Estimate scale, rotation, and translation between two sets of 2D points e.g. for multi-touch gestures or calibration

Project description
A Python lib to estimate scale, rotation, and translation between two sets of 2D points. Applicable for example in cases where one wants to move objects by multiple fingers or where a large number of points from an eye tracker device are wanted to be corrected based on a few calibration points. In general, you can apply nudged in any situation where you want to move a number of points based on a few sample points.
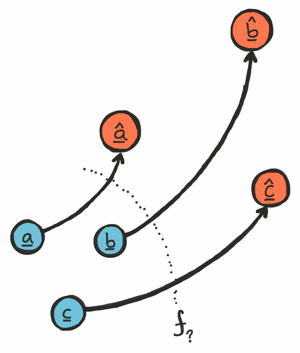
Mathematically speaking, nudged is an optimal least squares estimator for affine transformation matrices with uniform scaling, rotation, and translation and without reflection or shearing. The estimation has time complexity of O(n) that consists of 6n+22 multiplications and 11n+19 additions, where n is the cardinality (size) of the point sets. In other words, nudged solves an affine 2D to 2D point set registration problem in linear time.
Available also in JavaScript.
Install
$ pip install nudged
Usage
You have lists of points for the domain and range of the tranformation function to be estimated:
dom = [[0,0], [2,0], [ 1,2]] ran = [[1,1], [1,3], [-1,2]]
Compute optimal tranformation based on the points:
trans = nudged.estimate(dom, ran);
Apply the transformation to other points:
trans.transform([2,2]) # [-1,3]
To explore the estimated transformation, you can:
trans.get_matrix() # [[0,-1, 1], # [1, 0, 1], # [0, 0, 1]] trans.get_rotation() # 1.5707... = π / 2 (radians) trans.get_scale() # 1.0 trans.get_translation() # [1, 1]
API
nudged.estimate(domain, range)
Parameters
domain: list of [x,y] points
range: list of [x,y] points
The domain and range should have equal length. Different lengths are allowed but additional points in the longer list are ignored.
Return a new nudged.Transform(…) instance.
nudged.estimate_error(transform, domain, range)
Compute mean squared distance between the point pairs of the domain after the given transformation and the range. If the transform was estimated with the given domain and range, then the result is the mean squared error (MSE) of the estimation.
Parameters
transform: a nudged.Transform instance
domain: list of [x,y] points
range: list of [x,y] points
Return a float, the mean squared distance between the range and transformed domain point pairs.
Usage example:
dom = [[0, 0], [1, 1], [2, 2]] ran = [[0,-1], [1, 2], [2,-1]] t = nudged.estimate(dom, ran) mse = nudged.estimate_error(t, dom, ran) # mse == 2.0
nudged.version
Contains the module version string equal to the version in setup.py.
nudged.Transform(s, r, tx, ty)
An instance returned by the nudged.estimate(…).
In addition to the methods below, it has attributes s, r, tx, ty that define the augmented transformation matrix:
|s -r tx| |r s ty| |0 0 1|
nudged.Transform#transform(points)
Return an list of transformed points or single point if only a point was given. For example:
trans.transform([1,1]) # [2,2] trans.transform([[1,1]]) # [[2,2]] trans.transform([[1,1], [2,3]]) # [[2,2], [3,4]]
nudged.Transform#get_matrix()
Return an 3x3 augmented transformation matrix in the following list format:
[[s,-r, tx], [r, s, ty], [0, 0, 1]]
nudged.Transform#get_rotation()
Return rotation in radians.
nudged.Transform#get_scale()
Return scaling multiplier, e.g. 0.333 for a threefold shrink.
nudged.Transform#get_translation()
Return [tx, ty] where tx and ty denotes movement along x-axis and y-axis accordingly.
For developers
Follow instructions to install pyenv <http://sqa.stackexchange.com/a/15257/14918>`_ and then either run quick tests:
$ python2.7 setup.py test
or comprehensive tests for multiple Python versions in tox.ini:
$ eval "$(pyenv init -)" $ pyenv rehash $ tox
Versioning
License
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file nudged-0.3.1.tar.gz.
File metadata
- Download URL: nudged-0.3.1.tar.gz
- Upload date:
- Size: 5.8 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
7f576dcaab3c559171185de067c45469846a3c6cd00792e85bb4b603bb72bec5
|
|
| MD5 |
6f5feaea0927da774cc459ae17c2f065
|
|
| BLAKE2b-256 |
77f10aab175d8666c72627235dadd3955683c96aea954e8d2bdbeb3030cec077
|
File details
Details for the file nudged-0.3.1-py2.py3-none-any.whl.
File metadata
- Download URL: nudged-0.3.1-py2.py3-none-any.whl
- Upload date:
- Size: 8.0 kB
- Tags: Python 2, Python 3
- Uploaded using Trusted Publishing? No
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
9029a7b8c27e3e5af9d7e12f5f55b51b5d51799a72aee3e53408ce68e607ec63
|
|
| MD5 |
1a1f80b144baab0177b132a37f5eb1cd
|
|
| BLAKE2b-256 |
5a731ac27893feda9773ed1c2d26521d0d5e67fe30df7acad81ef0142945297a
|







