A tiny inverse kinematics solver

Project description
tinyik is a simple and naive inverse kinematics solver.
It defines the actuator as a set of links and revolute joints from an origin. Here is the example of a robot arm that consists of two joints that rotate around z-axis and two links of 1.0 length along x-axis:
>>> import tinyik
>>> arm = tinyik.Actuator(['z', [1., 0., 0.], 'z', [1., 0., 0.]])Since the joint angles are zero by default, the end-effector position is at (2.0, 0, 0):
>>> arm.angles
array([ 0., 0.])
>>> arm.ee
array([ 2., 0., 0.])Sets the joint angles to 30 and 60 degrees to calculate a new position of the end-effector:
>>> import numpy as np
>>> arm.angles = [np.pi / 6, np.pi / 3] # or np.deg2rad([30, 60])
>>> arm.ee
array([ 0.8660254, 1.5 , 0. ])Sets a position of the end-effector to calculate the joint angles:
>>> arm.ee = [2 / np.sqrt(2), 2 / np.sqrt(2), 0.]
>>> arm.angles
array([ 7.85398147e-01, 3.23715739e-08])
>>> np.round(np.rad2deg(arm.angles))
array([ 45., 0.])Optionally, it has the visualization feature. Passes the actuator to it to visualize its structure:
>>> leg = tinyik.Actuator([[.3, .0, .0], 'z', [.3, .0, .0], 'x', [.0, -.5, .0], 'x', [.0, -.5, .0]])
>>> leg.angles = np.deg2rad([30, 45, -90])
>>> tinyik.visualize(leg)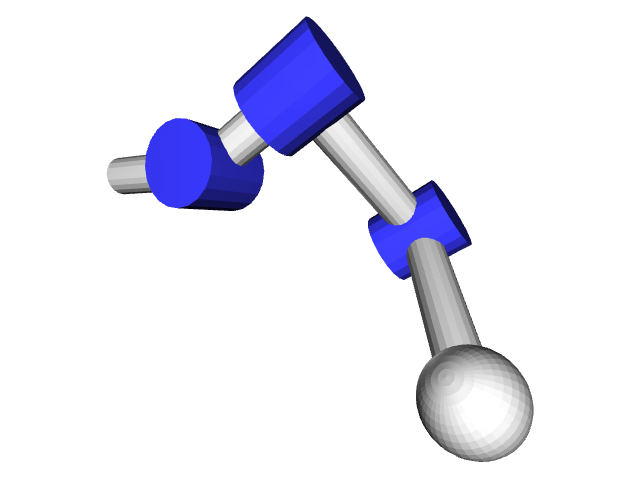
Passes with the target position, can compare before and after the IK. The gray links are before IK and the white links are after it. The red sphere is the target position:
>>> tinyik.visualize(leg, target=[.8, .0, .8])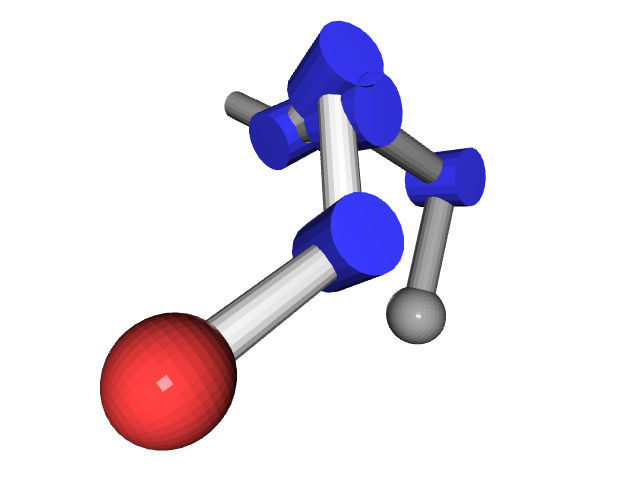
Installation
$ pip install tinyikWith the visualization feature:
$ pip install tinyik[viz]Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file tinyik-2.2.1.tar.gz.
File metadata
- Download URL: tinyik-2.2.1.tar.gz
- Upload date:
- Size: 7.8 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/1.0.5 CPython/3.8.2 Windows/10
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
a8898489afea50a5e81d790eb81adafd04d6f47e53282bcb027afe432dc10ef7
|
|
| MD5 |
479ebb72e3a10e82e2aa2d1327eb623c
|
|
| BLAKE2b-256 |
92b23755c90a221838b1d234770ee5da696dccfc4446371c7beff84857c3d5c1
|
File details
Details for the file tinyik-2.2.1-py3-none-any.whl.
File metadata
- Download URL: tinyik-2.2.1-py3-none-any.whl
- Upload date:
- Size: 8.5 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/1.0.5 CPython/3.8.2 Windows/10
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
f5bb07d5eb99a98dd95d937f1d39bfb009d6cc988381ac5f98582075006dd179
|
|
| MD5 |
392455d0ed3fe575427782ab50216644
|
|
| BLAKE2b-256 |
95329021c857f791ab91e470d840dd97d3567da4c1c20eeb881825fd542742b1
|







