An OpenCV camera library

Project description
OpenCV Camera






Simple threaded camera and calibration code using OpenCV. This tries to simplify some things
Install
The preferred way to install is using pip:
pip install opencv_camera
Usage
See the jupyter notebooks under the docs in the repository for some examples.
Online nbviewer
Colorspace
Change between common colorspaces with:
bgr2gray(image)gray2bgr(image)bgr2rgb(image)rgb2bgr(image)bgr2hsv(image)hsv2bgr(image)
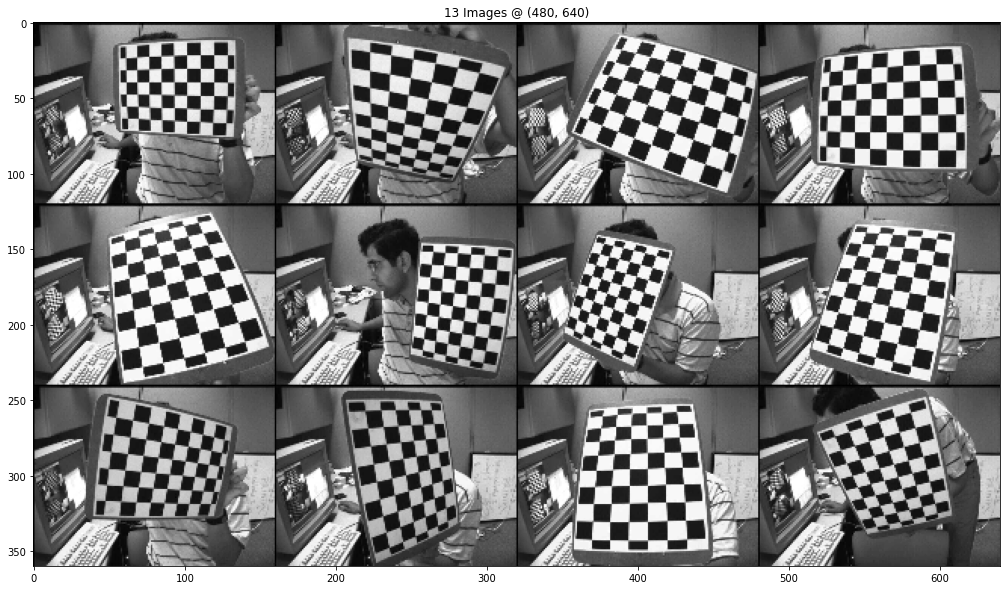
Calibration
Create a mosaic of input calibration images with mosaic(images, width)
Calibrate a camera with:
calibrator = CameraCalibration()
board = ChessboardFinder((9,6), 1)
cam, cal = calibrator.calibrate(images, board)
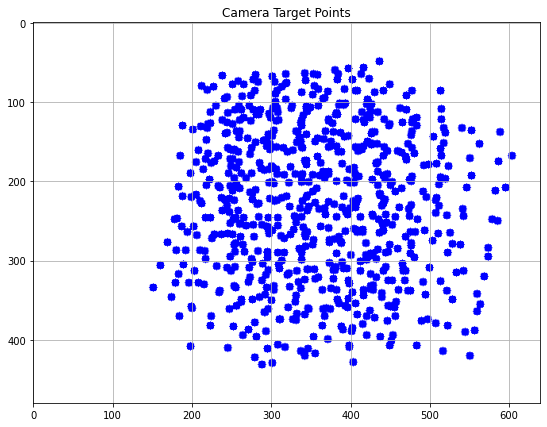
Display all of the found image points with coverage((width, height), imagePoints)
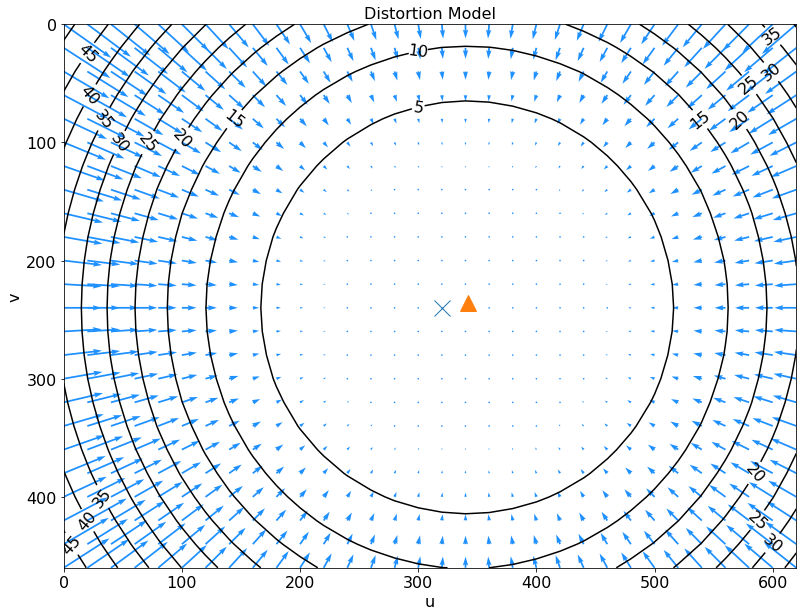
Distortion
Use the found calibration parameters to undistort an image:
un = UnDistort(cameraMatrix, distortionCoeff, w, h)
corr_img = un.undistort(image)
Visualize the lens distortion with:
visualizeDistortion(cameraMatrix, distortCoeff, height, width)
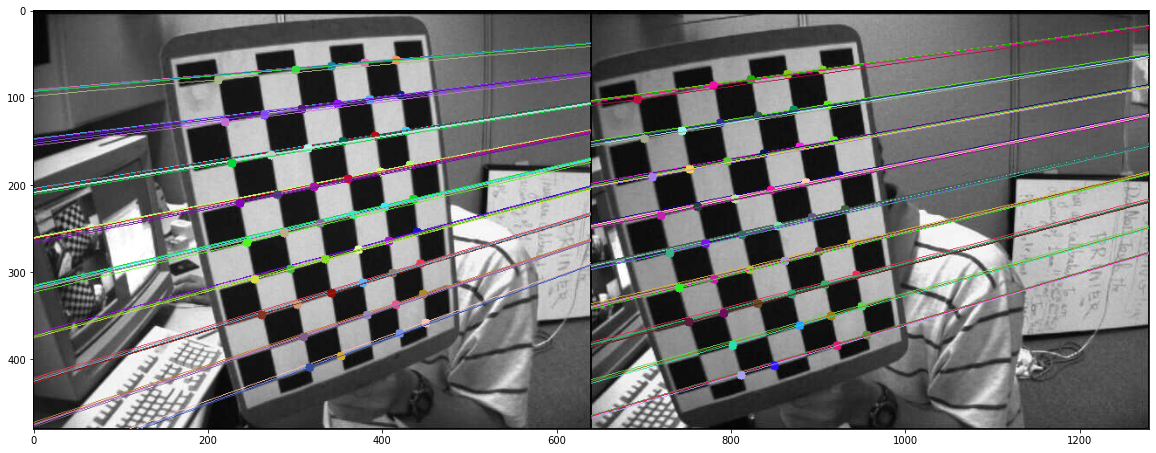
Stereo
Calibrate a stereo camera with:
stereoCal = StereoCalibration()
board = ChessboardFinder((9,6), 1)
ok, cm, sc = stereoCal.calibrate(imgL, imgR, board)
Draw epipolar lines in stereo images with drawEpipolarLines(imgpointsL,imgpointsR,imgL,imgR)
Apps
Use program --help to display switches for each of the following:
opencv_calibrate: calibrate a cameraopencv_capture: simple tool to capture and save imagesopencv_mjpeg: sets up a simple jmpeg server so you can view images in a web browserudp_server x.x.x.x: sends camera images via UDPudp_client x.x.x.x: displays UDP camera images from server
ToDo
- Remoded
apriltagcalibration, moved tomoms_apriltaglibrary - Add pointcloud from stereo
- Add parameters for known cameras
- Add Jupyter notebook documentation and examples
- Simplify stereo camera
- Add
computeReprojectionErrorsandvisualizeReprojErrors - Add
