Segmentation support piepeline for Musket ML


Project description
Segmentation Training Pipeline

This package is a part of Musket ML framework.
Reasons to use Segmentation Pipeline
Segmentation Pipeline was developed with a focus of enabling to make fast and simply-declared experiments, which can be easily stored, reproduced and compared to each other.
Segmentation Pipeline has a lot of common parts with Generic pipeline, but it is easier to define an architecture of the network. Also there are a number of segmentation-specific features.
The pipeline provides the following features:
- Allows to describe experiments in a compact and expressive way
- Provides a way to store and compare experiments in order to methodically find the best deap learning solution
- Easy to share experiments and their results to work in a team
- Experiment configurations are separated from model definitions
- It is easy to configure network architecture
- Provides great flexibility and extensibility via support of custom substances
- Common blocks like an architecture, callbacks, model metrics, predictions vizualizers and others should be written once and be a part of a common library
Installation
pip install segmentation_pipeline
Note: this package requires python 3.6
This package is a part of Musket ML framework, it is recommended to install the whole collection of the framework packages at once using instructions here.
Launching
Launching experiments
fit.py script is designed to launch experiment training.
In order to run the experiment or a number of experiments,
A typical command line may look like this:
musket fit --project "path/to/project" --name "experiment_name" --num_gpus=1 --gpus_per_net=1 --num_workers=1 --cache "path/to/cache/folder"
--project points to the root of the project
--name is the name of the project sub-folder containing experiment yaml file.
--num_gpus sets number of GPUs to use during experiment launch.
--gpus_per_net is a maximum number of GPUs to use per single experiment.
--num_workers sets number of workers to use.
--cache points to a cache folder to store the temporary data.
Other parameters can be found in the fit script reference
Launching tasks
task.py script is designed to launch experiment training.
Tasks must be defined in the project python scope and marked by an annotation like this:
from musket_core import tasks, model
@tasks.task
def measure2(m: model.ConnectedModel):
return result
Working directory must point to the musket_core root folder.
In order to run the experiment or a number of experiments,
A typical command line may look like this:
python -m musket_core.task --project "path/to/project" --name "experiment_name" --task "task_name" --num_gpus=1 --gpus_per_net=1 --num_workers=1 --cache "path/to/cache/folder"
--project points to the root of the project
--name is the name of the project sub-folder containing experiment yaml file.
--task is the name of the task function.
--num_gpus sets number of GPUs to use during experiment launch.
--gpus_per_net is a maximum number of GPUs to use per single experiment.
--num_workers sets number of workers to use.
--cache points to a cache folder to store the temporary data.
Other parameters can be found in the task script reference
Launching project analysis
analize.py script is designed to launch project-scope analysis.
Note that only experiments, which training is already finished will be covered.
musket analize --inputFolder "path/to/project"
--inputFolder points to a folder to search for finished experiments in. Typically, project root.
Other parameters can be found in the analyze script reference
Usage guide
Training a model
Let's start from the absolutely minimalistic example. Let's say that you have two folders, one of them contains jpeg images, and another one - png files with segmentation masks for these images. And you need to train a neural network that will do segmentation for you. In this extremely simple setup all that you need is to type following 5 lines of python code:
from segmentation_pipeline.impl.datasets import SimplePNGMaskDataSet
from segmentation_pipeline import segmentation
ds=SimplePNGMaskDataSet("./pics/train","./pics/train_mask")
cfg = segmentation.parse("config.yaml")
cfg.fit(ds)
Looks simple, but there is a config.yaml file in the code, and probably it is the place where everything actually happens.
backbone: mobilenetv2 #let's select classifier backbone for our network
architecture: DeepLabV3 #let's select segmentation architecture that we would like to use
augmentation:
Fliplr: 0.5 #let's define some minimal augmentations on images
Flipud: 0.5
classes: 1 #we have just one class (mask or no mask)
activation: sigmoid #one class means that our last layer should use sigmoid activation
encoder_weights: pascal_voc #we would like to start from network pretrained on pascal_voc dataset
shape: [320, 320, 3] #This is our desired input image and mask size, everything will be resized to fit.
