Convert lh/rh z-score vector to FreeSurfer labelmap

Project description



Abstract
zlabelmap.py generates FreeSurfer labelmaps from z-score vector files. These labelmap files are used by FreeSurfer to color-code parcellated brain regions. By calculating a z-score to labelmap transform, we are able to show a heat map and hightlight brain regions that differ from some comparative reference, as demonstrasted below
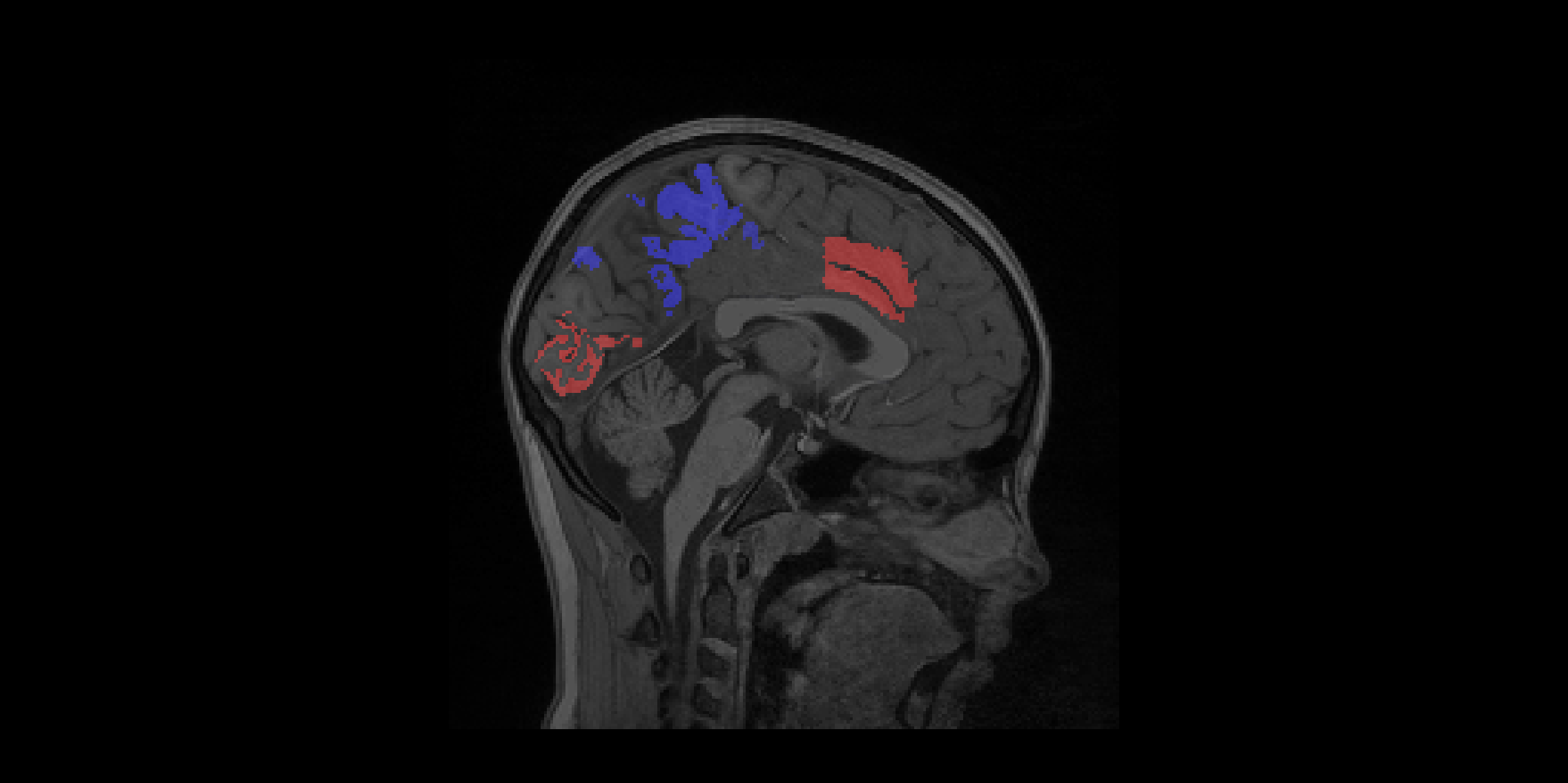
where positive volume deviations of a parcellated brain region are shown in red (i.e. the subject had a larger volume in that area than the reference), and negative volume deviations are shown in blue (i.e. the subject had a smaller volume in that area than reference).
Note that these are randomly generated z-scores purely for illustrative purposes.
