A highly scalable and customizable safe reinforcement learning environment.




Project description
Safety-Gymnasium






Why Safety-Gymnasium? | Documentation | Install guide | Customization
Safety-Gymnasium is a highly scalable and customizable Safe Reinforcement Learning (SafeRL) library. It aims to deliver a good view of benchmarking SafeRL algorithms and a standardized set of environments. We provide a set of standard APIs which are compatible with information on constraints. Users can explore new insights via an elegant code framework and well-designed environments.
Why Safety-Gymnasium?
Here we provide a table for comparison of Safety-Gymnasium and existing SafeRL Environments libraries.
| SafeRL Envs |
Engine | Vectorized Environments |
New Gym API(3) | Vision Input |
|---|---|---|---|---|
Safety-Gym |
mujoco-py(1) |
❌ | ❌ | minimally supported |
safe-control-gym |
PyBullet | ❌ | ❌ | ❌ |
| Velocity-Constraints(2) | N/A | ❌ | ❌ | ❌ |
mujoco-circle |
PyTorch | ❌ | ❌ | ❌ |
Safety-Gymnasium |
MuJoCo 2.3.0+ | ✅ | ✅ | ✅ |
(1): Maintenance (expect bug fixes and minor updates); the last commit is 19 Nov 2021. Safety-Gym depends on mujoco-py 2.0.2.7, which was updated on Oct 12, 2019.
(2): There is no official library for speed-related environments, and its associated cost constraints are constructed from info. But the task is widely used in the study of SafeRL, and we encapsulate it in Safety-Gymnasium.
(3): In the gym 0.26.0 release update, a new API of interaction was redefined.
Environments
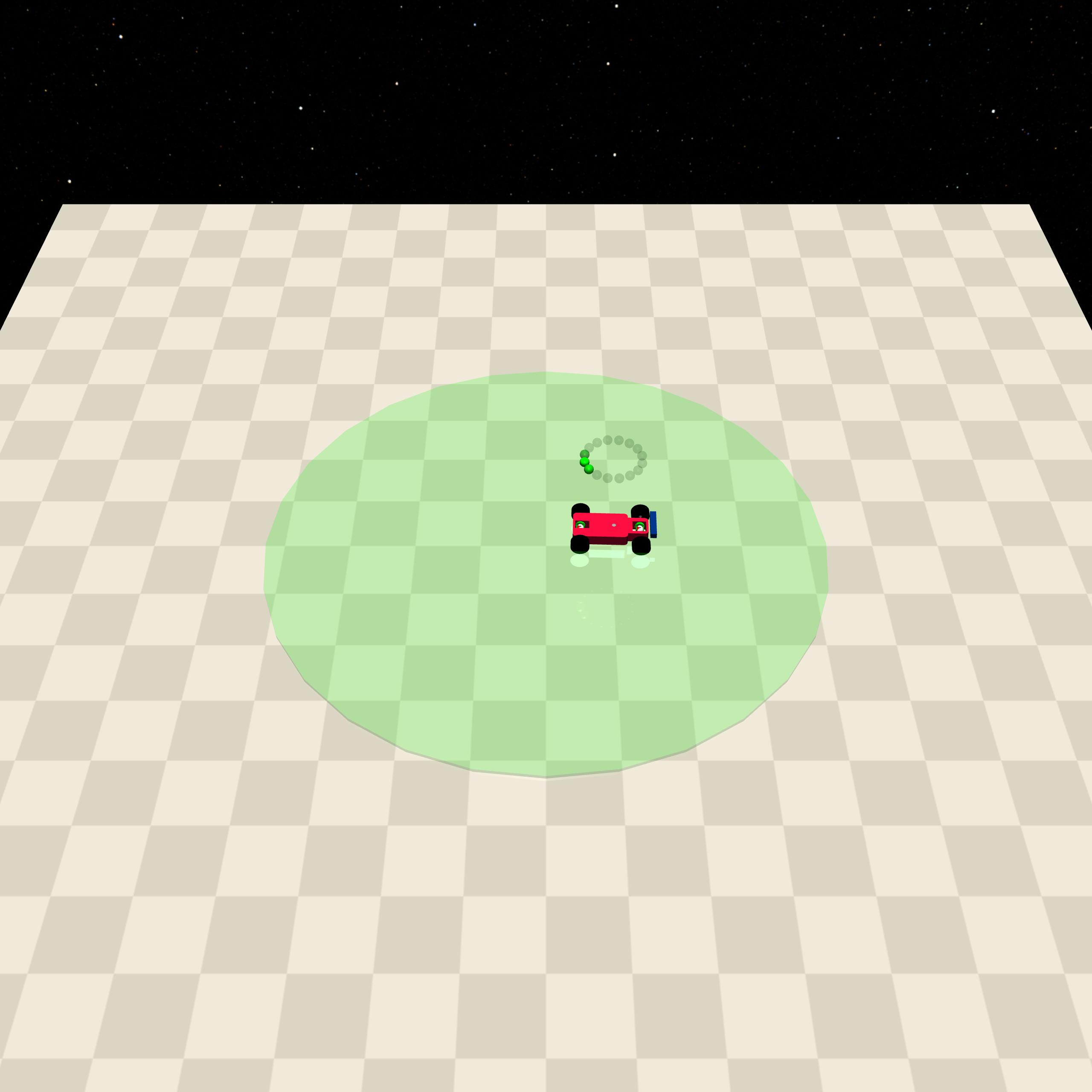
We designed a variety of safety-enhanced learning tasks and integrated the contributions from the RL community: safety-velocity, safety-run, safety-circle, safety-goal, safety-button, etc.
We introduce a unified safety-enhanced learning benchmark environment library called Safety-Gymnasium.
Further, to facilitate the progress of community research, we redesigned Safety-Gym and removed the dependency on mujoco-py.
We built it on top of MuJoCo and fixed some bugs, more specific bug reports can refer to Safety-Gym's BUG Report.