testSplit: 0.4
optimizer: Adam #Adam optimizer is a good default choice
batch: 16 #Our batch size will be 16
metrics: #We would like to track some metrics
- binary_accuracy
- iou
primary_metric: val_binary_accuracy #and the most interesting metric is val_binary_accuracy
callbacks: #Let's configure some minimal callbacks
EarlyStopping:
patience: 15
monitor: val_binary_accuracy
verbose: 1
ReduceLROnPlateau:
patience: 4
factor: 0.5
monitor: val_binary_accuracy
mode: auto
cooldown: 5
verbose: 1
loss: binary_crossentropy #We use simple binary_crossentropy loss
stages:
- epochs: 100 #Let's go for 100 epochs
So as you see, we have decomposed our task in two parts, code that actually trains the model and experiment configuration, which determines the model and how it should be trained from the set of predefined building blocks.
Moreover, the whole fitting and prediction process can be launched with built-in script, the only really required python code is dataset definition to let the system know, which data to load.
What does this code actually do behind the scenes?
- it splits your data into 5 folds, and trains one model per fold;
- it takes care of model checkpointing, generates example image/mask/segmentation triples, collects training metrics. All this data will
be stored in the folders just near your
config.yaml; - All your folds are initialized from fixed default seed, so different experiments will use exactly the same train/validation splits
Also, datasets can be specified directly in your config file in more generic way, see examples ds_1, ds_2, ds_3 in "segmentation_training_pipeline/examples/people" folder. In this case you can just call cfg.fit() without providing dataset programmatically.
Lets discover what's going on in more details:
General train properties
Lets take our standard example and check the following set of instructions:
testSplit: 0.4
optimizer: Adam #Adam optimizer is a good default choice
batch: 16 #Our batch size will be 16
metrics: #We would like to track some metrics
- binary_accuracy
- iou
primary_metric: val_binary_accuracy #and the most interesting metric is val_binary_accuracy
loss: binary_crossentropy #We use simple binary_crossentropy loss
testSplit Splits the train set into two parts, using one part for train and leaving the other untouched for a later testing. The split is shuffled.
optimizer sets the optimizer.
batch sets the training batch size.
metrics sets the metrics to track during the training process. Metric calculation results will be printed in the console and to metrics folder of the experiment.
primary_metric Metric to track during the training process. Metric calculation results will be printed in the console and to metrics folder of the experiment.
Besides tracking, this metric will be also used by default for metric-related activity, in example, for decision regarding which epoch results are better.
loss sets the loss function. if your network has multiple outputs, you also may pass a list of loss functions (one per output)
Framework supports composing loss as a weighted sum of predefined loss functions. For example, following construction
loss: binary_crossentropy+0.1*dice_loss
will result in loss function which is composed from binary_crossentropy and dice_loss functions.
There are many more properties to check in Reference of root properties
Defining architecture
Lets take a look at the following part of our example:
backbone: mobilenetv2 #let's select classifier backbone for our network
architecture: DeepLabV3 #let's select segmentation architecture that we would like to use
classes: 1 #we have just one class (mask or no mask)
activation: sigmoid #one class means that our last layer should use sigmoid activation
encoder_weights: pascal_voc #we would like to start from network pretrained on pascal_voc dataset
shape: [320, 320, 3] #This is our desired input image and mask size, everything will be resized to fit.
The following three properties are required to set:
backbone This property configures encoder that should be used. Different kinds of FPN, PSP, Linkenet, UNet and more are supported.
architecture This property configures decoder architecture that should be used. net, Linknet, PSP, FPN and more are supported.
classes sets the number of classes that should be used.
The following ones are optional, but commonly used:
activation sets activation function that should be used in last layer.
shape set the desired shape of the input picture and mask, in the form heigth, width, number of channels. Input will be resized to fit.
encoder_weights configures initial weights of the encoder.
Image and Mask Augmentations
Framework uses awesome imgaug library for augmentation, so you only need to configure your augmentation process in declarative way like in the following example:
augmentation:
Fliplr: 0.5
Flipud: 0.5
Affine:
scale: [0.8, 1.5] #random scalings
translate_percent:
x: [-0.2,0.2] #random shifts
y: [-0.2,0.2]
rotate: [-16, 16] #random rotations on -16,16 degrees
shear: [-16, 16] #random shears on -16,16 degrees
augmentation property defines IMGAUG transformations sequence. Each object is mapped on IMGAUG transformer by name, parameters are mapped too.
