StarDist Napari Plugin




This project provides the napari plugin for StarDist, a deep learning based 2D and 3D object detection method with star-convex shapes. StarDist has originally been developed (see papers) for the segmentation of densely packed cell nuclei in challenging images with low signal-to-noise ratios. The plugin allows to apply pretrained and custom trained models from within napari.
If you use this plugin for your research, please cite us.
Installation
Install the plugin with pip install stardist-napari or from within napari via Plugins > Install/Uninstall Plugins…. If you want GPU-accelerated prediction, please read the more detailed installation instructions for StarDist.
- You can activate the plugin in napari via
Plugins > stardist-napari: StarDist. - Example images for testing are provided via
File > Open Sample > stardist-napari.
Documentation
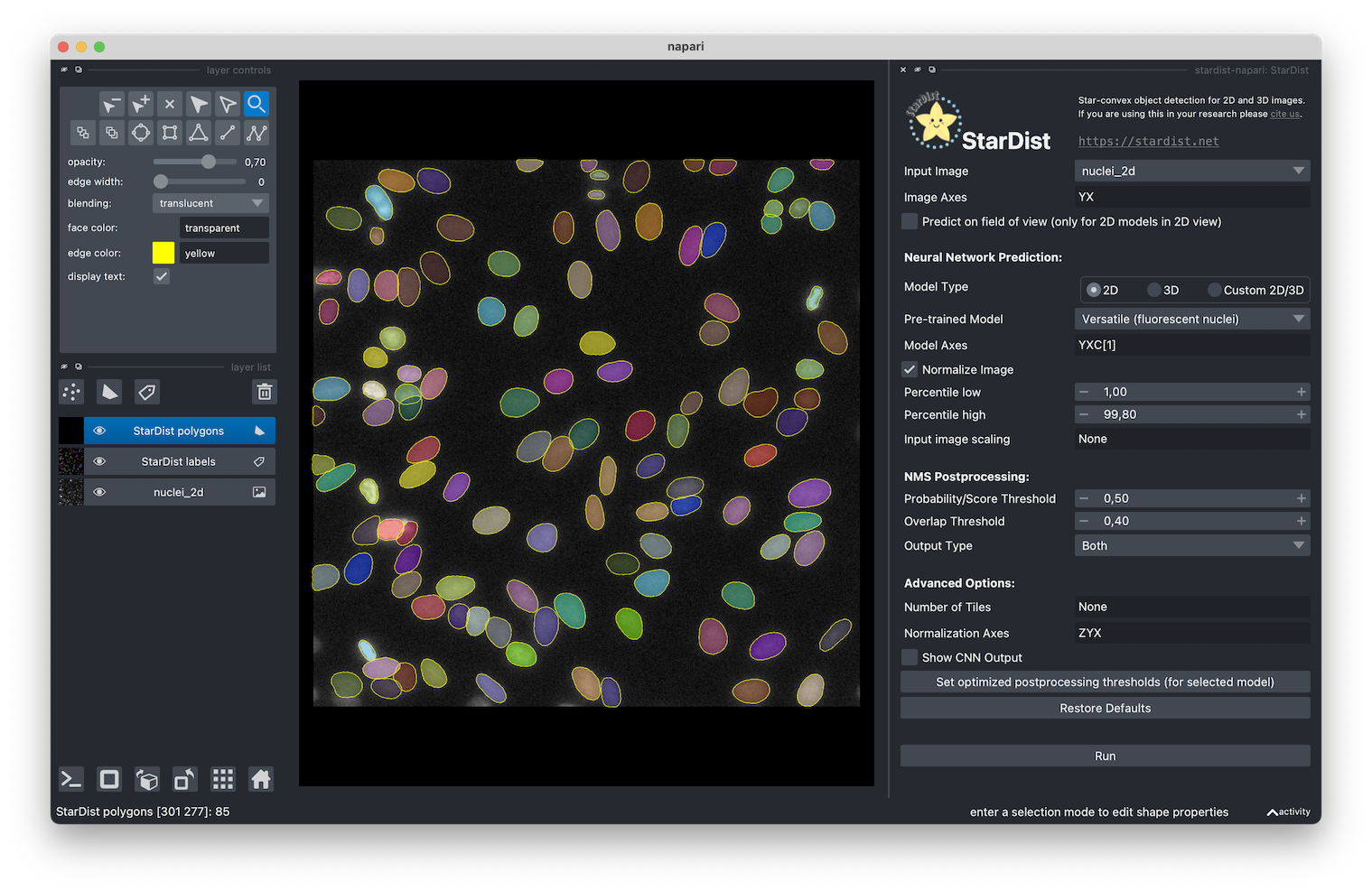
The two main buttons at the bottom of the plugin are (see right side of screenshot above):
Restore Defaults: Restore default values for inputs (exceptions: Input Image, Image Axes, Custom Model).