Here is a list of all the environments we support for now:
| Category | Task | Agent | Example |
|---|---|---|---|
| Safe Navigation | Goal[012] | Point, Car, Doggo, Racecar, Ant | SafetyPointGoal1-v0 |
| Button[012] | |||
| Push[012] | |||
| Circle[012] | |||
| Velocity | Velocity | HalfCheetah, Hopper, Swimmer, Walker2d, Ant, Humanoid | SafetyAntVelocity-v1 |
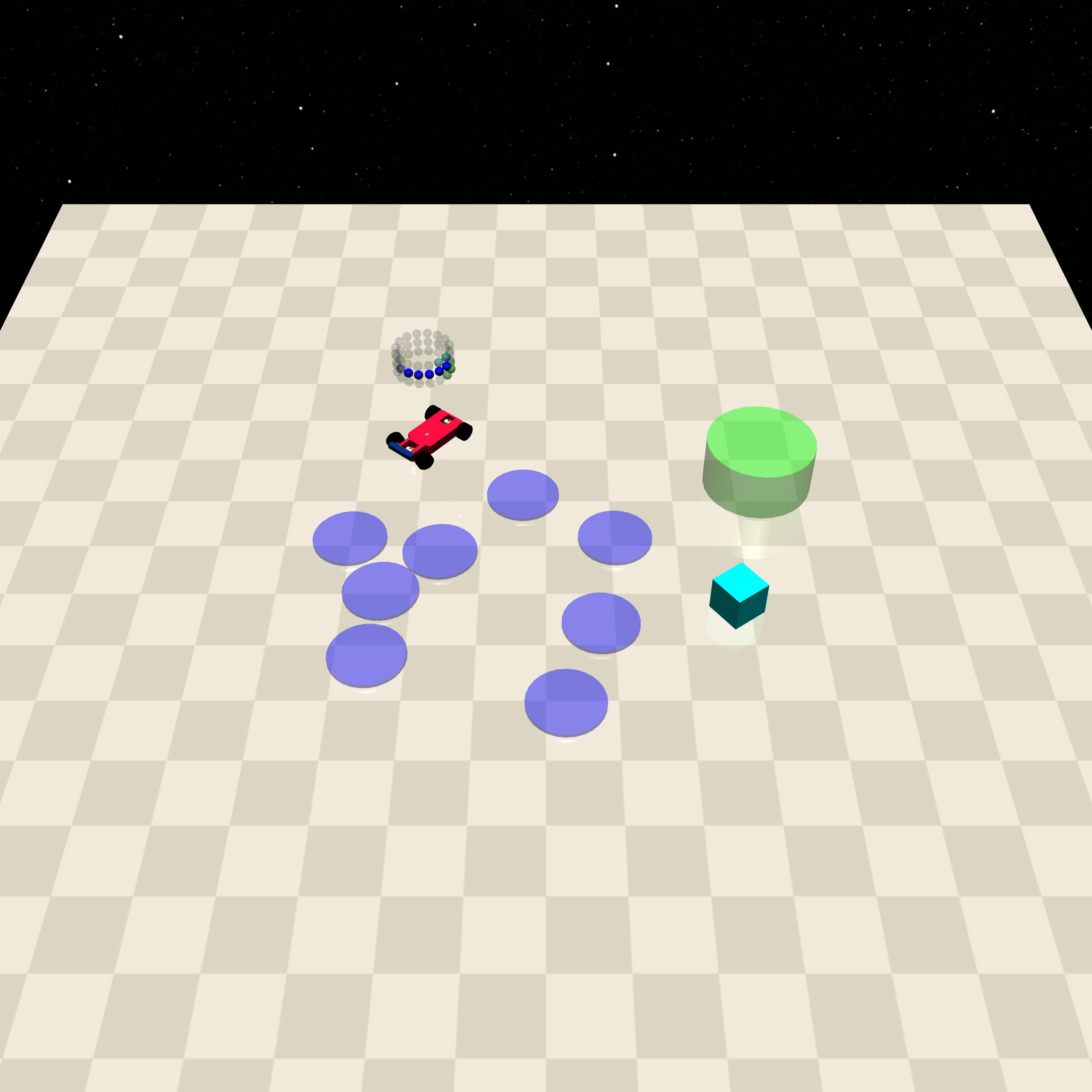
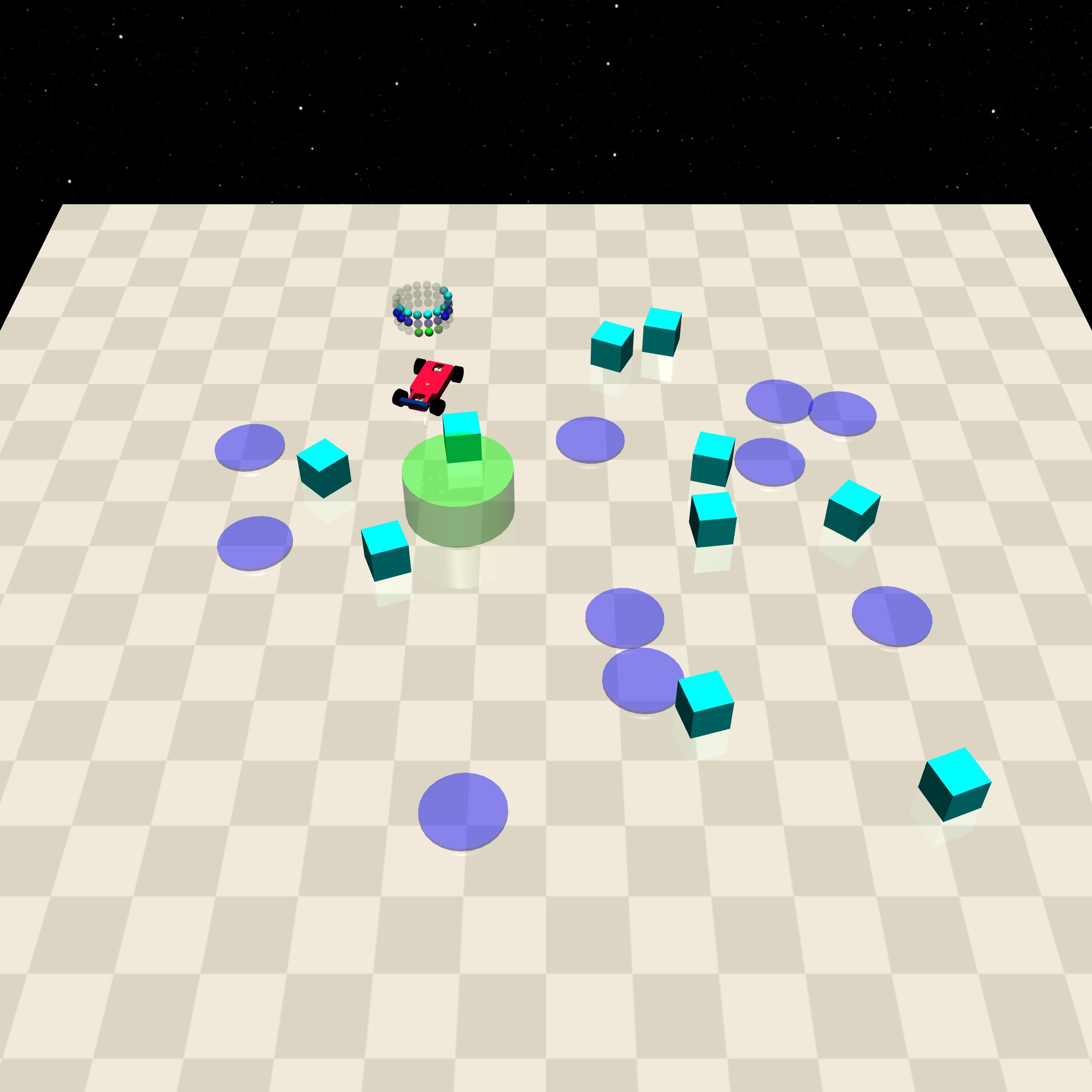
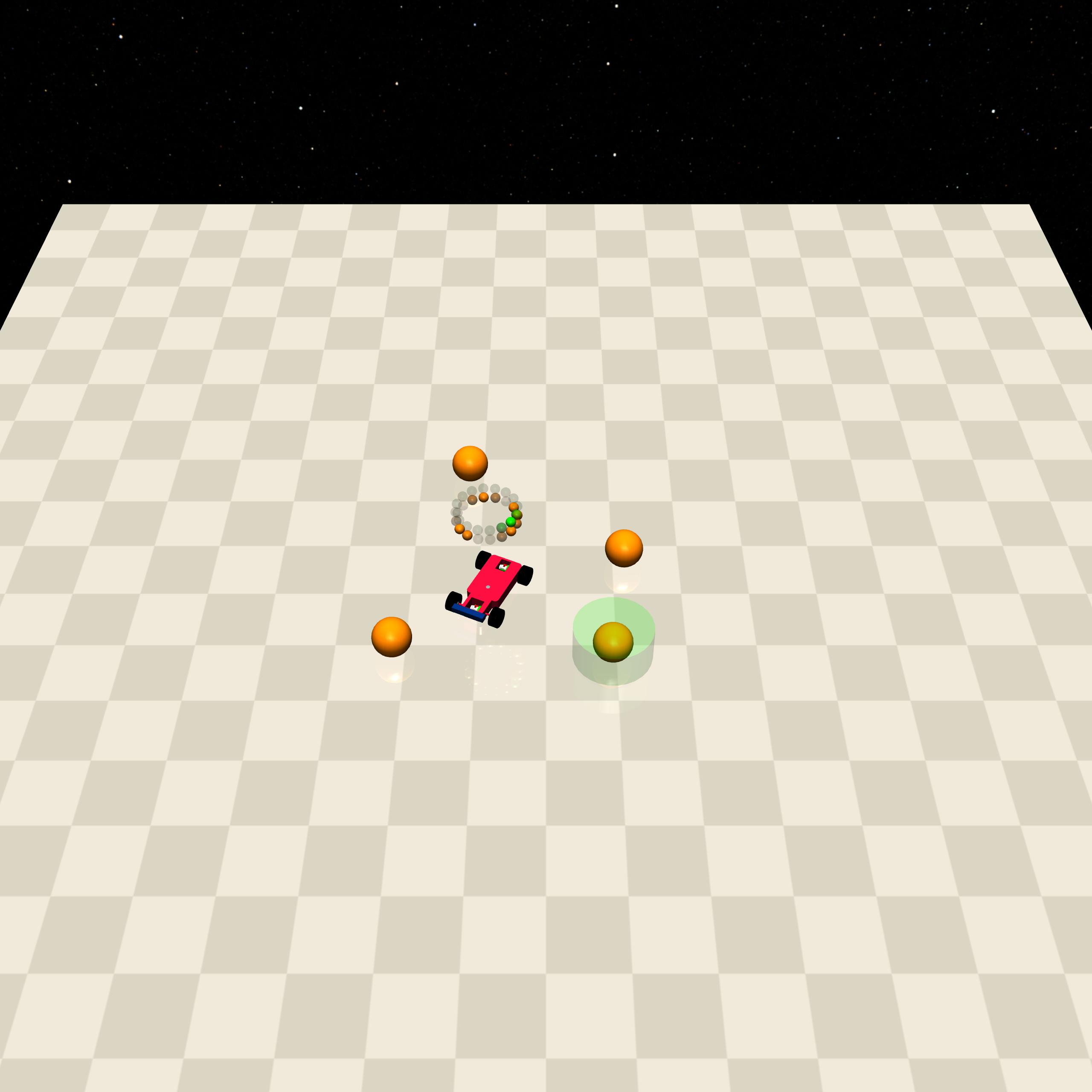