Essentially the script consumes an input text vector file of
<str_structureName> <float_lh_zScore> <float_rh_zScore>for example,
G_and_S_frontomargin ,1.254318450576827,-0.8663546810093861
G_and_S_occipital_inf ,1.0823728865077271,-0.7703944006354377
G_and_S_paracentral ,0.20767669866335847,2.9023126278939912
G_and_S_subcentral ,2.395503357157743,-1.4966482475891556
G_and_S_transv_frontopol ,-1.7849555258577423,-2.461419463760234
G_and_S_cingul-Ant ,-2.3831737860960382,1.1892593438667625
G_and_S_cingul-Mid-Ant ,0.03381695289572084,-0.7909116233500506
G_and_S_cingul-Mid-Post ,-2.4096082230335485,1.166457973597625
...
...
S_postcentral ,1.3277159068067768,-1.4042773812503526
S_precentral-inf-part ,-1.9467169777576718,1.7216636236995733
S_precentral-sup-part ,0.764673539853991,2.1081570332369504
S_suborbital ,0.522368665639954,-2.3593237820349007
S_subparietal ,-0.14697262729901928,-2.2116605141889094
S_temporal_inf ,-1.8442944920810271,-0.6895142771486307
S_temporal_sup ,-1.8645248463693804,2.740099589311164
S_temporal_transverse ,-2.4244451521560073,2.286596403222344and creates a FreeSurfer labelmap where <str_structureName> colors correspond to the z-score (normalized between 0 and 255).
Currently, only the aparc.a2009s FreeSurfer segmentation is fully supported, however future parcellation support is planned.
Negative z-scores and positive z-scores are treated in the same manner but have sign-specific color specifications. Positive and negative z-Scores can be assigned some combination of the chars RGB to indicate which color dimension will reflect the z-Score. For example, a
--posColor R --negColor RGwill assign positive z-scores shades of red and negative z-scores shades of yellow (Red + Green = Yellow).
Synopsis
python z2labelmap.py \
[-v <level>] [--verbosity <level>] \
[--random] [--seed <seed>] \
[-p <f_posRange>] [--posRange <f_posRange>] \
[-n <f_negRange>] [--negRange <f_negRange>] \
[-P <'RGB'>] [--posColor <'RGB'>] \
[-N <'RGB'>] [--negColor <'RGB'>] \
[--imageSet <imageSetDirectory>] \
[-s <f_scaleRange>] [--scaleRange <f_scaleRange>] \
[-l <f_lowerFilter>] [--lowerFilter <f_lowerFilter>] \
[-u <f_upperFilter>] [--upperFilter <f_upperFilter>] \
[-z <zFile>] [--zFile <zFile>] \
[--version] \
[--man] \
[--meta] \
<inputDir> \
<outputDir>Run
This plugin can be run in two modes: natively as a python package or as a containerized docker image.
Using PyPI
To run from PyPI, simply do a
pip install z2labelmapand run with
z2labelmap.py --man /tmp /tmpto get inline help.
Using docker run
To run using docker, be sure to assign an “input” directory to /incoming and an output directory to /outgoing. Make sure that the $(pwd)/out directory is world writable!
Now, prefix all calls with
docker run --rm -v $(pwd)/in:/incoming -v $(pwd)/out:/outgoing \
fnndsc/pl-z2labelmap z2labelmap.py \Thus, getting inline help is:
docker run --rm -v $(pwd)/in:/incoming -v $(pwd)/out:/outgoing \
fnndsc/pl-z2labelmap z2labelmap.py \
--man \
/incoming /outgoingExamples
Create a sample/random z-score file and analyze
In the absense of an actual z-score file, the script can create one. This can then be used in subsequent analysis:
mkdir in out
docker run --rm -v $(pwd)/in:/incoming -v $(pwd)/out:/outgoing \
fnndsc/pl-z2labelmap z2labelmap.py \
--random --seed 1 \
--posRange 3.0 --negRange -3.0 \
/incoming /outgoingor without docker
mkdir in out
z2labelmap.py \
--random --seed 1 \
--posRange 3.0 --negRange -3.0 \
/in /outIn this example, z-scores range between 0.0 and (+/-) 3.0.
Generate labelmap and also copy pre-calculated image set to output
Analyze a file already located at in/zfile.csv and copy pre-calculated image data
docker run --rm -v $(pwd)/in:/incoming -v $(pwd)/out:/outgoing \
fnndsc/pl-z2labelmap z2labelmap.py \
--negColor B --posColor R \
--imageSet ../data/set1 \
/incoming /outgoingThis assumes a file called ‘zfile.csv’ in the <inputDirectory> that ranges in z-score between 0.0 and 3.0, and uses the –scaleRange to reduce the apparent brightness of the map by 50 percent. Furthermore, the lower 80 percent of z-scores are removed (this has the effect of only showing the brightest 20 percent of zscores).
