Python module to control Upkie wheeled bipeds.

Project description
Upkie wheeled biped robot
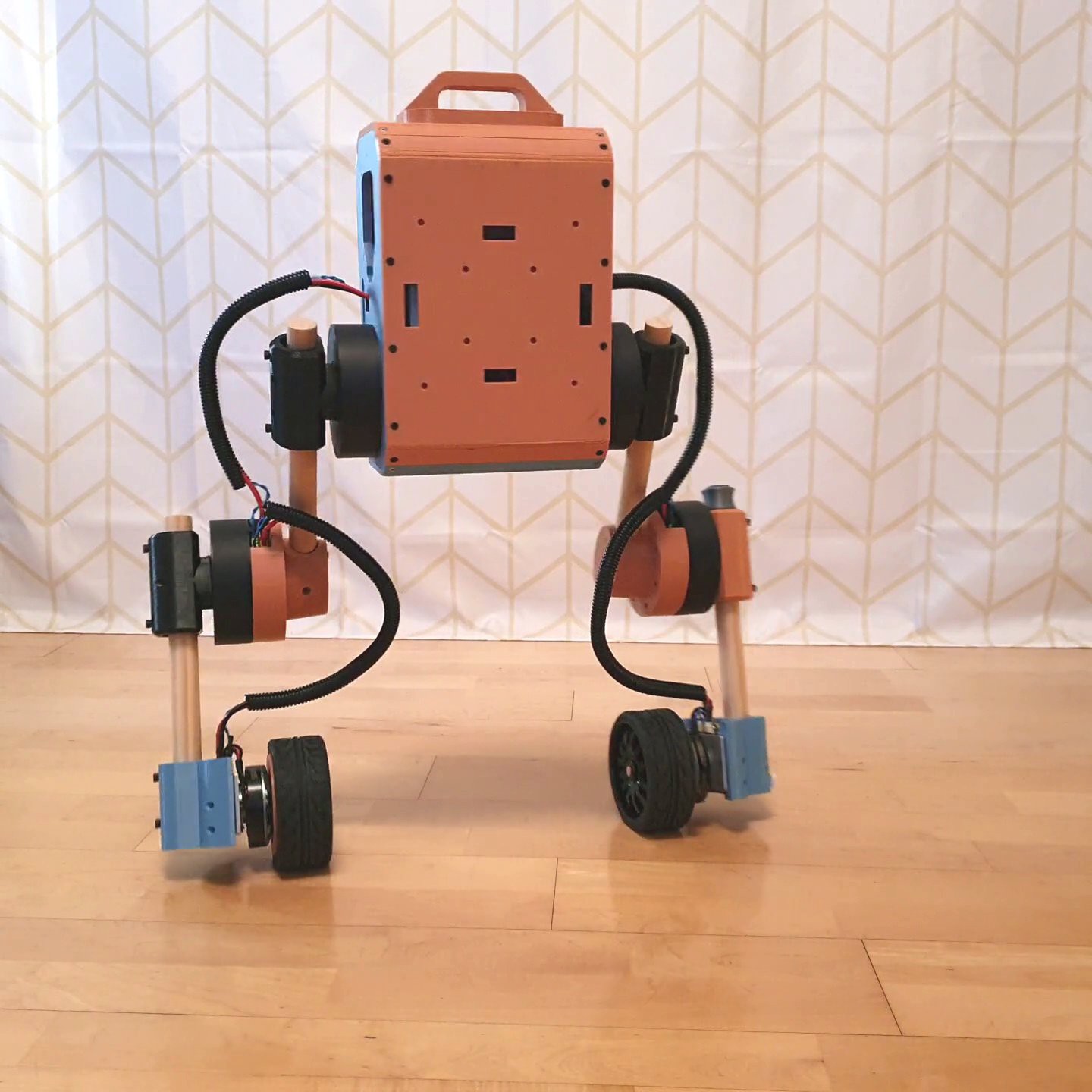






Upkie is a fully open source self-balancing wheeled biped robot. It has wheels for balancing, and legs to go off-road or negotiate uneven terrains. Upkies are designed to be buildable at home with tools and components ordered online, like mjbots actuators. Motion control runs onboard the robot's Raspberry Pi.
This repository contains all the software and instructions required to build and operate an Upkie. Development can be done in Python or C++, on Linux or macOS. Questions are welcome in the Chat and Discussions forum.
Installation
To code for Upkie in Python, just install:
pip install upkie
This Python interface is already fast enough for real-time control. If later on you want to optimize parts of your code, you can move them to C++ spines.
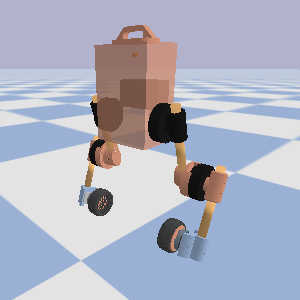
Simulation
Assuming you have a C++ compiler (setup one-liners: Fedora, Ubuntu), you can run an Upkie simulation right from the command line. It won't install anything on your machine, everything will run locally from the repository:
git clone https://github.com/upkie/upkie.git
cd upkie
./start_pid_balancer.sh
Click on the robot in the simulator window to apply external forces.
Example
You can develop your own agent using the Gymnasium environments distributed in upkie.envs. For example, here is a simple proportional-feedback balancer:
import gymnasium as gym
import upkie.envs
upkie.envs.register()
with gym.make("UpkieGroundVelocity-v3", frequency=200.0) as env:
observation = env.reset()
action = 0.0 * env.action_space.sample()
for step in range(1_000_000):
observation, reward, done, _ = env.step(action)
if done:
observation = env.reset()
pitch = observation[0]
action[0] = 10.0 * pitch
To test this agent on your computer, run the agent and simulation spine in two separate processes: python this_agent.py in one shell, and ./start_simulation.sh in the other.
To run this agent on the robot, scp the script to the Raspberry Pi, start a pi3hat spine and execute the script on the Pi itself.
To go further
- Build your own Upkie 🧰
- More examples
- Project log on Hackaday.io
- Software documentation
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file upkie-3.3.0.tar.gz.
File metadata
- Download URL: upkie-3.3.0.tar.gz
- Upload date:
- Size: 252.4 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: python-requests/2.25.1
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
df0c70c9a4c11f68a4f852df97f7d9789c08dfb8376750aaef677c0f51b3a891
|
|
| MD5 |
dbab4e6a34b9c8de4d248f9f8678e7a6
|
|
| BLAKE2b-256 |
e9b6435a5b8c0b3ceea1d8a772dcef6a75f83242918cbe24a73a3fbff4c587dc
|
File details
Details for the file upkie-3.3.0-py3-none-any.whl.
File metadata
- Download URL: upkie-3.3.0-py3-none-any.whl
- Upload date:
- Size: 63.0 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: python-requests/2.25.1
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
6a8e1b1197cbd354a1130b0be9cd127f8cc3f38e0c144eb19cc98ad871290997
|
|
| MD5 |
be7e95e81a0a11b6281a6fc42b937a9f
|
|
| BLAKE2b-256 |
9c7f529f8381501b3609f3da1909eea1d949351980a1257b4691ad8ff4415b9c
|







