Python implementation of Priority R-Tree

Project description
python_prtree
python_prtree is a python/c++ implementation of the Priority R-Tree (see references below), an alternative to R-Tree. The supported futures are as follows:
- Construct a Priority R-Tree (PRTree) from an array of rectangles.
PRTree2D,PRTree3DandPRTree4D(2D, 3D and 4D respectively)
insertanderase- The
insertmethod can be passed pickable Python objects instead of int64 indexes.
- The
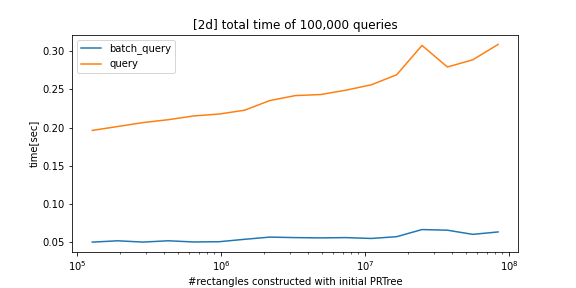
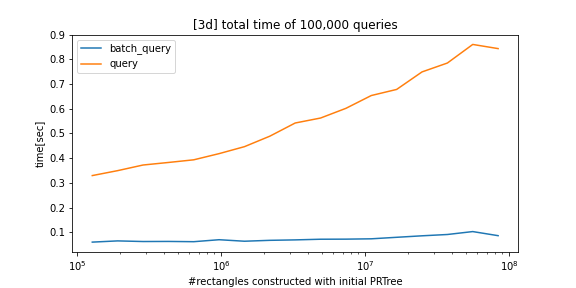
queryandbatch_querybatch_queryis parallelized bystd::threadand is much faster than thequerymethod.- The
querymethod has an optional keyword argumentreturn_obj; ifreturn_obj=True, a Python object is returned.
rebuild- It improves performance when many insert/delete operations are called since the last rebuild.
- Note that if the size changes more than 1.5 times, the insert/erase method also performs
rebuild.
This package is mainly for mostly static situations where insertion and deletion events rarely occur.
Installation
You can install python_prtree with the pip command:
pip install python-prtree
If the pip installation does not work, please git clone clone and install as follows:
pip install -U cmake pybind11
git clone --recursive https://github.com/atksh/python_prtree
cd python_prtree
python setup.py install
Examples
import numpy as np
from python_prtree import PRTree2D
idxes = np.array([1, 2])
# rects is a list of (xmin, ymin, xmax, ymax)
rects = np.array([[0.0, 0.0, 1.0, 0.5],
[1.0, 1.5, 1.2, 3.0]])
prtree = PRTree2D(idxes, rects)
# batch query
q = np.array([[0.5, 0.2, 0.6, 0.3],
[0.8, 0.5, 1.5, 3.5]])
result = prtree.batch_query(q)
print(result)
# [[1], [1, 2]]
# You can insert an additional rectangle by insert method,
prtree.insert(3, np.array([1.0, 1.0, 2.0, 2.0]))
q = np.array([[0.5, 0.2, 0.6, 0.3],
[0.8, 0.5, 1.5, 3.5]])
result = prtree.batch_query(q)
print(result)
# [[1], [1, 2, 3]]
# Plus, you can erase by an index.
prtree.erase(2)
result = prtree.batch_query(q)
print(result)
# [[1], [1, 3]]
# Non-batch query is also supported.
print(prtree.query([0.5, 0.5, 1.0, 1.0]))
# [1, 3]
# Point query is also supported.
print(prtree.query([0.5, 0.5]))
# [1]
print(prtree.query(0.5, 0.5)) # 1d-array
# [1]
import numpy as np
from python_prtree import PRTree2D
objs = [{"name": "foo"}, (1, 2, 3)] # must NOT be unique but pickable
rects = np.array([[0.0, 0.0, 1.0, 0.5],
[1.0, 1.5, 1.2, 3.0]])
prtree = PRTree2D()
for obj, rect in zip(objs, rects):
prtree.insert(bb=rect, obj=obj)
# returns indexes genereted by incremental rule.
result = prtree.query((0, 0, 1, 1))
print(result)
# [1]
# returns objects when you specify the keyword argment return_obj=True
result = prtree.query((0, 0, 1, 1), return_obj=True)
print(result)
# [{'name': 'foo'}]
The 1d-array batch query will be implicitly treated as a batch with size = 1.
If you want 1d result, please use query method.
result = prtree.query(q[0])
print(result)
# [1]
result = prtree.batch_query(q[0])
print(result)
# [[1]]
You can also erase(delete) by index and insert a new one.
prtree.erase(1) # delete the rectangle with idx=1 from the PRTree
prtree.insert(3, np.array([0.3, 0.1, 0.5, 0.2])) # add a new rectangle to the PRTree
You can save and load a binary file as follows.
# save
prtree.save('tree.bin')
# load with binary file
prtree = PRTree('tree.bin')
# or defered load
prtree = PRTree()
prtree.load('tree.bin')
Note that cross-version compatibility is NOT guaranteed, so please reconstruct your tree when you update this package.