In this example, Fliplr and Flipud keys are automatically mapped on Flip agugmenters,
their 0.5 parameter is mapped on the first p parameter of the augmenter.
Named parameters are also mapped, in example scale key of Affine is mapped on scale parameter of Affine augmenter.
One interesting augementation option when doing background removal task is replacing backgrounds with random
images. We support this with BackgroundReplacer augmenter:
augmentation:
BackgroundReplacer:
path: ./bg #path to folder with backgrounds
rate: 0.5 #fraction of original backgrounds to preserve
Freezing and Unfreezing encoder
Freezing encoder is often used with transfer learning. If you want to start with frozen encoder just add
freeze_encoder: true
stages:
- epochs: 10 #Let's go for 10 epochs with frozen encoder
- epochs: 100 #Now let's go for 100 epochs with trainable encoder
unfreeze_encoder: true
in your experiments configuration, then on some stage configuration just add
unfreeze_encoder: true
to stage settings.
Both freeze_encoder and unfreeze_encoder can be put into the root section and inside the stage.
Note: This option is not supported for DeeplabV3 architecture.
Custom datasets
Training data and masks are not necessarily stored in files, so sometimes you need to declare your own dataset class, for example, the following code was used to support Airbus ship detection challenge to decode segmentation masks from rle encoded strings stored in csv file
from segmentation_pipeline.impl.datasets import PredictionItem
import os
from segmentation_pipeline.impl import rle
import imageio
import pandas as pd
class SegmentationRLE(datasets.DataSet):
def __init__(self,path,imgPath):
self.data=pd.read_csv(path);
self.values=self.data.values;
self.imgPath=imgPath;
self.ship_groups=self.data.groupby('ImageId');
self.masks=self.ship_groups['ImageId'];
self.ids=list(self.ship_groups.groups.keys())
pass
def __len__(self):
return len(self.masks)
def __getitem__(self, item):
pixels=self.ship_groups.get_group(self.ids[item])["EncodedPixels"]
return PredictionItem(self.ids[item] + str(), imageio.imread(os.path.join(self.imgPath,self.ids[item])),
rle.masks_as_image(pixels) > 0.5)
def getTrain()->datasets.DataSet:
return SegmentationRLE("train.csv","images/")
Now, if this python code sits somewhere in python files located in modules folder of the project, and that file is referred by imports instruction, following YAML can refer it:
dataset:
getTrain: []
dataset sets the main training dataset.
datasets sets up a list of available data sets to be referred by other entities.
Multistage training
Sometimes you need to split your training into several stages. You can easily do it by adding several stage entries in your experiment configuration file.
stages instruction allows to set up stages of the train process, where for each stage it is possible to set some specific training options like the number of epochs, learning rate, loss, callbacks, etc. Full list of stage properties can be found here.
stages:
- epochs: 100 #Let's go for 100 epochs
- epochs: 100 #Let's go for 100 epochs
- epochs: 100 #Let's go for 100 epochs
stages:
- epochs: 6 #Train for 6 epochs
negatives: none #do not include negative examples in your training set
validation_negatives: real #validation should contain all negative examples
- lr: 0.0001 #let's use different starting learning rate
epochs: 6
negatives: real
validation_negatives: real
- loss: lovasz_loss #let's override loss function
lr: 0.00001
epochs: 6
initial_weights: ./fpn-resnext2/weights/best-0.1.weights #let's load weights from this file
Balancing your data
One common case is the situation when part of your images does not contain any objects of interest, like in Airbus ship detection challenge. More over your data may be to heavily inbalanced, so you may want to rebalance it. Alternatively you may want to inject some additional images that do not contain objects of interest to decrease amount of false positives that will be produced by the framework.