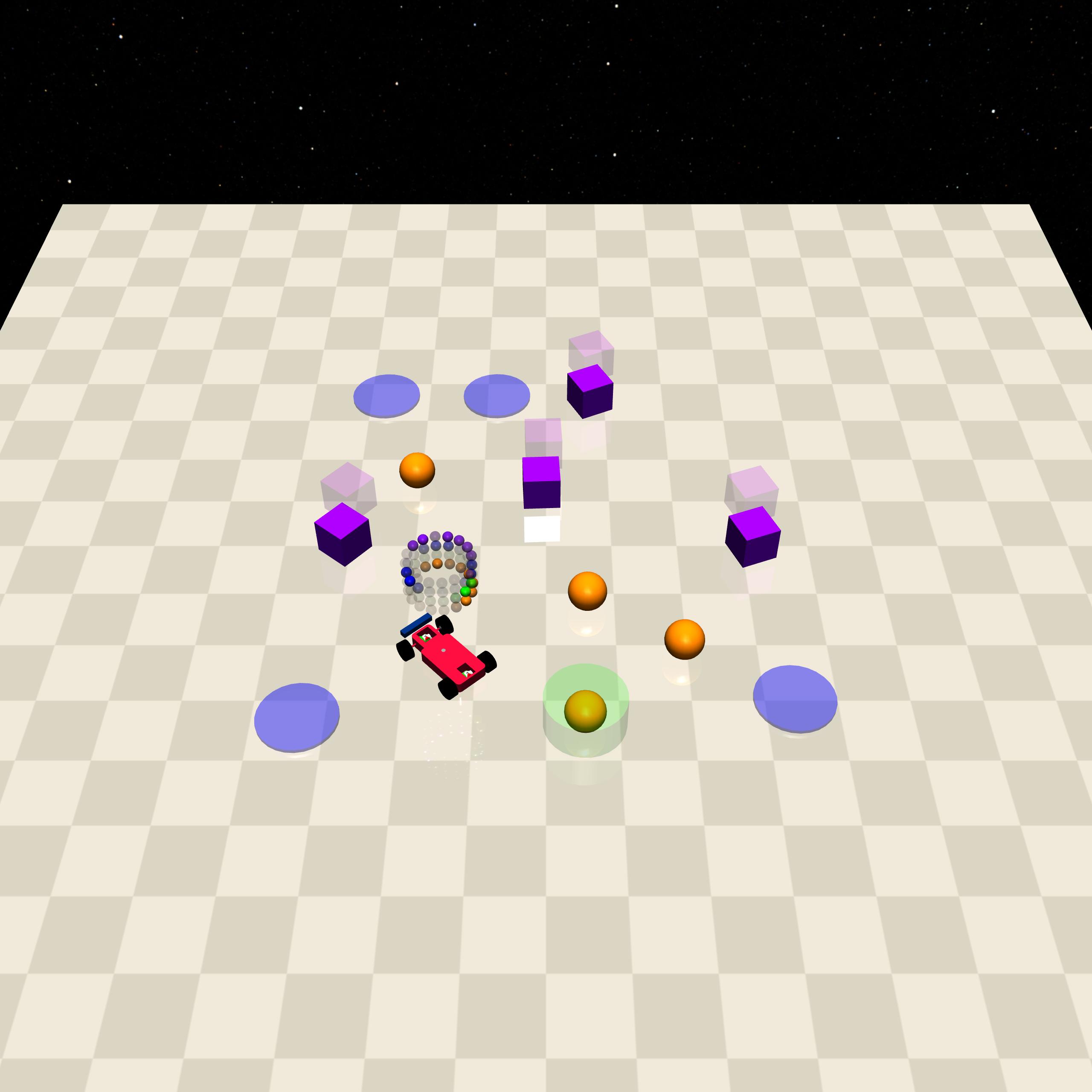
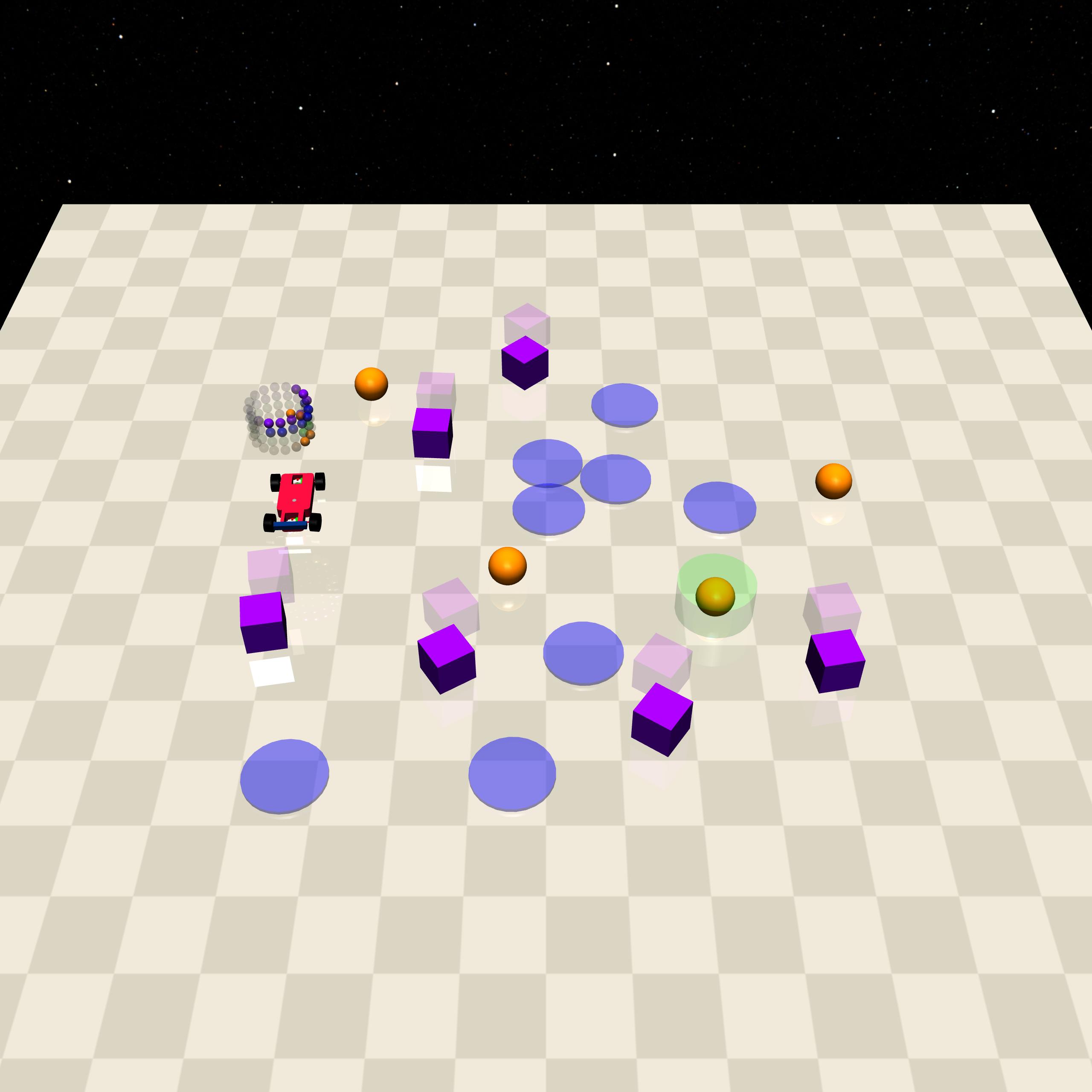
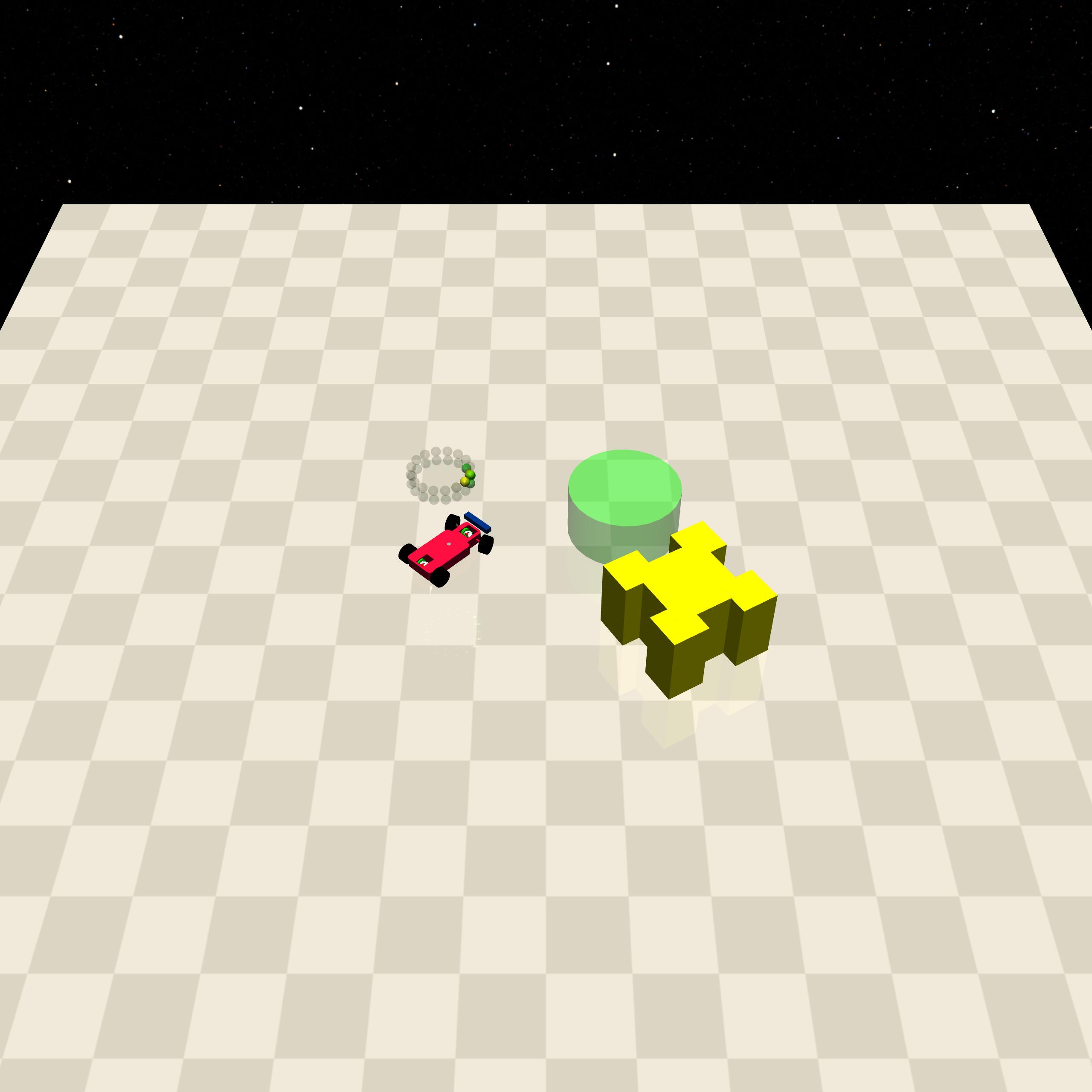
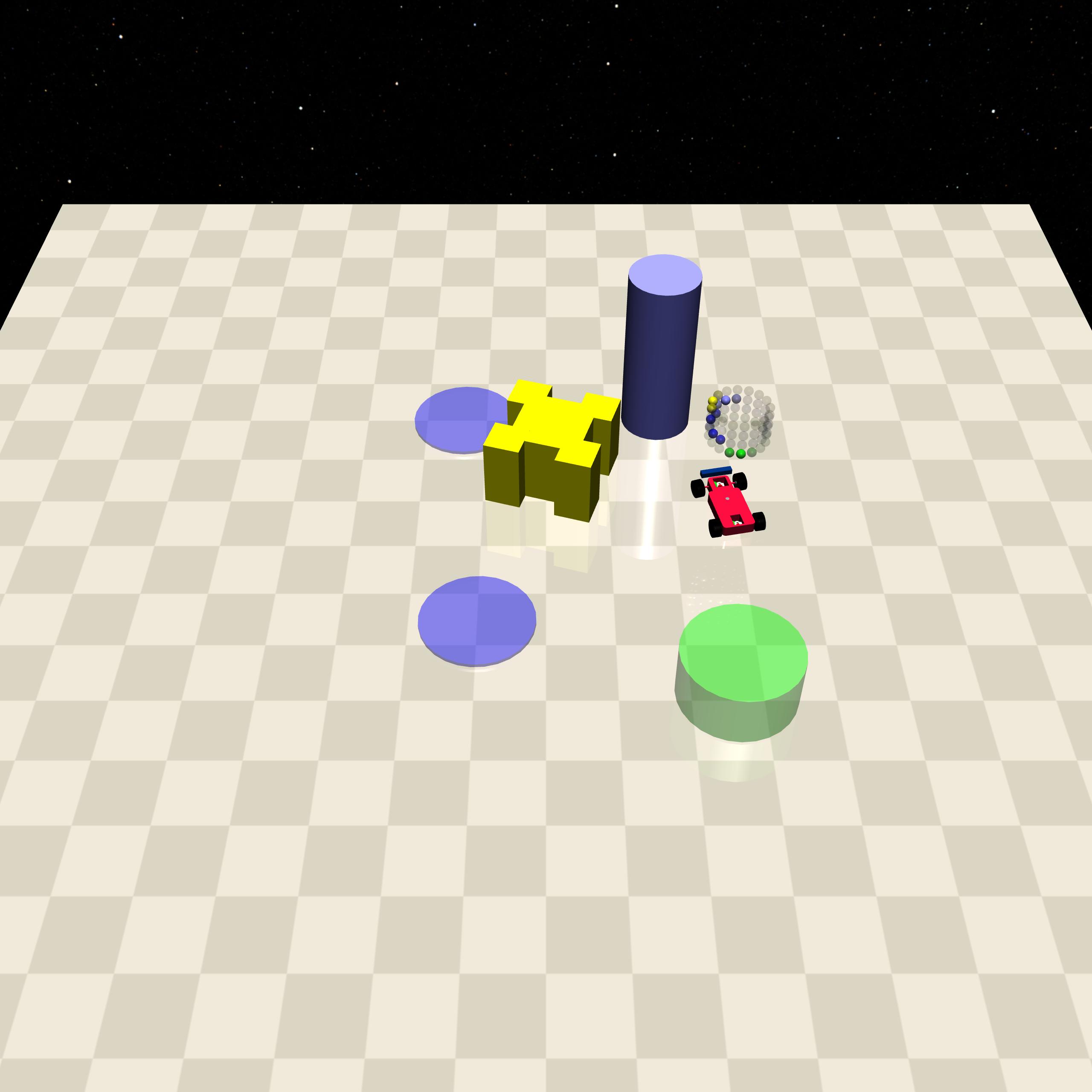
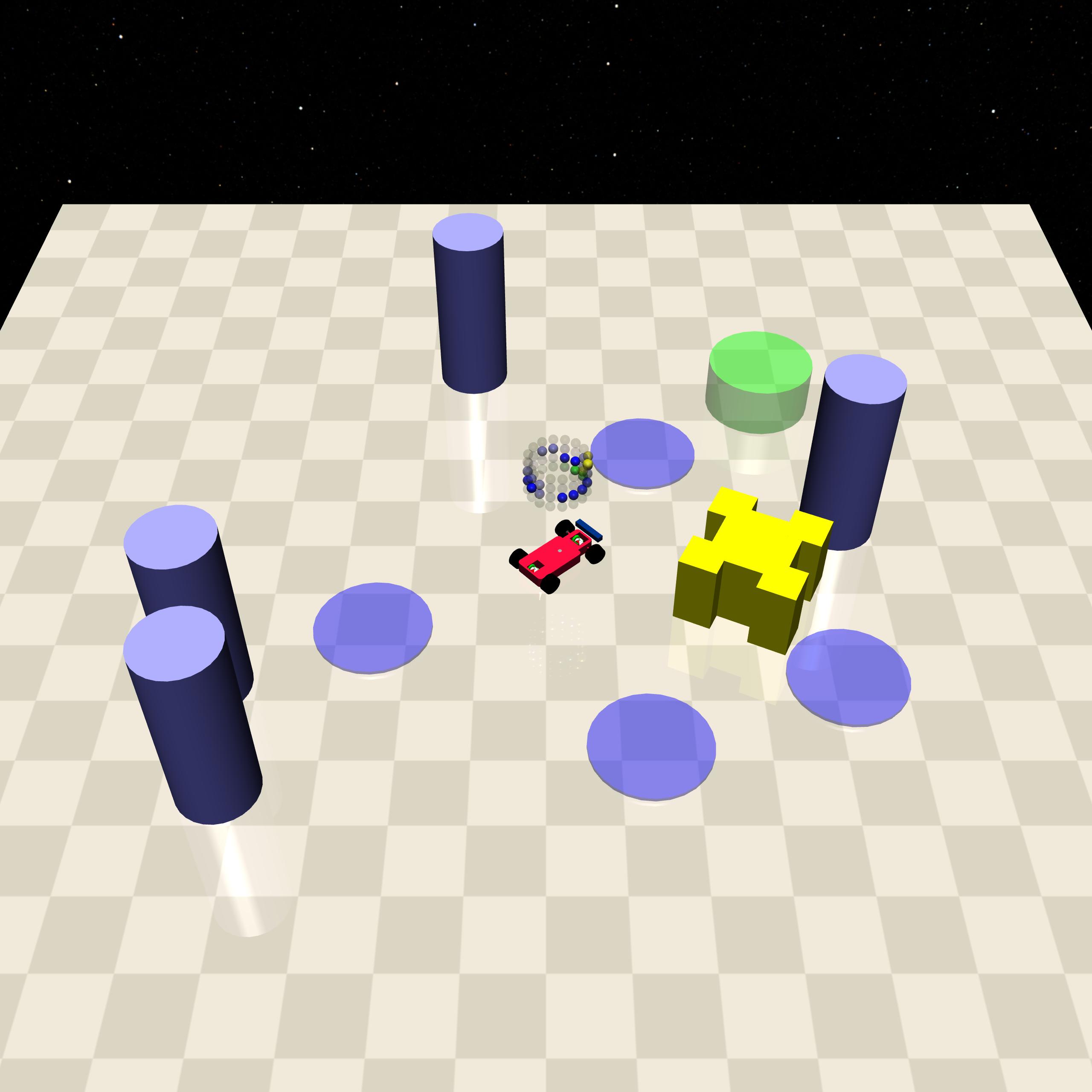