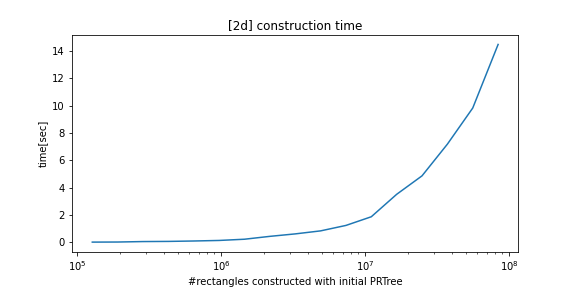
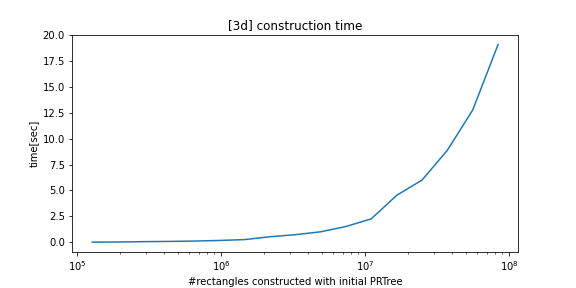
Performance
Construction
2d
3d
Query and batch query
2d
3d
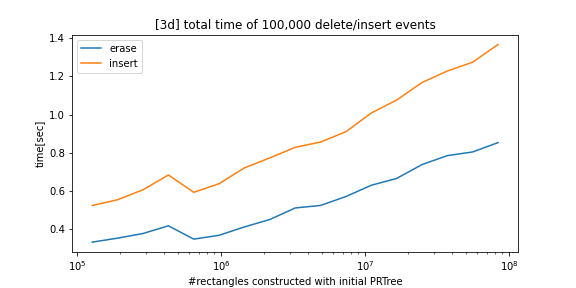
Delete and insert
2d

3d
New Features and Changes
python-prtree>=0.7.0
BREAKING CHANGES:
- Fixed critical intersection bug: Boxes with small gaps (< 1e-5) were incorrectly reported as intersecting due to float32 precision loss. Now uses precision-matching two-stage approach: float32 input → pure float32 performance, float64 input → float32 tree + double-precision refinement for correctness.
- Python version requirements: Minimum Python version is now 3.8 (dropped 3.6 and 3.7 due to pybind11 v2.13.6 compatibility). Added support for Python 3.13 and 3.14.
- Serialization format changed: Binary files saved with previous versions are incompatible with 0.7.0+. You must rebuild and re-save your trees after upgrading.
- Updated pybind11: Upgraded from v2.12.0 to v2.13.6 for Python 3.13+ support.
- Input validation: Added validation to reject NaN/Inf coordinates and enforce min <= max per dimension.
- Improved test coverage: Added comprehensive tests for edge cases including disjoint boxes with small gaps, touching boxes, large magnitude coordinates, and degenerate boxes.
Bug Fix Details:
The bug occurred when two bounding boxes were separated by a very small gap (e.g., 5.39e-06). When converted from float64 to float32, the values would collapse to the same float32 value, causing the intersection check to incorrectly report them as intersecting. This has been fixed by implementing a precision-matching approach: float32 input uses pure float32 for speed, while float64 input uses a two-stage filter-then-refine approach (float32 tree + double-precision refinement) for correctness.
python-prtree>=0.5.8
- The insert method has been improved to select the node with the smallest mbb expansion.
- The erase method now also executes rebuild when the size changes by a factor of 1.5 or more.
python-prtree>=0.5.7
- You can use PRTree4D.
python-prtree>=0.5.3
- Add compression for pickled objects.
python-prtree>=0.5.2
You can use pickable Python objects instead of int64 indexes for insert and query methods:
python-prtree>=0.5.0
- Changed the input order from (xmin, xmax, ymin, ymax, ...) to (xmin, ymin, xmax, ymax, ...).
- Added rebuild method to build the PRTree from scratch using the already given data.
- Fixed a bug that prevented insertion into an empty PRTree.
python-prtree>=0.4.0
- You can use PRTree3D:
Reference
The Priority R-Tree: A Practically Efficient and Worst-Case Optimal R-Tree Lars Arge, Mark de Berg, Herman Haverkort, and Ke Yi Proceedings of the 2004 ACM SIGMOD International Conference on Management of Data (SIGMOD '04), Paris, France, June 2004, 347-358. Journal version in ACM Transactions on Algorithms. author's page
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distributions
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file python_prtree-0.7.0.tar.gz.
