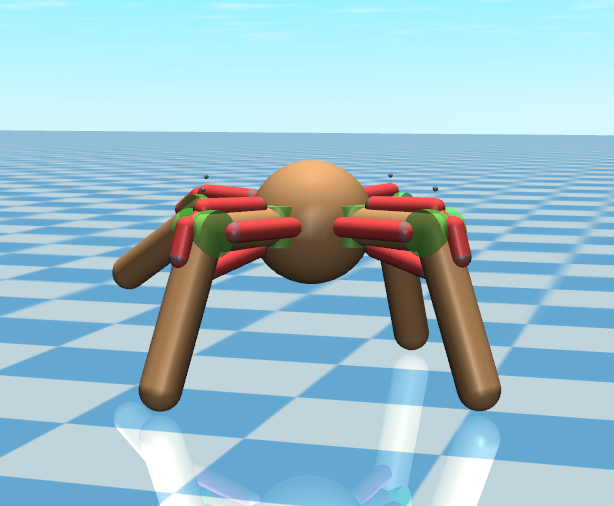
MuscledAgents
OpenAI Gym MuJoCo environments rigged with muscles which can be used with PyMuscle fatigable muscle models.
Prerequisites
- MuJoCo 1.5
- mujoco-py
- gym
Setup
python setup.py develop
Usage
import gym
import muscledagents
import math
def main():
# Load a muscled ant
env = gym.make("MuscledAnt-v0") # Only functional env at the moment
env.reset()
print("Observation Space Dims", env.observation_space.shape)
print("Action Space Dims", env.action_space.shape)
action_size = env.action_space.shape[0]
action = [0.0] * action_size
total_steps = 60 * 10
for i in range(total_steps):
action[1] = ((math.sin(i / 25) + 1) / 2)
action[5] = ((math.sin(i / 35) + 1) / 2)
action[9] = ((math.sin(i / 45) + 1) / 2)
action[13] = ((math.sin(i / 55) + 1) / 2)
env.step(action)
env.render()
if __name__ == '__main__':
main()
To explore these environments and models further you will need to understand how input values get translated into final simulated movements.
Control Signals
The action space for an ant is continuous control over 16 muscles. For each of four legs there are four muscles. One leg extensor, one leg flexor, and two hip muscles which move the leg left and right (or forward and back depending on your perspective.)
Gym Environment
The step method takes an array of 16 values which represent the input to
the fatigable muscle model for each muscle. Inputs should be in the range [0-1].
PyMuscle Fatigue
After use muscles produce less force for the same level of input. So if you were to send an input signal which recruited all motor units in a muscle constantly for several seconds the output the model will return will rapidly decrease. A period of light or no use is required for the muscle to recover.
MuJoCo Model
Each tendon actuator is control limited to the range [-1.0, 0.0]. When a General actuator is tied to a Tendon in MuJoCo negative values are the equivalent of contractions. Muscles cannot produce force in extension so no positive non-zero values are allowed.
Actuators have a gainprm which scales this input value. This is tuned to
a value of 100 to work with the mass of the ant and the resistances of opposing
tendons.
Altering the Models
Due to frustration editing XML files the ant model is generated by a python
script that uses the mjcf library which
I wrote to wrap MuJoCo xml elements in python classes. Note: This may
be replaced with the mjcf library from dm_control in the future.
You can view and modify that script in scripts/gen_ant.py.
Release history Release notifications | RSS feed

Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file muscledagents-0.0.2.tar.gz.
File metadata
- Download URL: muscledagents-0.0.2.tar.gz
- Upload date:
- Size: 9.6 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/1.12.1 pkginfo/1.5.0.1 requests/2.19.1 setuptools/40.0.0 requests-toolbelt/0.8.0 tqdm/4.29.0 CPython/3.6.5
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
751a2c761e9116851e5e41e18a4ae4874714f7eafc53daa7b0794540bacc7882
|
|
| MD5 |
bbf7306a2952b5c2c5cf0f09e4d446b2
|
|
| BLAKE2b-256 |
e3e59d86ab638449ed13f6d628c536095702a89a4dab6d9a30214561b75e06db
|
File details
Details for the file muscledagents-0.0.2-py2.py3-none-any.whl.
File metadata
- Download URL: muscledagents-0.0.2-py2.py3-none-any.whl
- Upload date:
- Size: 11.6 kB
- Tags: Python 2, Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/1.12.1 pkginfo/1.5.0.1 requests/2.19.1 setuptools/40.0.0 requests-toolbelt/0.8.0 tqdm/4.29.0 CPython/3.6.5
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
fe54b7dbe8cc5b0795e1d204efb09e59e92719ded387bf6db00ce9b2ce9fb880
|
|
| MD5 |
1035a446d7a1ebda369e0b1d3afb8113
|
|
| BLAKE2b-256 |
20af06ec09e21a5f79ab4d1eedc8eff35bb508723b536472e2a7f2e88db700ed
|