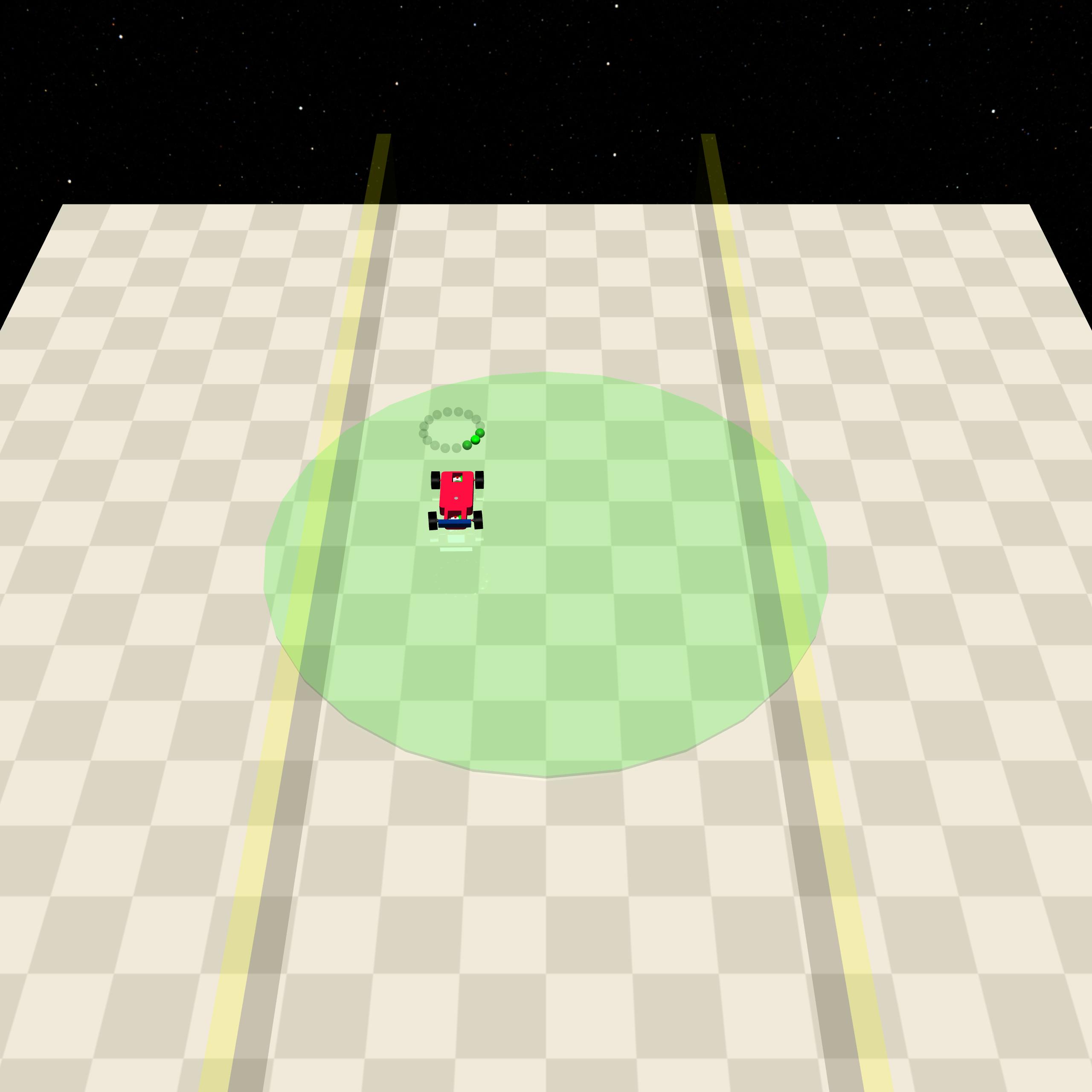
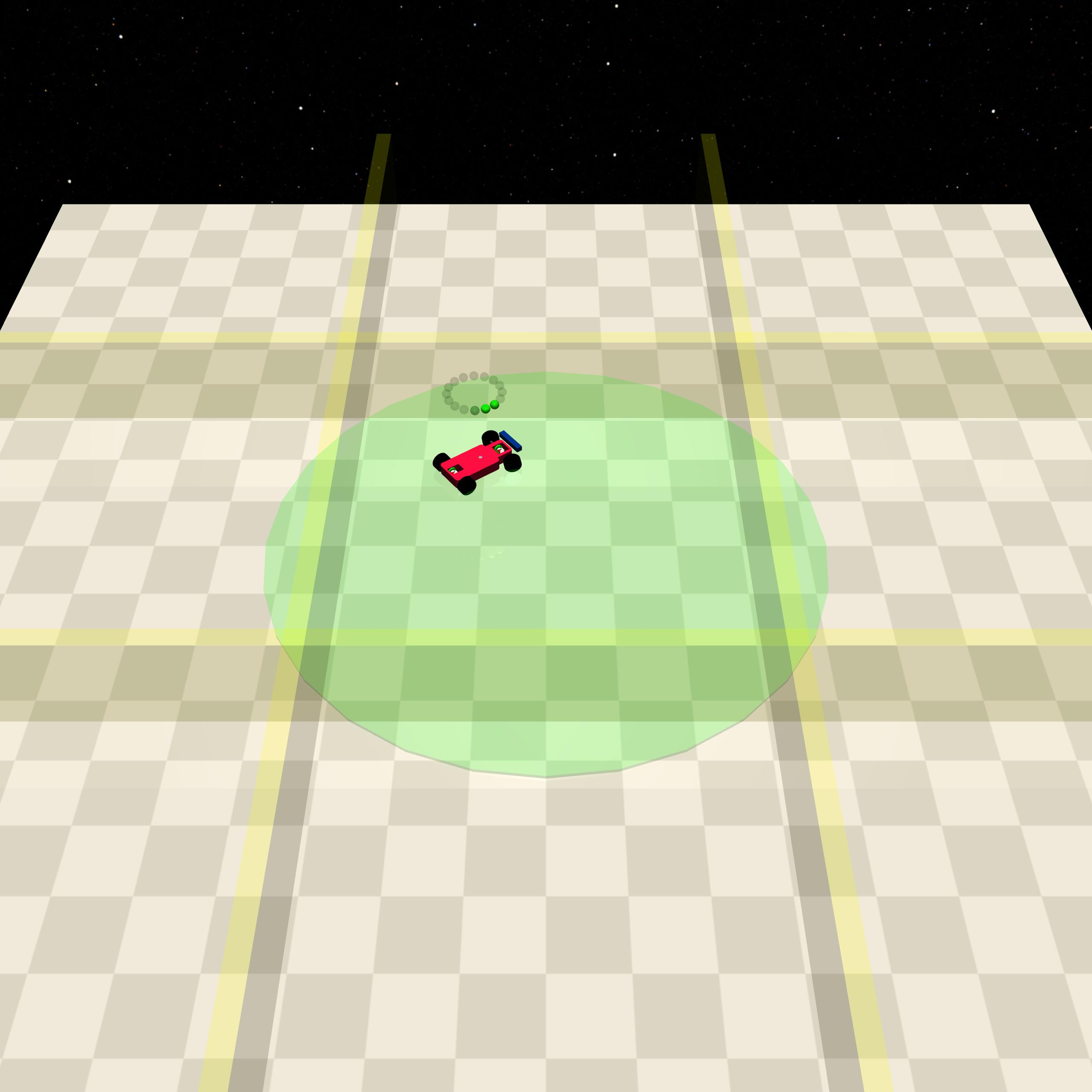
Here are some screenshots of the Safe Navigation tasks.
Agents

|
|