File metadata
- Download URL: python_prtree-0.7.0.tar.gz
- Upload date:
- Size: 3.5 MB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
f3c2eafbd1b8e4ec57a11cb3bfbb9397d6e374a39351bffa7c13a4c40f2eeec3
|
|
| MD5 |
39c48fab5f05d0dedbfc9c03b5edc33e
|
|
| BLAKE2b-256 |
64e0e65ff0990014d2afec056bf5162c8914a7f740e71dbf377d1c9771302650
|
File details
Details for the file python_prtree-0.7.0-cp314-cp314-win_amd64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp314-cp314-win_amd64.whl
- Upload date:
- Size: 232.3 kB
- Tags: CPython 3.14, Windows x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
cbb08e51d129e23b767488d922788e7249ab8b12a833f9323fbaf6d09843ebf6
|
|
| MD5 |
669a8459948249d73cb67b9742deff6e
|
|
| BLAKE2b-256 |
fa380df0d4136d26c65fe0c5a9ce003705f8ab8f75a23082df7291b348b342dd
|
File details
Details for the file python_prtree-0.7.0-cp314-cp314-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp314-cp314-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.3 MB
- Tags: CPython 3.14, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
cd66a03bd6b7e884d9190ba69bb745dc6aba5191204ec724fa07febffa6cfb0d
|
|
| MD5 |
4820914e18d7ff4456137319f9be1b09
|
|
| BLAKE2b-256 |
8a25bb3c01848b49f87810b703e39fa4a71e2c7109a69c75ee8820b124ff23e0
|
File details
Details for the file python_prtree-0.7.0-cp314-cp314-musllinux_1_2_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp314-cp314-musllinux_1_2_aarch64.whl
- Upload date:
- Size: 1.2 MB
- Tags: CPython 3.14, musllinux: musl 1.2+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
82bd7c81426d30a21e7f84a3cccd55e0ed4c66e21c874351a235880d9e21e6b8
|
|
| MD5 |
e01a6ccc27d0902e8f455a995c47cf0d
|
|
| BLAKE2b-256 |
18b8bd4a45403ec6aaf2f6c74c408742b11380c8f2c76881cf182815ae60a4d5
|
File details
Details for the file python_prtree-0.7.0-cp314-cp314-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp314-cp314-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl
- Upload date:
- Size: 259.1 kB
- Tags: CPython 3.14, manylinux: glibc 2.27+ x86-64, manylinux: glibc 2.28+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
4aabcad2214fb54df91e154eaef1add9df58cd60c0badeb050d5043bbd540b6f
|
|
| MD5 |
b5b87f6d992d998197a6ed2ae3833631
|
|
| BLAKE2b-256 |
def60022945e7a3f9fba2114c10b135325d400105eae07b82a247155b8223705
|
File details
Details for the file python_prtree-0.7.0-cp314-cp314-manylinux_2_26_aarch64.manylinux_2_28_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp314-cp314-manylinux_2_26_aarch64.manylinux_2_28_aarch64.whl
- Upload date:
- Size: 234.9 kB
- Tags: CPython 3.14, manylinux: glibc 2.26+ ARM64, manylinux: glibc 2.28+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
73bff330eec494e46f4a169194b8122c04f4b12319c2037e4333c1b43a4ba44c
|
|
| MD5 |
bf0a5378be17e6ae581e9588d4987d20
|
|
| BLAKE2b-256 |
9ad2137801e83d3b5113f6726ab660cb57a83798befdffd93548a1a57436f29f
|
File details
Details for the file python_prtree-0.7.0-cp314-cp314-macosx_11_0_arm64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp314-cp314-macosx_11_0_arm64.whl
- Upload date:
- Size: 201.4 kB
- Tags: CPython 3.14, macOS 11.0+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
9a27e348356509d96a7390c0eeb56a7515504c18c1cfcd53d2049b911151abe4
|
|
| MD5 |
1a7db8b7e38344e0d87a19f5759c7d9f
|
|
| BLAKE2b-256 |
019d1e25ea928e6ac309823d49c9fe3e99fd3fd24f718cbabb4a8c4d60ffc93c
|
File details
Details for the file python_prtree-0.7.0-cp314-cp314-macosx_10_15_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp314-cp314-macosx_10_15_x86_64.whl
- Upload date:
- Size: 232.7 kB
- Tags: CPython 3.14, macOS 10.15+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
7fb53aca10d856f4fe70cd0055a39f86a365a8e559988a48e0f99d18a3932de6
|
|
| MD5 |
e093ddbd62fcee6b76fd2217e8ffc3ff
|
|
| BLAKE2b-256 |
3357c62ed38b519256447d73220e5336caf339dcf47bc1f2361fb20868d64041
|
File details
Details for the file python_prtree-0.7.0-cp313-cp313-win_amd64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp313-cp313-win_amd64.whl
- Upload date:
- Size: 225.4 kB
- Tags: CPython 3.13, Windows x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