Control relative brightness and lower filter low z-scores from final labelmap
To analyze a file already located at in/zfile.csv, apply a scaleRange and also filter out the lower 80% of z-scores:
docker run --rm -v $(pwd)/in:/incoming -v $(pwd)/out:/outgoing \
fnndsc/pl-z2labelmap z2labelmap.py \
--scaleRange 2.0 --lowerFilter 0.8 \
--negColor B --posColor R \
/incoming /outgoingThis assumes a file called ‘zfile.csv’ in the <inputDirectory> that ranges in z-score between 0.0 and 3.0, and uses the –scaleRange to reduce the apparent brightness of the map by 50 percent. Furthermore, the lower 80 percent of z-scores are removed (this has the effect of only showing the brightest 20 percent of zscores).
Using the above referenced z-score file, this results in:
0 Unknown 0 0 0 0
11101 lh-G_and_S_frontomargin 0 0 0 0
11102 lh-G_and_S_occipital_inf 0 0 0 0
11103 lh-G_and_S_paracentral 0 0 0 0
11104 lh-G_and_S_subcentral 103 0 0 0
11105 lh-G_and_S_transv_frontopol 0 0 0 0
11106 lh-G_and_S_cingul-Ant 0 0 110 0
11107 lh-G_and_S_cingul-Mid-Ant 0 0 0 0
11108 lh-G_and_S_cingul-Mid-Post 0 0 111 0
...
...
12167 rh-S_postcentral 0 0 0 0
12168 rh-S_precentral-inf-part 0 0 0 0
12169 rh-S_precentral-sup-part 0 0 0 0
12170 rh-S_suborbital 0 0 110 0
12171 rh-S_subparietal 0 0 103 0
12172 rh-S_temporal_inf 0 0 0 0
12173 rh-S_temporal_sup 119 0 0 0
12174 rh-S_temporal_transverse 0 0 0 0Command line arguments
<inputDir>
Required argument.
Input directory for plugin.
<outputDir>
Required argument.
Output directory for plugin.
[-v <level>] [--verbosity <level>]
Verbosity level for app. Not used currently.
[--random] [--seed <seed>]
If specified, generate a z-score file based on <posRange> and <negRange>. In addition, if a further optional <seed> is passed, then initialize the random generator with that seed, otherwise system time is used.
[-p <f_posRange>] [--posRange <f_posRange>]
Positive range for random max deviation generation.
[-n <f_negRange>] [--negRange <f_negRange>]
Negative range for random max deviation generation.
[-P <'RGB'>] [--posColor <'RGB'>]
Some combination of 'R', 'G', B' for positive heat.
[-N <'RGB'> [--negColor <'RGB'>]
Some combination of 'R', 'G', B' for negative heat.
[--imageSet <imageSetDirectory>]
If specified, will copy the (container) prepopulated image set in <imageSetDirectory> to the output directory.
[-s <f_scaleRange>] [--scaleRange <f_scaleRange>]
Scale range for normalization. This has the effect of controlling the
brightness of the map. For example, if this 1.5 the effect
is increase the apparent range by 50% which darkens all colors values.
[-l <f_lowerFilter>] [--lowerFilter <f_lowerFilter>]
Filter all z-scores below (normalized) <lowerFilter> to 0.0.
[-u <f_upperFilter>] [--upperFilter <f_upperFilter>]
Filter all z-scores above (normalized) <upperFilter> to 0.0.
[-z <zFile>] [--zFile <zFile>]
z-score file to read (relative to input directory). Defaults to 'zfile.csv'.
[--version]
If specified, print version number.
[--man]
If specified, print (this) man page.
[--meta]
If specified, print plugin meta data.Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
File details
Details for the file z2labelmap-2.2.0.tar.gz.
File metadata
- Download URL: z2labelmap-2.2.0.tar.gz
- Upload date:
- Size: 13.9 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.1.1 pkginfo/1.5.0.1 requests/2.23.0 setuptools/46.0.0 requests-toolbelt/0.9.1 tqdm/4.43.0 CPython/3.8.2
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
bea204f62b904ce0747e13468b7c46b9f6797f6867c59fc77518a0cd83aa47f6
|
|
| MD5 |
e5799b3f5dea17eb3f685cf022984cf4
|
|
| BLAKE2b-256 |
05bbf0b110d76de1b186f945716c16d0a05e90f7c89470b81194ef6bd3e2226c
|