|
|
|
Tasks
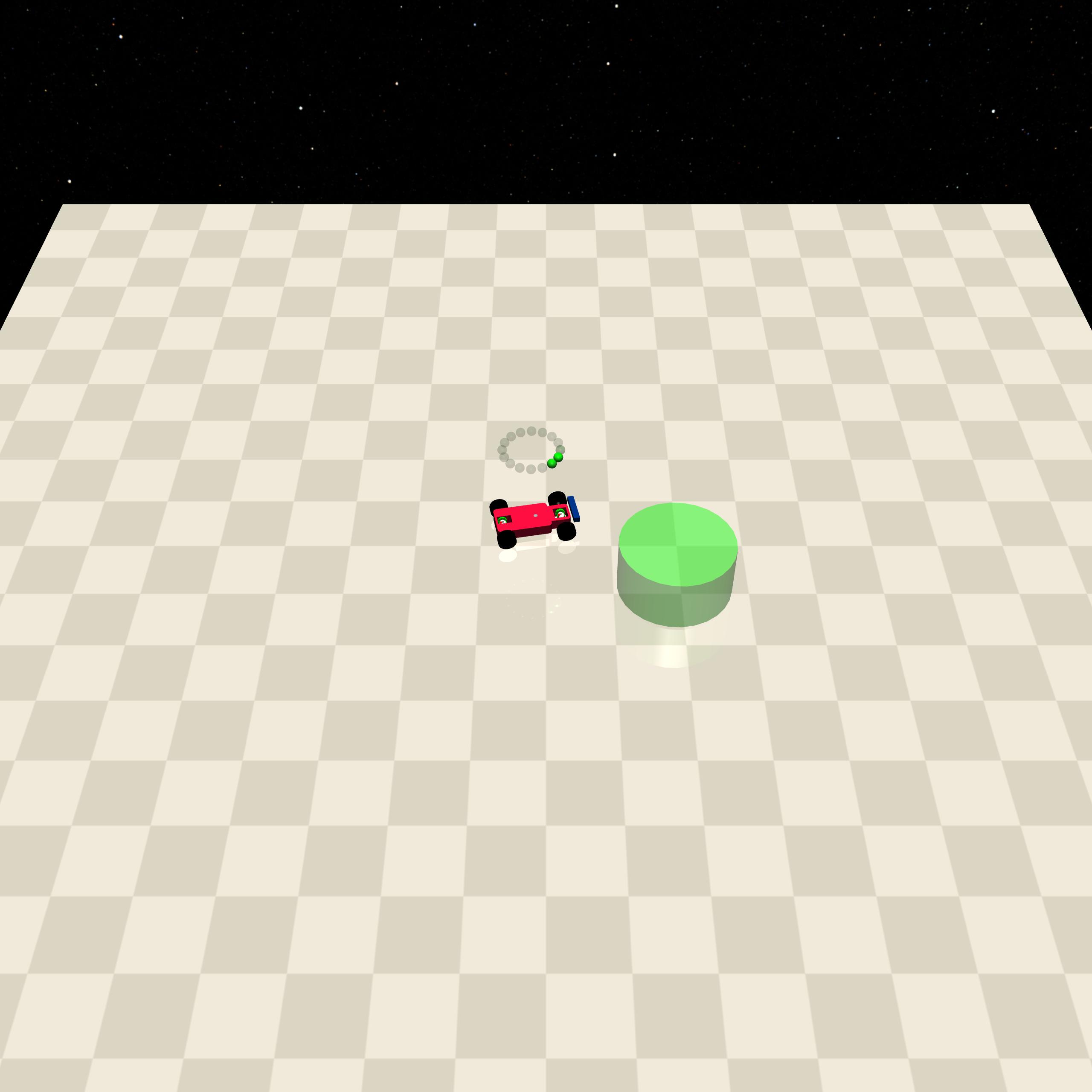
|
|
|
|
|
|
|
|
|
|
|
|
Vision-base Safe RL
Vision-based safety reinforcement learning lacks realistic scenarios.