a8777e5b118f93c10d8c996e8c5e85c883ac5a2932407017cb236383a8d14d4e
|
|
| MD5 |
b49bf90bde41bd9695b2f153c22aca29
|
|
| BLAKE2b-256 |
7bf24789c0599453ced433b0cb5d4040c12190cd0b25608b9dd8d339b4598a62
|
File details
Details for the file python_prtree-0.7.0-cp313-cp313-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp313-cp313-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.3 MB
- Tags: CPython 3.13, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
a45aeca806c9e881ccd927b71a785abed70c8aae19d22bb59fa111513343b13f
|
|
| MD5 |
b279a1385801f23e77e1c1f41ef7a3a3
|
|
| BLAKE2b-256 |
32a9e91331a7dcca690b7c807184d1903951995c6f468d25e5b841f935780ea5
|
File details
Details for the file python_prtree-0.7.0-cp313-cp313-musllinux_1_2_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp313-cp313-musllinux_1_2_aarch64.whl
- Upload date:
- Size: 1.2 MB
- Tags: CPython 3.13, musllinux: musl 1.2+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
5b46db9fcb74ddd25a3f27cc656e74d9ed35f542ac6931ea34aae7350c2efc27
|
|
| MD5 |
7c45f7083377e4ad70fc906705a2006b
|
|
| BLAKE2b-256 |
67decbb66206f3dc03c3400fe973c89ed11c7aabf42fbe7454bff9cd8c45da93
|
File details
Details for the file python_prtree-0.7.0-cp313-cp313-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp313-cp313-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl
- Upload date:
- Size: 259.0 kB
- Tags: CPython 3.13, manylinux: glibc 2.27+ x86-64, manylinux: glibc 2.28+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
33a4e3e9b0ceb400cfddc7b0e7fb72c62e8bbbe5472ae4509dbd0a7adb576ae4
|
|
| MD5 |
4ce79556db1b8bca4ea3c109c8c8f04f
|
|
| BLAKE2b-256 |
395c642c133421cd9426171b73d17e00b7db21ada2e05cdfb0eb410695e08f29
|
File details
Details for the file python_prtree-0.7.0-cp313-cp313-manylinux_2_26_aarch64.manylinux_2_28_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp313-cp313-manylinux_2_26_aarch64.manylinux_2_28_aarch64.whl
- Upload date:
- Size: 234.5 kB
- Tags: CPython 3.13, manylinux: glibc 2.26+ ARM64, manylinux: glibc 2.28+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
1e0ced89c132f5e8df6354ce7d94a8937e0ab18948df0ff7045cdfb208c892a8
|
|
| MD5 |
7a2119729f555ecb0733b69af7d0cc1f
|
|
| BLAKE2b-256 |
7b812d7f8301ef23c3e4aabd8eaf0e6c9d9d687cba8d8ecc7570e9e6eed55481
|
File details
Details for the file python_prtree-0.7.0-cp313-cp313-macosx_11_0_arm64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp313-cp313-macosx_11_0_arm64.whl
- Upload date:
- Size: 201.1 kB
- Tags: CPython 3.13, macOS 11.0+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
61b91b198a822dd785f6ed0ecde8f127fe3be9d813f51bd29e1dcf4d5b2a21ed
|
|
| MD5 |
2cd26d20e0a50ad5c1c3b08a6571b184
|
|
| BLAKE2b-256 |
25e6f442d9947658e16dab9e4b210e47b463afae275370b56acb2790b8fd78e4
|
File details
Details for the file python_prtree-0.7.0-cp313-cp313-macosx_10_14_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp313-cp313-macosx_10_14_x86_64.whl
- Upload date:
- Size: 232.2 kB
- Tags: CPython 3.13, macOS 10.14+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
e5eb71e5a6bad4ee22156bd2e8c86f1d85e4c174243fc35cc2c73d15a3c801f1
|
|
| MD5 |
4159e57921634f31bf5565ad3999fdd1
|
|
| BLAKE2b-256 |
b36515f24fc51d2b5b6a954ddf812a1276bfaf65020669a44402e8499248af50
|
File details
Details for the file python_prtree-0.7.0-cp312-cp312-win_amd64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp312-cp312-win_amd64.whl
- Upload date:
- Size: 225.4 kB
- Tags: CPython 3.12, Windows x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
5754813e573908d0627a3d8017fcd922c256d4e7725423cc7331546af17e8306
|
|
| MD5 |
24411c40e0e3df2961f564fc8352afd9
|
|
| BLAKE2b-256 |
9339abcedde102d6828a5de3fffcb44294b6d4773aab9eab48db8f45f818f287
|
File details
Details for the file python_prtree-0.7.0-cp312-cp312-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp312-cp312-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.3 MB
- Tags: CPython 3.12, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
4edbade634ef5960ee43d2eb55f846f93d65decb400f98acd9cbb0fefc780bfe
|
|
| MD5 |
76122354f25e812bf1663b9a700b89bc
|
|
| BLAKE2b-256 |
bc29cb250a18d3c79368a70e690f7205f29a0d17944f12aa6efad70a7b9478d5
