A Unified Framework for Robot Learning


Project description








RoboHive is a collection of environments/tasks simulated with the MuJoCo physics engine exposed using the OpenAI-Gym API. Its compatible with any gym-compatible agents training framework (Stable Baselines, RLlib, TorchRL, AgentHive, etc)
Getting Started
Getting started with RoboHive is as simple as -
# Install RoboHive
pip install robohive
# Initialize RoboHive
robohive_init
# Demo an environment
python -m robohive.utils.examine_env -e FrankaReachRandom-v0
or, alternatively for editable installation -
# Clone RoboHive
git clone --recursive https://github.com/vikashplus/robohive.git; cd robohive
# Install (editable) RoboHive
pip install -e .
# Demo an environment
python -m robohive.utils.examine_env -e FrankaReachRandom-v0
See detailed installation instructions for options on mujoco-python-bindings and visual-encoders (R3M, RRL, VC), and frequently asked questions for more details.
Suites
RoboHive contains a variety of environments, which are organized as suites. Each suite is a collection of loosely related environments. The following suites are provided at the moment with plans to improve the diversity of the collection.
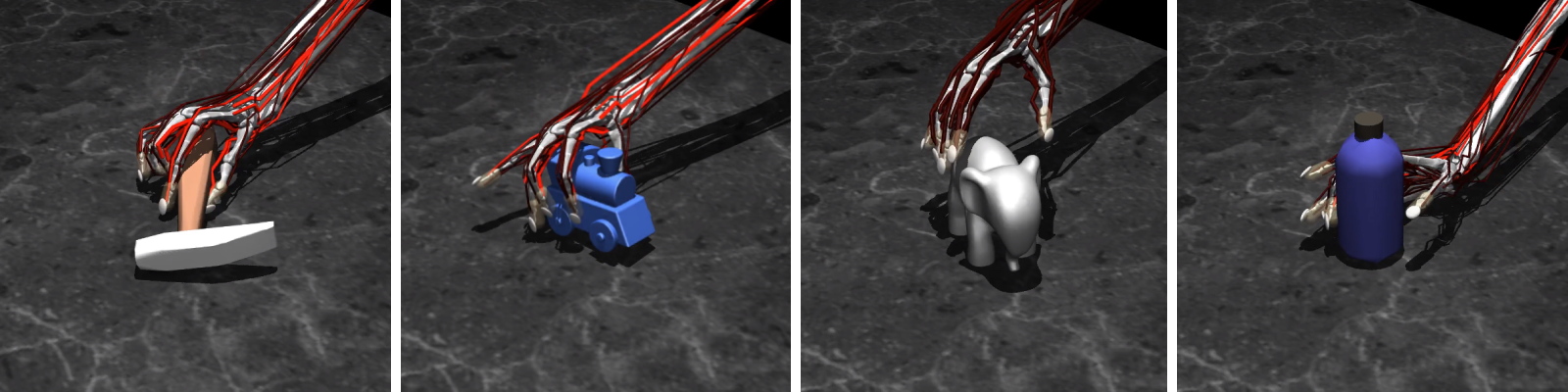
| Hand-Manipulation-Suite (video) |
|---|