These scenarios are supported by negatives and validation_negatives settings of training stage configuration, these settings accept following values:
- none - exclude negative examples from the data
- real - include all negative examples
- integer number(1 or 2 or anything), how many negative examples should be included per one positive example
stages:
- epochs: 6 #Train for 6 epochs
negatives: none #do not include negative examples in your training set
validation_negatives: real #validation should contain all negative examples
- lr: 0.0001 #let's use different starting learning rate
epochs: 6
negatives: real
validation_negatives: real
- loss: lovasz_loss #let's override loss function
lr: 0.00001
epochs: 6
initial_weights: ./fpn-resnext2/weights/best-0.1.weights #let's load weights from this file
if you are using this setting your dataset class must support isPositive method which returns true for indexes
which contain positive examples:
def isPositive(self, item):
pixels=self.ddd.get_group(self.ids[item])["EncodedPixels"]
for mask in pixels:
if isinstance(mask, str):
return True;
return False
Advanced learning rates
Dynamic learning rates

As told in Cyclical learning rates for training neural networks CLR policies can provide quicker converge for some neural network tasks and architectures.
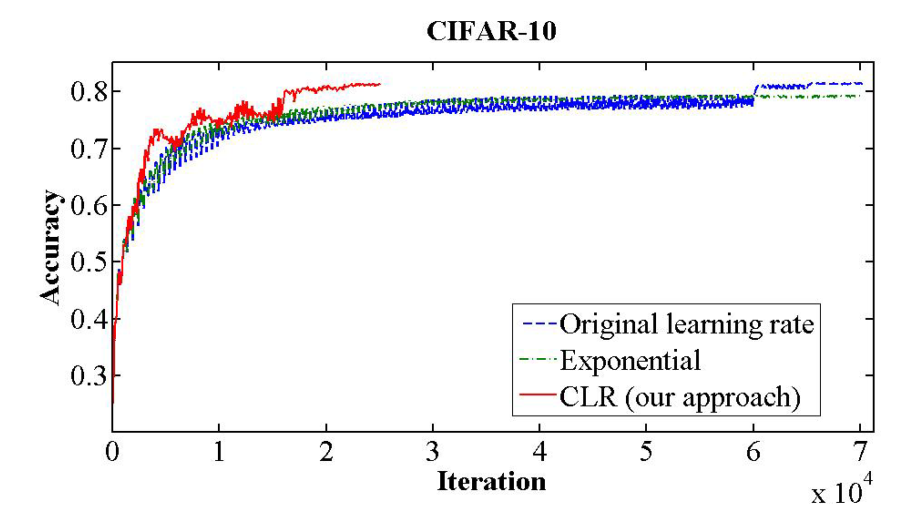
We support them by adopting Brad Kenstler CLR callback for Keras.
If you want to use them, just add CyclicLR in your experiment configuration file as shown below:
callbacks:
EarlyStopping:
patience: 40
monitor: val_binary_accuracy
verbose: 1
CyclicLR:
base_lr: 0.0001
max_lr: 0.01
mode: triangular2
step_size: 300
There are also ReduceLROnPlateau and LRVariator options to modify learning rate on the fly.
LR Finder
Estimating optimal learning rate for your model is an important thing, we support this by using slightly changed version of Pavel Surmenok - Keras LR Finder
cfg= segmentation.parse(people-1.yaml)
ds=SimplePNGMaskDataSet("./train","./train_mask")
finder=cfg.lr_find(ds,start_lr=0.00001,end_lr=1,epochs=5)
finder.plot_loss(n_skip_beginning=20, n_skip_end=5)
plt.show()
finder.plot_loss_change(sma=20, n_skip_beginning=20, n_skip_end=5, y_lim=(-0.01, 0.01))
plt.show()
will result in this couple of helpful images:


Training on crops
Your images can be too large to train model on them. In this case you probably want to train model on crops. All that you need to do is to specify number of splits per axis. For example, following lines in config
shape: [768, 768, 3]
crops: 3
will lead to splitting each image/mask into 9 cells (3 horizontal splits and 3 vertical splits) and training model on these splits. Augmentations will be run separately on each cell. crops property sets the number of single dimension cells.
During prediction time, your images will be split into these cells, prediction will be executed on each cell, and then results will be assembled in single final mask. Thus the whole process of cropping will be invisible from a consumer perspective.