|
File details
Details for the file python_prtree-0.7.0-cp312-cp312-musllinux_1_2_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp312-cp312-musllinux_1_2_aarch64.whl
- Upload date:
- Size: 1.2 MB
- Tags: CPython 3.12, musllinux: musl 1.2+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
c705e3add7f9565bed8fc0ed208fcefd37a4389bcd383fa3b1f6654bd7ed5fa6
|
|
| MD5 |
c9a20b99d5fdd942fadc63bff889a9f1
|
|
| BLAKE2b-256 |
6287ce76e0408d28a90fe60b40f261801f0934eb3d71b60596934ca768499727
|
File details
Details for the file python_prtree-0.7.0-cp312-cp312-manylinux2014_x86_64.manylinux_2_17_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp312-cp312-manylinux2014_x86_64.manylinux_2_17_x86_64.whl
- Upload date:
- Size: 270.3 kB
- Tags: CPython 3.12, manylinux: glibc 2.17+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d187b938834bebba729e4a77926c6430eb7e118f249e44b78e83dc7bab2751cc
|
|
| MD5 |
40eb1430402620874e03cf29399356bc
|
|
| BLAKE2b-256 |
688ff5c16e7f185533cd667fa4a7ea54828ec2de0cc227f397ae9c63bfc8d419
|
File details
Details for the file python_prtree-0.7.0-cp312-cp312-manylinux2014_aarch64.manylinux_2_17_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp312-cp312-manylinux2014_aarch64.manylinux_2_17_aarch64.whl
- Upload date:
- Size: 249.6 kB
- Tags: CPython 3.12, manylinux: glibc 2.17+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
412c4277a6cc73a22888df7dc08ac71c24bcaef00922c626617dd2c9642a3617
|
|
| MD5 |
d57a2a4ff5fff56026ca6150c38eab92
|
|
| BLAKE2b-256 |
3ebfbc6b75760bf12937713c10c94cedc000278eef5eae1dada6116cc911bda0
|
File details
Details for the file python_prtree-0.7.0-cp312-cp312-macosx_11_0_arm64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp312-cp312-macosx_11_0_arm64.whl
- Upload date:
- Size: 201.0 kB
- Tags: CPython 3.12, macOS 11.0+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
672b4e677f32a51e7d32bb2a688bc555048cfec3772148ec19a5e6cb79909167
|
|
| MD5 |
66069e5941febe9dc6c8107b80a62571
|
|
| BLAKE2b-256 |
e689f43be6a8bace1f747e205b315cc3ec962046cd4c83c8c54732dc79b6b2b1
|
File details
Details for the file python_prtree-0.7.0-cp312-cp312-macosx_10_14_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp312-cp312-macosx_10_14_x86_64.whl
- Upload date:
- Size: 232.2 kB
- Tags: CPython 3.12, macOS 10.14+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
37771fa6d7de35a78aa18614c87d8116befbc409dc8d8d136ef35b4dd146004d
|
|
| MD5 |
23456134fbcfba59029648265fef19aa
|
|
| BLAKE2b-256 |
e93c4ae5b434e295f55a79d932d94eb710f5b6ecce50d7537077d7b42d279092
|
File details
Details for the file python_prtree-0.7.0-cp311-cp311-win_amd64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp311-cp311-win_amd64.whl
- Upload date:
- Size: 224.4 kB
- Tags: CPython 3.11, Windows x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
15e48dd6d6a467b1657ed0bfce52366f7577e5f5d6515547840e254eb9be4a10
|
|
| MD5 |
2a202ef56cda26604d07e8170c8fbb32
|
|
| BLAKE2b-256 |
5321f3ff130e6c4595e28a44d1a93f1469b70528368745a4a1adfe64e5ecf33d
|
File details
Details for the file python_prtree-0.7.0-cp311-cp311-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp311-cp311-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.3 MB
- Tags: CPython 3.11, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
e96496bd7de013f33dc2540f26c0e8178834b3e2d731178d010c82cd8e857497
|
|
| MD5 |
c4c271a4a90aa1f1075a443a2e5b6fc2
|
|
| BLAKE2b-256 |
bb2f7febb39416bb2acdb14dbb9d36378703d5828a3e33d1206ff0ea18692232
|
File details
Details for the file python_prtree-0.7.0-cp311-cp311-musllinux_1_2_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp311-cp311-musllinux_1_2_aarch64.whl
- Upload date:
- Size: 1.2 MB
- Tags: CPython 3.11, musllinux: musl 1.2+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
965c770af635337ca23040476146028b0bf87eae165cd70085b3bb72b7cad60c
|
|
| MD5 |
26ef6400d51e3e40c1c02dc4721b3b67
|
|
| BLAKE2b-256 |
1006374a3ebf24676fc4a18ca9f274bffdcc06bd141e60844f964190f56f9ff9
|
File details
Details for the file python_prtree-0.7.0-cp311-cp311-manylinux2014_x86_64.manylinux_2_17_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp311-cp311-manylinux2014_x86_64.manylinux_2_17_x86_64.whl