Run: Start the prediction with the selected inputs and create the outputs when done.
All plugin activity is shown in the napari activity dock, which can be shown/hidden by clicking on the word activity next to the little arrow at the bottom right of the napari window.
Inputs
The plugin does perform input validation, i.e. it will disable the Run button if it detects a problem with the selected inputs. Problematic input fields are highlighted with a "lightcoral" background color 

Input Image: Select a napari layer of type Image as the input.
Tooltip: Shows the shape of the image.
Image Axes: String that describes the semantic image axes and their order, e.g. YX for a 2D image. This parameter is automatically chosen (i.e. guessed) when a new input image is selected and should work in most cases. Permissible axis values are: X (width/columns), Y (height/rows), Z (depth/planes), C (channels), T (frames/time).
Tooltip: Shows the mapping of semantic axes to the shape of the selected input image.
Predict on field of view (only for 2D models in 2D view): If enabled, the StarDist prediction is only applied to the current field of view of the napari viewer. As the name of this checkbox indicates, this only works for 2D StarDist models and when the napari viewer is in 2D viewing mode. The checkbox is not even shown if those conditions are not met.
Neural Network Prediction
Model Type: Choice whether to use registered pre-trained models (2D, 3D) or provide a path to a model folder (Custom 2D/3D). Based on this choice, either the input for Pre-trained Model or Custom Model is shown below.
(Further information regarding pre-trained models: how to register your own model, model registration in StarDist.)
Pre-trained Model: Select a registered pre-trained model from a list. The first time a model is selected, it is downloaded and cached locally.
Custom Model: Provide a path to a StarDist model folder, containing at least config.json and a compatible neural network weights file (with suffix .h5 or .hdf5). If present, thresholds.json is also loaded and its values can be used via the button Set optimized postprocessing thresholds (for selected model). If you want to use a model from bioimage.io, you first need to convert it to the regular StarDist model folder format (see how to do this here).
Model Axes: A read-only text field that shows the semantic axes that the currently selected model expects as input. Additionally, we show the number of expected input channels, e.g. YXC[2] to indicate that the model expects a 2D input image with 2 channels. Seeing the model axes is helpful to understand whether the axes of the input image are compatible or not.
Normalize Image: A checkbox to indicate whether to perform percentile-based input image normalization or not. This should be checked if the input image wasn't manually normalized such that most pixel values are in the range 0 to 1. If unchecked, inputs Percentile low and Percentile high are hidden.
Percentile low: Percentile value of input pixel distribution that is mapped to 0 (~min value). If there aren't any outlier pixels in your image, you may use percentile 0 to do a standard min-max image normalization.
Percentile high: Percentile value of input pixel distribution that is mapped to 1 (~max value). If there aren't any outlier pixels in your image, you may use percentile 100 to do a standard min-max image normalization.
Input image scaling: Number or list of numbers (one per input axis) to scale the input image before prediction and rescale the output accordingly. For example, a value of 0.5 indicates that all spatial axes are downscaled to half their size before prediction, and that the outputs are scaled to double their size. This is useful to adapt to different object sizes in the input image.
Tooltip: Shows the mapping of scale values to the semantic axes of the selected input image.
NMS Postprocessing
Probability/Score Threshold: Determine the number of object candidates to enter non-maximum suppression. Higher values lead to fewer segmented objects, but will likely avoid false positives. The selected model may have an associated threshold value, which can be loaded via the Set optimized postprocessing thresholds (for selected model) button.
Overlap Threshold: Determine when two objects are considered the same during non-maximum suppression. Higher values allow segmented objects to overlap substantially. The selected model may have an associated threshold value, which can be loaded via the Set optimized postprocessing thresholds (for selected model) button.
Output Type: Choose format of outputs (see below for details). Selecting Label Image will create the outputs StarDist labels and StarDist class labels (for multi-class models only) as napari Labels layers. Selecting Polygons / Polyhedra will instead return the output StarDist polygons as a napari Shapes layer for a 2D model, or StarDist polyhedra as a napari Surface layer for a 3D model. Selecting Both will return both types of outputs.
Advanced Options
Number of Tiles: String None (to disable tiling) or list of integer numbers (one per axis of input image) to determine how the input image is tiled before the CNN prediction is computed on each tile individually. This is needed to avoid (GPU) memory issues that can occur for large input images. Note that the NMS postprocessing is still run only once with candidates from the predictions of all image tiles.