Using trained model
Okey, our model is trained, now we need to actually do image segmentation. Let's say, we need to run image segmentation on images in the directory and store results in csv file:
from segmentation_pipeline import segmentation
from segmentation_pipeline.impl.rle import rle_encode
from skimage.morphology import remove_small_objects, remove_small_holes
import pandas as pd
#this is our callback which is called for every image
def onPredict(file_name, img, data):
threshold = 0.25
predictions = data["pred"]
imgs = data["images"]
post_img = remove_small_holes(remove_small_objects(img.arr > threshold))
rle = rle_encode(post_img)
predictions.append(rle)
imgs.append(file_name[:file_name.index(".")])
pass
cfg= segmentation.parse("config.yaml")
predictions = []
images = []
#Now let's use best model from fold 0 to do image segmentation on images from images_to_segment
cfg.predict_in_directory("./images_to_segment", 0, 0, onPredict, {"pred": predictions, "images": images})
#Let's store results in csv
df = pd.DataFrame.from_dict({'image': images, 'rle_mask': predictions})
df.to_csv('baseline_submission.csv', index=False)
Ensembling predictions
And what if you want to ensemble models from several folds? Just pass a list of fold numbers to
predict_in_directory like in the following example:
cfg.predict_in_directory("./images_to_segment", [0,1,2,3,4], onPredict, {"pred": predictions, "images": images})
Another supported option is to ensemble results from extra test time augmentation (flips) by adding keyword arg ttflips=True.
Custom evaluation code
Sometimes you need to run custom evaluation code. In such case you may use: evaluateAll method, which provides an iterator
on the batches containing original images, training masks and predicted masks
for batch in cfg.evaluateAll(ds,2):
for i in range(len(batch.predicted_maps_aug)):
masks = ds.get_masks(batch.data[i])
for d in range(1,20):
cur_seg = binary_opening(batch.predicted_maps_aug[i].arr > d/20, np.expand_dims(disk(2), -1))
cm = rle.masks_as_images(rle.multi_rle_encode(cur_seg))
pr = f2(masks, cm);
total[d]=total[d]+pr
Accessing model
You may get trained keras model by calling: cfg.load_model(fold, stage).
Analyzing experiments results
Okey, we have done a lot of experiments and now we need to compare the results and understand what works better. This repository contains script which may be used to analyze folder containing sub folders with experiment configurations and results. This script gathers all configurations, diffs them by doing structural diff, then for each configuration it averages metrics for all folds and generates csv file containing metrics and parameters that was actually changed in your experiment like in the following example
This script accepts following arguments:
- inputFolder - root folder to search for experiments configurations and results
- output - file to store aggregated metrics
- onlyMetric - if you specify this option all other metrics will not be written in the report file
- sortBy - metric that should be used to sort results
Example:
python analize.py --inputFolder ./experiments --output ./result.py
What is supported?
At this moment segmentation pipeline supports following architectures:
FPN, PSP, Linkenet, UNet architectures support following backbones:
- VGGNet
- vgg16
- vgg19
- ResNet
- resnet18
- resnet34
- resnet50
- resnet101
- resnet152
- ResNext
- resnext50
- resnext101
- DenseNet
- densenet121
- densenet169
- densenet201
- Inception-v3
- Inception-ResNet-v2
All them support the weights pretrained on ImageNet:
encoder_weights: imagenet
At this moment DeeplabV3 architecture supports following backbones:
Deeplab supports weights pretrained on PASCAL VOC:
encoder_weights: pascal_voc
Each architecture also supports some specific options, list of options is documented in segmentation RAML library.
Supported augmentations are documented in augmentation RAML library.
Callbacks are documented in callbacks RAML library.
Custom architectures, callbacks, metrics
Segmentation pipeline uses keras custom objects registry to find entities, so if you need to use custom loss function, activation or metric all that you need to do is to register it in Keras as:
keras.utils.get_custom_objects()["my_loss"]= my_loss
If you want to inject new architecture, you should register it in segmentation.custom_models dictionary.
For example:
segmentation.custom.models['MyUnet']=MyUnet
where MyUnet is a function that accepts architecture parameters as arguments and returns an instance
of keras model.
Examples
Training background removal task(Pics Art Hackaton) in google collab
FAQ
How to continue training after crash?
If you would like to continue training after crash, call setAllowResume method before calling fit
cfg= segmentation.parse("./people-1.yaml")
cfg.setAllowResume(True)
ds=SimplePNGMaskDataSet("./pics/train","./pics/train_mask")
cfg.fit(ds)
My notebooks constantly run out of memory, what can I do to reduce memory usage?