- Upload date:
- Size: 270.6 kB
- Tags: CPython 3.11, manylinux: glibc 2.17+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
0bae60c4a67b90e9583b0834b43db7c3678dfabad0d5a99d639dc4e5de72bb83
|
|
| MD5 |
5b3051c04c7c8edc3f7dbe77527a4749
|
|
| BLAKE2b-256 |
bce933bf3fe92caeb72da27d3e25c05c96614f43890b8c1dd5e193aec4c18474
|
File details
Details for the file python_prtree-0.7.0-cp311-cp311-manylinux2014_aarch64.manylinux_2_17_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp311-cp311-manylinux2014_aarch64.manylinux_2_17_aarch64.whl
- Upload date:
- Size: 249.8 kB
- Tags: CPython 3.11, manylinux: glibc 2.17+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
27eb0e0fb5c5850c534d58c54b704b14435fda16ddd0e01e6d38b349ec4a0efd
|
|
| MD5 |
2ff42994de1f5c84a786b3f215d4ddc0
|
|
| BLAKE2b-256 |
74e40c8dd5c8f9ac02f483e5d3486cccded4d6841ac0d0c2448d8eb6ec95cdf1
|
File details
Details for the file python_prtree-0.7.0-cp311-cp311-macosx_11_0_arm64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp311-cp311-macosx_11_0_arm64.whl
- Upload date:
- Size: 200.1 kB
- Tags: CPython 3.11, macOS 11.0+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
a8ad59b62bcde9e1178c0047e260ea98e7889bc22c8e13c0e1c9f49c124bab96
|
|
| MD5 |
a1d25a43dbe567c858e092a3956fc773
|
|
| BLAKE2b-256 |
1e35d0f85c56ec9c070b372c3026c4c4f1b07ad0efc9522187e98dfd744f3e6b
|
File details
Details for the file python_prtree-0.7.0-cp311-cp311-macosx_10_14_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp311-cp311-macosx_10_14_x86_64.whl
- Upload date:
- Size: 229.7 kB
- Tags: CPython 3.11, macOS 10.14+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
45307ed0d30d53f93386364f6a00dee57a4077e0b905883abeef81d504462c91
|
|
| MD5 |
687e5f7b840e40c32bed12529b30b15e
|
|
| BLAKE2b-256 |
13a5139793882096ecca0bde59438b74fa6d435582df9a35af86323ab123afa7
|
File details
Details for the file python_prtree-0.7.0-cp310-cp310-win_amd64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp310-cp310-win_amd64.whl
- Upload date:
- Size: 223.4 kB
- Tags: CPython 3.10, Windows x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
fc275d32150318373b781069856a03f4aef68e5c4652cc7933a797f4e6b63c96
|
|
| MD5 |
473f190bba0a1848c629a9059f698571
|
|
| BLAKE2b-256 |
34e24b1fad43a298b5a19f998d1384df44763bcafc845b45da5a924bd59d5beb
|
File details
Details for the file python_prtree-0.7.0-cp310-cp310-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp310-cp310-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.3 MB
- Tags: CPython 3.10, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
56d851e213321d1357205ad4eb6c4add4eea9a945ed5306f8ed03d5d331404bd
|
|
| MD5 |
f9602746a8b5b6db365e540eb5be18f1
|
|
| BLAKE2b-256 |
a2ba2d5a9889c0649bf2ffd202db01f9c53f6cb4081a992d5910c8aa5db1e440
|
File details
Details for the file python_prtree-0.7.0-cp310-cp310-musllinux_1_2_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp310-cp310-musllinux_1_2_aarch64.whl
- Upload date:
- Size: 1.2 MB
- Tags: CPython 3.10, musllinux: musl 1.2+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
1b897a3e8eedffa12c428d0343d7f8b01186c480f8afec101ee47ad052095aea
|
|
| MD5 |
d068e19e936aa457da551d3c6800c9c2
|
|
| BLAKE2b-256 |
053d1133f85bd1df50e7109530a9ba71fee54f35f6afd6224c79dbfce1fe8f2a
|
File details
Details for the file python_prtree-0.7.0-cp310-cp310-manylinux2014_x86_64.manylinux_2_17_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp310-cp310-manylinux2014_x86_64.manylinux_2_17_x86_64.whl
- Upload date:
- Size: 269.8 kB
- Tags: CPython 3.10, manylinux: glibc 2.17+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
9705c55513603abc658607aeb3e1f1ea793410e9f51338dc1c197bfb7da8f4b0
|
|
| MD5 |
ebdc7374be246615c279d40f5d72601b
|
|
| BLAKE2b-256 |
69f09ce6101831262305a64b91ff1b5ee57856cd5269d24e2a5dcf450abb2e5d
|
File details
Details for the file python_prtree-0.7.0-cp310-cp310-manylinux2014_aarch64.manylinux_2_17_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp310-cp310-manylinux2014_aarch64.manylinux_2_17_aarch64.whl
- Upload date:
- Size: 249.0 kB