Tooltip: Shows the mapping of tile values to the semantic axes of the selected input image.
Normalization Axes: String of semantic axes which are jointly normalized (if they are present in the input image). For example, the default value ZYX indicates that all spatial axes are always normalized together; if an image has multiple channels, the pixels will be normalized separately per channel (e.g. this is what typically makes sense for fluorescence microscopy where channels are independent). On the other hand, the channels in RGB color images typically need to be normalized jointly, hence using ZYXC makes sense in this case. Note: if an image is explicitly opened with rgb=True in napari, the channels are automatically normalized together.
Tooltip: Shows a brief explanation.
Time-lapse Labels: If the input is a time-lapse/movie, each frame is first independently processed by StarDist. If Separate per frame (no processing) is chosen, the object ids in the label images of each frame are not modified, i.e. they are consecutive integers that always start at 1. Selecting Unique through time will cause object ids to be unique over time, i.e. the smallest object id in a given frame is larger than the largest object id of the previous frame. Finally, choosing Match to previous frame (via overlap) will perform a simple form of greedy matching/tracking, where object ids are propagated from one frame to the next based on object overlap.
Show CNN Output: Create additional outputs (see below for details) StarDist probability and StarDist distances that show the direct results of the CNN prediction which are the inputs to the NMS postprocessing. Additionally, StarDist class probabilities is created for multi-class models.
Set optimized postprocessing thresholds (for selected model): Button to set Probability/Score Threshold and Overlap Threshold to the values provided by the selected model. Nothing is changed if the model does not provide threshold values.
Outputs
StarDist polygons: The detected/segmented 2D objects as polygons (napari Shapes layer).
StarDist polyhedra: The detected/segmented 3D objects as surfaces (napari Surface layer).
StarDist labels: The detected/segmented 2D/3D objects as a label image (napari Labels layer). In an integer-valued label image, the value of a given pixel denotes the id of the object that it belongs to. For example, all pixels with value 5 belong to the object with id 5. All background pixels (that don't belong to any object) have value 0.
StarDist class labels (multi-class models only): The classes of detected/segmented 2D/3D objects as a semantic segmentation labeling (napari Labels layer). The integer value of a given pixel denotes the class id of the object that it belongs to. For example, all pixels with value 3 belong to the object class 3. Note that all pixels that belong to a specific object instance (as returned by StarDist labels) do have the same object class here. All background pixels (that don't belong to an object class) have value 0.
StarDist probability: The object probabilities predicted by the neural network as a single-channel image (napari Image layer).
StarDist distances: The radial distances predicted by the neural network as a multi-channel image (napari Image layer).
StarDist class probabilities (multi-class models only): The object class probabilities predicted by the neural network as a multi-channel image (napari Image layer).
Troubleshooting & Support
- The image.sc forum is the best place to start getting help and support. Make sure to use the tag
stardist, since we are monitoring all questions with this tag. - For general questions about StarDist, it's worth taking a look at the frequently asked questions (FAQ).
- If you have technical questions or found a bug, feel free to open an issue.
Other resources
A demonstration of an earlier version of the plugin is shown in this video.
Many of the parameters are identical to those of our StarDist ImageJ/Fiji plugin, which are documented here.
2 maintainers
Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file stardist_napari-2024.8.6.1.tar.gz.
File metadata
- Download URL: stardist_napari-2024.8.6.1.tar.gz
- Upload date:
- Size: 48.7 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.1.1 CPython/3.12.4
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d5fb082f65fd174b3d0862fb471032e0570ed4f09cc0725ceed03ab3423590d9
|
|
| MD5 |
4f1813447d03819f03aa89edfa35f5ae
|
|
| BLAKE2b-256 |
e1e97cd40be1e484840ddcf70bd2167071b092619e6b4f475915c3d8c198d861
|
File details
Details for the file stardist_napari-2024.8.6.1-py3-none-any.whl.
File metadata
- Download URL: stardist_napari-2024.8.6.1-py3-none-any.whl
- Upload date:
- Size: 44.0 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.1.1 CPython/3.12.4
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
538c6f863c3ac556e014b984c9bfe803cb59a57bbba0033c1cbd15fe25a50414
|
|
| MD5 |
98aee015a1b16415865505c26a56ebd2
|
|
| BLAKE2b-256 |
ee9a86467ec88d76c57d0dc83b84133c3ef07b5041f8d72983aa66c0af2eb3ba
|