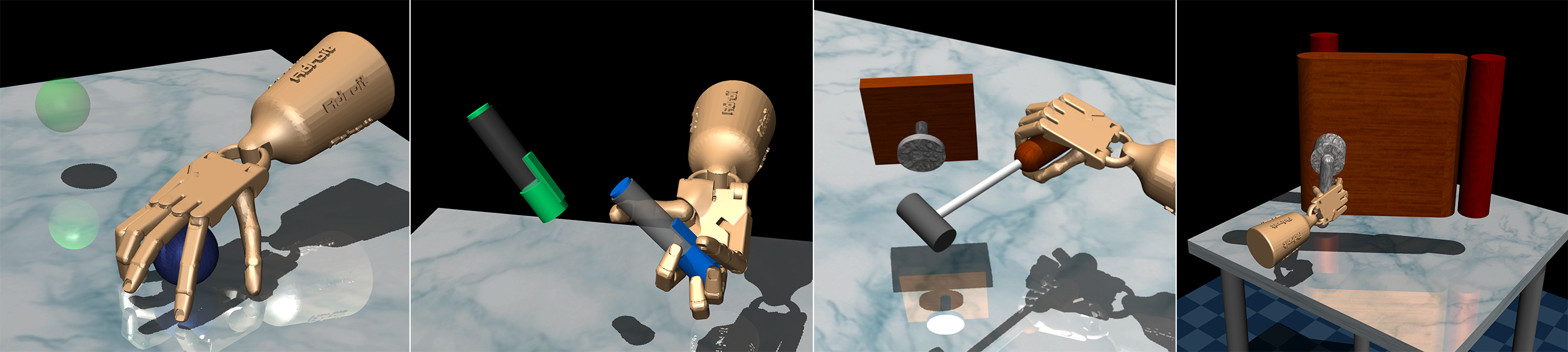 A collection of environments centered around dexterous manipulation. Standard ADROIT benchmarks introduced in Learning Complex Dexterous Manipulation with Deep Reinforcement Learning and Demonstrations, RSS2018.) are a part of this suite A collection of environments centered around dexterous manipulation. Standard ADROIT benchmarks introduced in Learning Complex Dexterous Manipulation with Deep Reinforcement Learning and Demonstrations, RSS2018.) are a part of this suite |
| Arm-Manipulation-Suite |
|---|
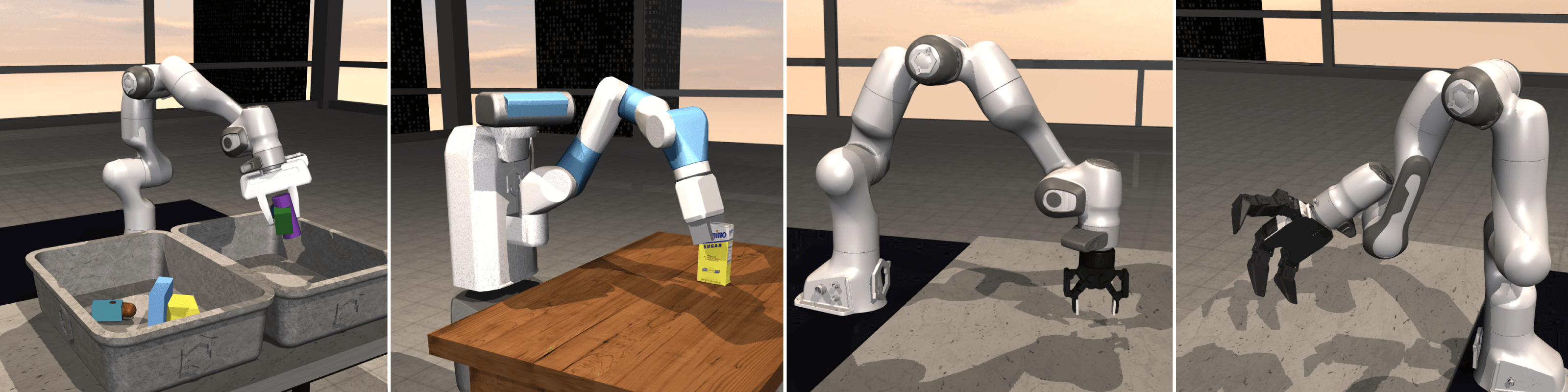 A collection of environments centered around Arm manipulation. A collection of environments centered around Arm manipulation. |
| Myo-Suite (website) |
|---|
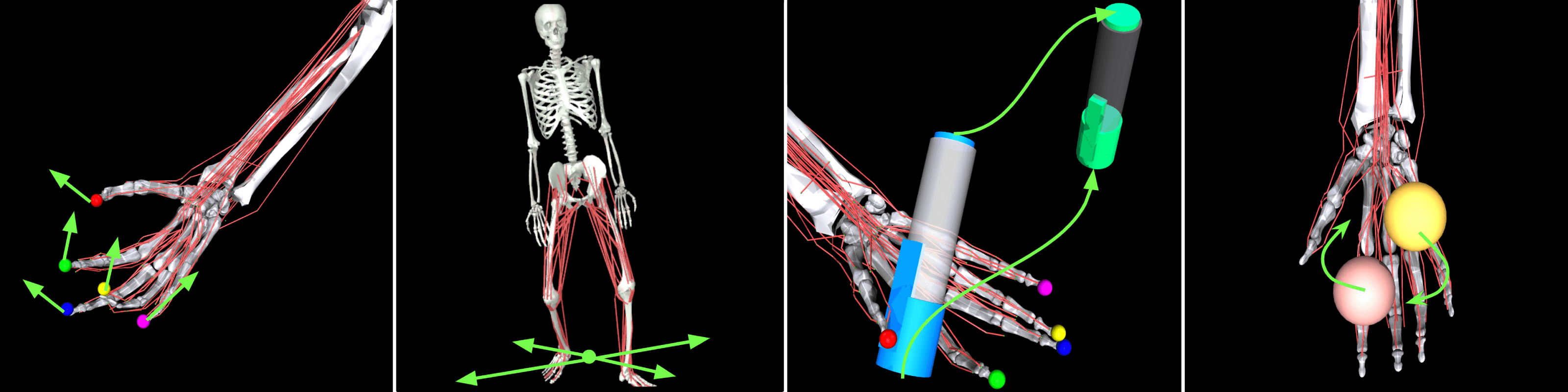 A collection of environments centered around Musculoskeletal control. A collection of environments centered around Musculoskeletal control. |
| Myo/MyoDM-Suite (Website) |
|---|
 A collection of musculoskeletal environments for dexterous manipulation introduced as MyoDM in MyoDeX. A collection of musculoskeletal environments for dexterous manipulation introduced as MyoDM in MyoDeX. |
| MultiTask Suite |
|---|
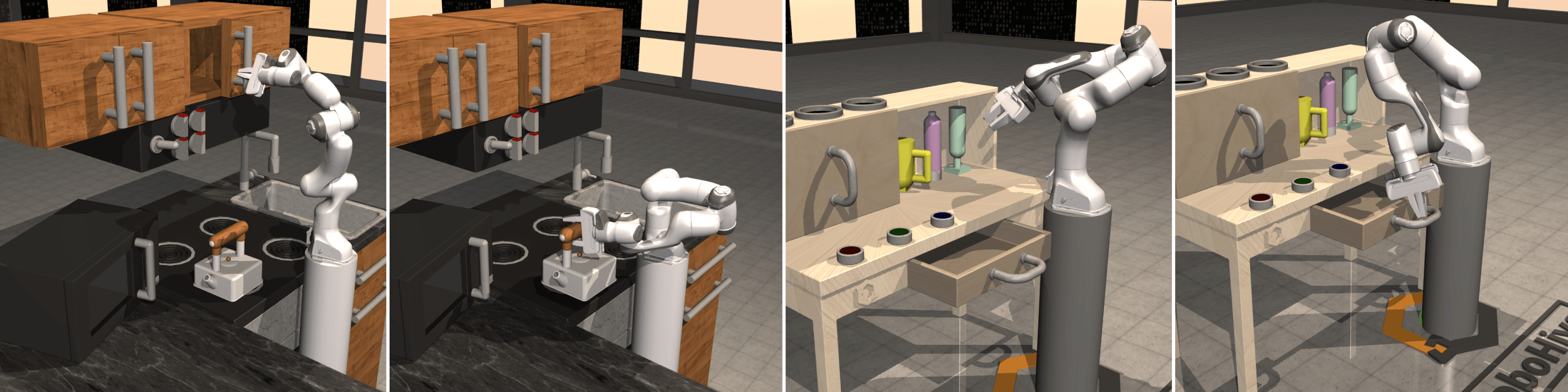 A collection of environments centered around multi-task. Standard RelayKitchen benchmarks are a part of this suite. A collection of environments centered around multi-task. Standard RelayKitchen benchmarks are a part of this suite. |