- Tags: CPython 3.10, manylinux: glibc 2.17+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d53fbd7d2df8c1d94a7be4615b7facc28ed52d122c3ca5df4fa097527b90339e
|
|
| MD5 |
d75e83cb1885826e1ce169c9b0db84bc
|
|
| BLAKE2b-256 |
4ffe90fc62b57cad716099dd0a626aea3509aa0847d47fe9f1a2d94d53209faf
|
File details
Details for the file python_prtree-0.7.0-cp310-cp310-macosx_11_0_arm64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp310-cp310-macosx_11_0_arm64.whl
- Upload date:
- Size: 198.7 kB
- Tags: CPython 3.10, macOS 11.0+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
106e81160c55b4df11b6d48efed7a2a724d23c76e274f2b351285e5c17b8c082
|
|
| MD5 |
682a4a877d6e153e882f839fba0ffb24
|
|
| BLAKE2b-256 |
f6276c2705d140b114668e60825e37db768d72efbf1226889fcd3b374ac54e4e
|
File details
Details for the file python_prtree-0.7.0-cp310-cp310-macosx_10_14_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp310-cp310-macosx_10_14_x86_64.whl
- Upload date:
- Size: 228.3 kB
- Tags: CPython 3.10, macOS 10.14+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
bcbe0664de46123a2a6723a1530a910e5c633715fc1b3104cbc3f55b8e1af4a6
|
|
| MD5 |
c7a761fd3e53b343ec81214abeb032f6
|
|
| BLAKE2b-256 |
c9e6ae28c7e2cb5ed136f5988f2d023ef9a76a1a7f3f5e74c3573bfec4deb55c
|
File details
Details for the file python_prtree-0.7.0-cp39-cp39-win_amd64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp39-cp39-win_amd64.whl
- Upload date:
- Size: 227.9 kB
- Tags: CPython 3.9, Windows x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
a0aa926b5203c914fde805dd34640005223e6d2dd255369e42fa22654fd5cec9
|
|
| MD5 |
e75ca1f9a964881d5272ddcf726e0ea2
|
|
| BLAKE2b-256 |
f6c16476e01854e788798b46a1c8f0260b5a972364e0c4359d023d240a6a3794
|
File details
Details for the file python_prtree-0.7.0-cp39-cp39-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp39-cp39-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.3 MB
- Tags: CPython 3.9, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
beda646e2dab47e05297276a35342f0a29be3d3d96f009d3d257857bc9fdb7f5
|
|
| MD5 |
cc7d8d517c12ea19422c607ae64ea7c7
|
|
| BLAKE2b-256 |
fa016d812fc90774601a8234c68eb352e0ed8bdae957787e075d5cb15c34f13c
|
File details
Details for the file python_prtree-0.7.0-cp39-cp39-musllinux_1_2_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp39-cp39-musllinux_1_2_aarch64.whl
- Upload date:
- Size: 1.2 MB
- Tags: CPython 3.9, musllinux: musl 1.2+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
c13f4ddf2339371ddf6d7569e316f06e0ce1b12e7923167a40de8ea12f352390
|
|
| MD5 |
4063cd13603caafd1f8f55457ece5bfc
|
|
| BLAKE2b-256 |
30f52cb689617da268e26164be285c4cb62732546d6c5301ee6b7dfaed728acd
|
File details
Details for the file python_prtree-0.7.0-cp39-cp39-manylinux2014_x86_64.manylinux_2_17_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp39-cp39-manylinux2014_x86_64.manylinux_2_17_x86_64.whl
- Upload date:
- Size: 270.0 kB
- Tags: CPython 3.9, manylinux: glibc 2.17+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
214ae95c7c9bbea8c5e62d8b751313d29db7b059589ab8e72a14c9248af97bdc
|
|
| MD5 |
e2c20304b6c758359aaf22df5c254ca1
|
|
| BLAKE2b-256 |
29afae5555655b36a8440ed7ed95a2ecb1375c64cfbbb66fdf63a2734dbfb377
|
File details
Details for the file python_prtree-0.7.0-cp39-cp39-manylinux2014_aarch64.manylinux_2_17_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp39-cp39-manylinux2014_aarch64.manylinux_2_17_aarch64.whl
- Upload date:
- Size: 249.0 kB
- Tags: CPython 3.9, manylinux: glibc 2.17+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
dfd5d300d4f50e7e6bffdd2b875c8c00605e161d1a2181d06737267dcb191db0
|
|
| MD5 |
d7f16deaf16dc1ac81cc83f4921488fb
|
|
| BLAKE2b-256 |
e014c06a87bc4c55fc17f4ff82ac1ca1d809ef4ae79a1d98c67e5db1bef2d899
|
File details
Details for the file python_prtree-0.7.0-cp39-cp39-macosx_11_0_arm64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp39-cp39-macosx_11_0_arm64.whl
- Upload date:
- Size: 198.8 kB
- Tags: CPython 3.9, macOS 11.0+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d6e47ee85ad15c9844692e6eed0403c782a20db08b99a8253b445c480a6af48d
|
|
| MD5 |
3030c8e7793be019f57c9d1f5597af0f