One way to reduce memory usage is to limit augmentation queue limit which is 50 by default, like in the following example:
segmentation_pipeline.impl.datasets.AUGMENTER_QUEUE_LIMIT = 3
How can I run sepate set of augmenters on initial image/mask when replacing backgrounds with Background Augmenter?
BackgroundReplacer:
rate: 0.5
path: ./bg
augmenters: #this augmenters will run on original image before replacing background
Affine:
scale: [0.8, 1.5]
translate_percent:
x: [-0.2,0.2]
y: [-0.2,0.2]
rotate: [-16, 16]
shear: [-16, 16]
erosion: [0,5]
How can I visualize images that are used for training (after augmentations)?
You should set showDataExamples to True like in the following sample
cfg= segmentation.parse("./no_erosion_aug_on_masks/people-1.yaml")
cfg.showDataExamples=True
if will lead to generation of training images samples and storing them in examples folder at the end of each epoch
What I can do if i have some extra training data, that should not be included into validation, but should be used during the training?
extra_data=NotzeroSimplePNGMaskDataSet("./phaces/all","./phaces/masks") #My dataset that should be added to training
segmentation.extra_train["people"] = extra_data
and in the config file:
extra_train_data: people
How to get basic statistics across my folds/stages
This code sample will return primary metric stats over folds/stages
cfg= segmentation.parse("./no_erosion_aug_on_masks/people-1.yaml")
metrics = cfg.info()
I have some callbacks that are configured globally, but I need some extra callbacks for my last training stage?
There are two possible ways how you may configure callbacks on stage level:
- override all global callbacks with
callbackssetting. - add your own custom callbacks with
extra_callbackssetting.
In the following sample CyclingRL callback is only appended to the sexond stage of training:
loss: binary_crossentropy
stages:
- epochs: 20
negatives: real
- epochs: 200
extra_callbacks:
CyclicLR:
base_lr: 0.000001
max_lr: 0.0001
mode: triangular
step_size: 800
negatives: real
What if I would like to build a really large ansemble of models?
One option to do this, is to store predictions for each file and model in numpy array, and then sum these predictions like in the following sample:
cfg.predict_to_directory("./pics/test","./pics/arr1", [0, 1, 4, 2], 1, ttflips=True,binaryArray=True)
cfg.predict_to_directory("./pics/test", "./pics/arr", [0, 1, 4, 2], 2, ttflips=True, binaryArray=True)
segmentation.ansemblePredictions("./pics/test",["./pics/arr/","./pics/arr1/"],onPredict,d)
How to train on multiple gpus?
cfg.gpus=4 #or another number matching to the count of gpus that you have
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file segmentation_pipeline-0.432.tar.gz.
File metadata
- Download URL: segmentation_pipeline-0.432.tar.gz
- Upload date:
- Size: 45.5 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/1.12.1 pkginfo/1.4.2 requests/2.22.0 setuptools/41.4.0 requests-toolbelt/0.8.0 tqdm/4.36.1 CPython/3.6.5
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
acf8a05bb7d0f128544cea7718fc55c5aa9ea554c8631ad64f8b039f1f5c098f
|
|
| MD5 |
5a754814d2b1d42cb4425474bee1019f
|
|
| BLAKE2b-256 |
4d0a0dee09f1f66c04a294fe1f6844ea01d80181d232d9dfcc92d0009eeeb9ce
|
File details
Details for the file segmentation_pipeline-0.432-py2.py3-none-any.whl.
File metadata
- Download URL: segmentation_pipeline-0.432-py2.py3-none-any.whl
- Upload date:
- Size: 36.4 kB
- Tags: Python 2, Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/1.12.1 pkginfo/1.4.2 requests/2.22.0 setuptools/41.4.0 requests-toolbelt/0.8.0 tqdm/4.36.1 CPython/3.6.5
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
c03afb8e3c76c5875901c79c3718bb96c3799a7a3464d065d5677df630dd09f1
|
|
| MD5 |
df67eb0030c2a164002186f909cb1f83
|
|
| BLAKE2b-256 |
30ef3984917957d1fca1224915cf785604d896be26fd04bb3f0b6c7731c04224
|







