Python binding for odeint from boost.

Project description





pyodeint provides a Python binding to odeint. Currently, the following steppers are exposed:
rosenbrock4: 4th order Rosenbrock (implicit multistep) stepper
dopri5: 5th order DOPRI5 (explicit runge-kutta)
bs: Bulirsch-Stoer stepper (modified midpoint rule).
The Rosenbrock4 stepper requires that the user provides a routine for calculating the Jacobian.
You may also want to know that you can use pyodeint from pyodesys which can e.g. derive the Jacobian analytically for you (pyodesys also provides plotting functions, C++ code-generation and more).
Documentation
Autogenerated API documentation for latest stable release is found here: https://bjodah.github.io/pyodeint/latest (and the development version for the current master branch are found here: http://hera.physchem.kth.se/~pyodeint/branches/master/html).
Installation
Simplest way to install is to use the conda package manager:
$ conda install -c conda-forge pyodeint pytest $ python -m pytest --pyargs pyodeint
tests should pass.
Binary distribution is available here: https://anaconda.org/bjodah/pyodeint
Source distribution is available here: https://pypi.python.org/pypi/pyodeint
here is an example of how to build from source:
$ CPATH=/opt/boost_1_65_0/include python3 setup.py build_ext -i
Examples
The classic van der Pol oscillator (see examples/van_der_pol.py)
>>> from pyodeint import integrate_adaptive # also: integrate_predefined
>>> mu = 1.0
>>> def f(t, y, dydt):
... dydt[0] = y[1]
... dydt[1] = -y[0] + mu*y[1]*(1 - y[0]**2)
...
>>> def j(t, y, Jmat, dfdt, fy=None):
... Jmat[0, 0] = 0
... Jmat[0, 1] = 1
... Jmat[1, 0] = -1 -mu*2*y[1]*y[0]
... Jmat[1, 1] = mu*(1 - y[0]**2)
... dfdt[0] = 0
... dfdt[1] = 0
...
>>> y0 = [1, 0]; tend=10.0; dt0=1e-8; t0=0.0; atol=1e-8; rtol=1e-8
>>> tout, yout, info = integrate_adaptive(f, j, y0, t0, tend, dt0, atol, rtol,
... method='rosenbrock4', nsteps=1000)
>>> import matplotlib.pyplot as plt
>>> series = plt.plot(tout, yout)
>>> plt.show() # doctest: +SKIP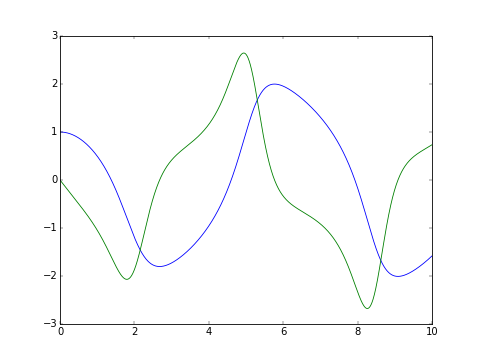
For more examples see examples/, and rendered jupyter notebooks here: http://hera.physchem.kth.se/~pyodeint/branches/master/examples
See also
pyodesys for how to automatically generate the jacobian callback function (and easily swtich to other solvers).
License
The source code is Open Source and is released under the very permissive “simplified (2-clause) BSD license”. See LICENSE for further details. Contributors are welcome to suggest improvements at https://github.com/bjodah/pyodeint
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
File details
Details for the file pyodeint-0.10.10.tar.gz.
File metadata
- Download URL: pyodeint-0.10.10.tar.gz
- Upload date:
- Size: 220.5 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.13.5
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
78fc9369d68e46ebf35d79cfde9d673f8dbe43b61e102397c3ff7e7d5d9f4781
|
|
| MD5 |
0435af1e5f87f5659c9145e5415bc1fb
|
|
| BLAKE2b-256 |
81f2222d8c50ab6727e55c034f958df20f5314b0e5903bd4ef5b5d35ae6d020d
|