|
|
| BLAKE2b-256 |
aa0c3742a51f237008dd0eaf6796731041f01e484bae9b18ea19168733b1f687
|
File details
Details for the file python_prtree-0.7.0-cp39-cp39-macosx_10_14_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp39-cp39-macosx_10_14_x86_64.whl
- Upload date:
- Size: 228.4 kB
- Tags: CPython 3.9, macOS 10.14+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
69af2f6beafb5a7976b8503cc97b6b3df913b84f234f5daed072e7b4f9f88e02
|
|
| MD5 |
d588b0cd2c8184e938236cd783ef523c
|
|
| BLAKE2b-256 |
9bca039fa9ac2b2a82e01ce8928041286b417740f7ca1328d094fc641822c593
|
File details
Details for the file python_prtree-0.7.0-cp38-cp38-win_amd64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp38-cp38-win_amd64.whl
- Upload date:
- Size: 223.1 kB
- Tags: CPython 3.8, Windows x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
90388be34ed645ae1eb9084e2d70033af57f939c0fae9c15f911a7bbd92f5dce
|
|
| MD5 |
49396b8c5fed5acc3b0869ed7fcd9d90
|
|
| BLAKE2b-256 |
3640a09fe1d5fbdf4a7b3f1f17948abf066a49e80be882ee933ec6b862aae8b8
|
File details
Details for the file python_prtree-0.7.0-cp38-cp38-musllinux_1_2_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp38-cp38-musllinux_1_2_x86_64.whl
- Upload date:
- Size: 1.3 MB
- Tags: CPython 3.8, musllinux: musl 1.2+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
e9e4ef67fd0cd27fe1d41637e077fbed81c66bc99e86f0370304a77034a86fcc
|
|
| MD5 |
0e068f0d796bbf49ce44d34307f627e8
|
|
| BLAKE2b-256 |
354baa8f9330a405076b8c8c5930f916fd24ea4d3434f3d301a949079fa6ac2b
|
File details
Details for the file python_prtree-0.7.0-cp38-cp38-musllinux_1_2_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp38-cp38-musllinux_1_2_aarch64.whl
- Upload date:
- Size: 1.2 MB
- Tags: CPython 3.8, musllinux: musl 1.2+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
288c6533bc02e4a4a52ba6a23b4ae696a583a8e24cb21edeb5ff8568ee30a41e
|
|
| MD5 |
f0bfab5129c73f8067d1822f4d4db38e
|
|
| BLAKE2b-256 |
10709e551e9a2a7224c2f0b775fa98fcbb79a12cc0a6e8285beaf97ae5536d34
|
File details
Details for the file python_prtree-0.7.0-cp38-cp38-manylinux2014_x86_64.manylinux_2_17_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp38-cp38-manylinux2014_x86_64.manylinux_2_17_x86_64.whl
- Upload date:
- Size: 269.3 kB
- Tags: CPython 3.8, manylinux: glibc 2.17+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
ce294ca333fe6cd81d65672a0408afb639455457a2f27b27154de607b3b9b0e6
|
|
| MD5 |
07f258bc9d53162b4db1703c28dfb9e6
|
|
| BLAKE2b-256 |
c120b9876174540e11e057d5efbd32a8206c69fc9f0fe575876a7b043095dcea
|
File details
Details for the file python_prtree-0.7.0-cp38-cp38-manylinux2014_aarch64.manylinux_2_17_aarch64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp38-cp38-manylinux2014_aarch64.manylinux_2_17_aarch64.whl
- Upload date:
- Size: 248.5 kB
- Tags: CPython 3.8, manylinux: glibc 2.17+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
8197bb27b9d16a7cbbd82582a76177b2fc25571cc2c2cd89c22a06c715435d21
|
|
| MD5 |
ed0a98f998b63cb04cf50cf013be6a19
|
|
| BLAKE2b-256 |
90d508e34f1535ada4cf7ef67f3ff3fcfd3cec376ce90411fa2850128ac11534
|
File details
Details for the file python_prtree-0.7.0-cp38-cp38-macosx_11_0_arm64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp38-cp38-macosx_11_0_arm64.whl
- Upload date:
- Size: 198.4 kB
- Tags: CPython 3.8, macOS 11.0+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
6f9d6bdac40bac00ea7cbc6fab63a36ab5fdd92c1be85030db50549a65830ca8
|
|
| MD5 |
d81cb190c4c1db4fd9dfd5035bb815e2
|
|
| BLAKE2b-256 |
15d0209e781d68d6ae2704b6127b3f2814012f44d51b6460916ed41458792908
|
File details
Details for the file python_prtree-0.7.0-cp38-cp38-macosx_10_14_x86_64.whl.
File metadata
- Download URL: python_prtree-0.7.0-cp38-cp38-macosx_10_14_x86_64.whl
- Upload date:
- Size: 227.9 kB
- Tags: CPython 3.8, macOS 10.14+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.9.25
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
11505fdeccc2f9d23eb98c176311007b4e0844f37d72fbf856f84b6771a92113
|
|
| MD5 |
8ae56382dba807c6c66f5cdc95536422
|
|
| BLAKE2b-256 |
c0a114ec97fee4aa8b5397a6f2ff52ade1b0ce2c7396d464a76d76a13a78526a
|