visualizeDistortion - Add
visualizeExtrinsics - Remove
attrs, replaced with python'sdataclass - Add save/load from
yaml - Add stereo calibration
pytest
Change Log
| Date | Version | Notes |
|---|---|---|
| 2022.12.23 | changed version number to match date, changed to opencv-contrib-python |
|
| 2020-12-27 | 0.10.10 | added distortion and reprojection display |
| 2020-09-15 | 0.10.8 | added known camera params and general cleanup |
| 2020-08-24 | 0.10.6 | added UDP image server and client |
| 2020-07-03 | 0.10.2 | renamed and focused on camera |
| 2018-07-19 | 0.9.4 | simple clean-up and updating some things |
| 2017-10-29 | 0.9.3 | bug fixes |
| 2017-04-09 | 0.9.0 | initial python 3 support |
| 2017-03-31 | 0.7.0 | refactored and got rid of things I do not need |
| 2017-01-29 | 0.6.0 | added video capture (video and images) program |
| 2016-12-30 | 0.5.3 | typo fix |
| 2016-12-30 | 0.5.1 | refactored |
| 2016-12-11 | 0.5.0 | published to PyPi |
| 2014-3-11 | 0.2.0 | started |
MIT License
Copyright (c) 2014 Kevin J. Walchko
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file opencv_camera-2023.1.7.tar.gz.
File metadata
- Download URL: opencv_camera-2023.1.7.tar.gz
- Upload date:
- Size: 28.3 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/1.3.1 CPython/3.10.9 Darwin/21.6.0
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
92b2aa6e8e12b85974dc0d5cd085aed850a2d1929bcce674a5d6c1f5a773eda5
|
|
| MD5 |
c1897eb528b2a45a8ff07b1b06efe48e
|
|
| BLAKE2b-256 |
d84d5f4ab565c6baca4efb0703ebe34d32f223cc629e9d3fa9d584e0b9fc8223
|
File details
Details for the file opencv_camera-2023.1.7-py3-none-any.whl.
File metadata
- Download URL: opencv_camera-2023.1.7-py3-none-any.whl
- Upload date:
- Size: 40.8 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/1.3.1 CPython/3.10.9 Darwin/21.6.0
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
31c0be953eaa0ff20b12058e791e8fdbf3387279a9f2597e8504626ef65f6876
|
|
| MD5 |
f68ff72a9ef654e72c78a4da212eafdd
|
|
| BLAKE2b-256 |
b2626fd3aaaf37684c7de828d4426d99e8c096df51c949c1c3ffe534b20f863b
|