Although the original Safety-Gym could minimally support visual input, the scenarios were too similar.
To facilitate the validation of visual-based safety reinforcement learning algorithms, we have developed a set of realistic vision-based SafeRL tasks, which are currently being validated on the baseline.
For the appetizer, the images are as follows:

Environment Usage
Notes: We support explicitly expressing the cost based on Gymnasium APIs.
The step method returns 6 items (next_obervation, reward, cost, terminated, truncated, info) with an extra cost field.
import safety_gymnasium
env_id = 'SafetyPointGoal1-v0'
env = safety_gymnasium.make(env_id)
obs, info = env.reset()
while True:
act = env.action_space.sample()
obs, reward, cost, terminated, truncated, info = env.step(act)
if terminated or truncated:
break
env.render()
We also provide two convenience wrappers for converting the Safety-Gymnasium environment to the standard Gymnasium API and vice versa.
# Safety-Gymnasium API: step returns (next_obervation, reward, cost, terminated, truncated, info)
# Gymnasium API: step returns (next_obervation, reward, terminated, truncated, info) and cost is in the `info` dict associated with a str key `'cost'`
safety_gymnasium_env = safety_gymnasium.make(env_id)
gymnasium_env = safety_gymnasium.wrappers.SafetyGymnasium2Gymnasium(safety_gymnasium_env)
safety_gymnasium_env = safety_gymnasium.wrappers.Gymnasium2SafetyGymnasium(gymnasium_env)
Users can apply Gymnasium wrappers easily with:
import gymnasium
import safety_gymnasium
def make_safe_env(env_id):
safe_env = safety_gymnasium.make(env_id)
env = safety_gymnasium.wrappers.SafetyGymnasium2Gymnasium(safe_env)
env = gymnasium.wrappers.SomeWrapper1(env)
env = gymnasium.wrappers.SomeWrapper2(env, argname1=arg1, argname2=arg2)
...
env = gymnasium.wrappers.SomeWrapperN(env)
safe_env = safety_gymnasium.wrappers.Gymnasium2SafetyGymnasium(env)
return safe_env
or
import functools
import gymnasium
import safety_gymnasium
def make_safe_env(env_id):
return safety_gymnasium.wrappers.with_gymnasium_wrappers(
safety_gymnasium.make(env_id),
gymnasium.wrappers.SomeWrapper1,
functools.partial(gymnasium.wrappers.SomeWrapper2, argname1=arg1, argname2=arg2),
...,
gymnasium.wrappers.SomeWrapperN,
)
In addition, for all Safety-Gymnasium environments, we also provide corresponding Gymnasium environments with a suffix Gymnasium in the environment id. For example:
import gymnasium
import safety_gymnasium
safety_gymnasium.make('SafetyPointGoal1-v0') # step returns (next_obervation, reward, cost, terminated, truncated, info)
gymnasium.make('SafetyPointGoal1Gymnasium-v0') # step returns (next_obervation, reward, terminated, truncated, info)
Installation
Install from PyPI
pip install safety-gymnasium
Install from source
conda create -n <envname> python=3.8
conda activate <envname>
git clone https://github.com/PKU-Alignment/safety-gymnasium.git
cd safety-gymnasium
pip install -e .
Important Notes
If you failed to render on your server, you can try:
echo "export MUJOCO_GL=osmesa" >> ~/.bashrc
source ~/.bashrc
apt-get install libosmesa6-dev
apt-get install python3-opengl
Customize your environments
We construct a highly expandable framework of code so that you can easily comprehend it and design your environments to facilitate your research with no more than 100 lines of code on average.
For details, please refer to our documentation. Here is a minimal example:
# import the objects you want to use
# or you can define specific objects by yourself, just make sure obeying our specification
from safety_gymnasium.assets.geoms import Apples
from safety_gymnasium.bases import BaseTask
# inherit the basetask
class MytaskLevel0(BaseTask):
def __init__(self, config):
super().__init__(config=config)
# define some properties
self.num_steps = 500
self.agent.placements = [(-0.8, -0.8, 0.8, 0.8)]
self.agent.keepout = 0
self.lidar_conf.max_dist = 6
# add objects into environments
self.add_geoms(Apples(num=2, size=0.3))
def calculate_reward(self):
# implement your reward function
# Note: cost calculation is based on objects, so it's automatic
reward = 1
return reward
def specific_reset(self):
# depending on your task
def specific_step(self):
# depending on your task
def update_world(self):
# depending on your task
@property
def goal_achieved(self):
# depending on your task
Citing Safety-Gymnasium
If you find Safety-Gymnasium useful, please cite it in your publications.
@article{Safety-Gymnasium,
author = {Jiaming Ji and Borong Zhang and Xuehai Pan and Jiayi Zhou and Juntao Dai and Yaodong Yang},
title = {Safety-Gymnasium},
year = {2023},
publisher = {GitHub},
journal = {GitHub repository},
howpublished = {\url{https://github.com/PKU-Alignment/safety-gymnasium}},
}
License
Safety-Gymnasium is released under Apache License 2.0.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file safety-gymnasium-1.0.0.tar.gz.
File metadata
- Download URL: safety-gymnasium-1.0.0.tar.gz
- Upload date:
- Size: 27.2 MB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.2 CPython/3.8.17
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
0d539571b4b9498b1e9332f42f262cb5801a90157c36f1549cbad73eca226c46
|
|
| MD5 |
9555370c226ed68a739b51945f4ba161
|
|
| BLAKE2b-256 |
5ed9c89c942c1fe3d199d5592913fe89562ecbf6fb49df8305c38050739c1f4b
|
File details
Details for the file safety_gymnasium-1.0.0-py3-none-any.whl.
File metadata
- Download URL: safety_gymnasium-1.0.0-py3-none-any.whl
- Upload date:
- Size: 27.3 MB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.2 CPython/3.8.17
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
1efb19de9316bde563df887660e6be0da98e3962058fe60a0f8db5bffb9e0fe0
|
|
| MD5 |
c32fcc4a244083fc2fa421690c2c125e
|
|
| BLAKE2b-256 |
b179de1f26e1cdeb96032ef55e4f69ca12d0c3afa6fa8331b3c75f86bf6785da
|