- TCDM Suite (WIP)
This suite contains a collection of environments centered around dexterous manipulation. Standard TCDM benchmarks are a part of this suite
- ROBEL Suite (Coming soon)
This suite contains a collection of environments centered around real-world locomotion and manipulation. Standard ROBEL benchmarks are a part of this suite
Citation
If you find RoboHive useful in your research,
- please consider supporting the project by providing a star ⭐
- please consider citing our project by using the following BibTeX entry:
@Misc{RoboHive2020,
title = {RoboHive -- A Unified Framework for Robot Learning},
howpublished = {\url{https://sites.google.com/view/robohive}},
year = {2020},
url = {https://sites.google.com/view/robohive},
}


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distributions
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file robohive-0.7.0-py2.py3-none-any.whl.
File metadata
- Download URL: robohive-0.7.0-py2.py3-none-any.whl
- Upload date:
- Size: 13.5 MB
- Tags: Python 2, Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.0.0 CPython/3.9.18
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
7bf4edb1fa923288cb207a786331e267b19cf2f84470061a46a0c7ac890f6a23
|
|
| MD5 |
8406c0121421d5b2f111ae97b3eb363a
|
|
| BLAKE2b-256 |
d300fc79392323e981f61a4563f01dcccf0ada435f269d431bd19162cc7fa5c5
|







