jiffyCodec: a fast, lossless SIMD compression codec for LiDAR streams

Project description
jiffyCodec
jiffyCodec: a fast, lossless SIMD compression codec for LiDAR streams
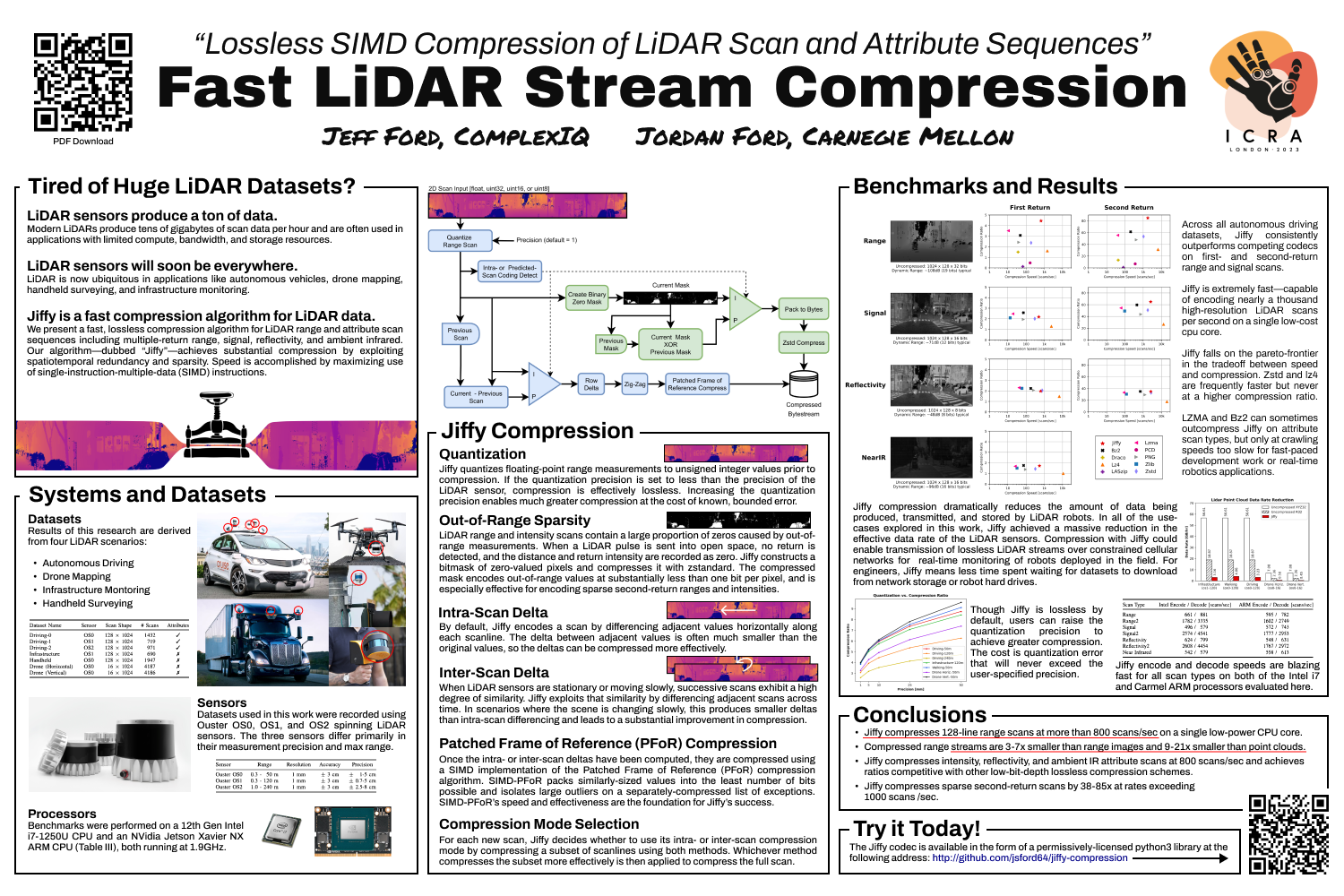
Read the peer-reviewed publication accepted for presentation at IEEE ICRA 2023 in London: 'Lossless SIMD Compression of LiDAR Range and Attribute Scan Sequences' here: https://arxiv.org/pdf/2209.08196.pdf
Dependencies
jiffyCodec was written and tested using Python 3.10.
Python Module Dependencies
Numpy
Zstandard
PyFastPfor:
ARM64/MacOS: git@github.com:jsford64/PyFastPFor-OSX-ARM64.git
Other: git@github.com:searchivarius/PyFastPFor.git
Installation
MacOS or Arm64
Pyfastpfor will not compile and install without C++ source code modifications on these platforms. We have made appropriate modifications in a fork of pyfastpfor. To install this version of pyfastpfor on MacOS or Arm64 prior to installing jiffyCodec:
git clone git@github.com:jsford64/PyFastPFor-OSX-ARM64.git
cd PyFastPFor-OSX-ARM64/python_bindings
pip install .
Then continue with installing jiffyCodec as shown in the following section.
Intel-based Windows & Linux Platforms
pip install jiffyCodec
Definitions
Scan
A numpy array containing one type of LiDAR data (a scan type: range, range2, intensity, etc.) with shape equal to the
shape passed to Scan() upon initialization.
<dtype> can be any size float or uint as appropriate for the scan type.
I Scan
An intra-coded scan. The compressed frame does not depend on any other frames in order to be decoded.
P Scan
Am inter-coded scan. The compressed frame depends on the decoded previous frame in order to be decoded.
Frame
list(range scan, range2 scan, intensity scan, ... )
Group
A logical grouping of compressed frames, where all scans within thee first frame of the group are compressed
as intra-coded (I) scans.
A group can be of size 1, which forces all scans to be encoded as I scans.
Examples
examples/encode_to_file.py: Encode some real LiDAR data from Ouster OS0-128 LiDAR to a file.
examples/decode_from_file.py: Decode a .jiffy file and display each frame of scans.
test.py: Encode and decode using a bytes string (b'') instead of a file.
Jiffy Constants
VERSION_MAJOR = 0
VERSION_MINOR = 3
VERSION = np.uint16(VERSION_MAJOR * 256 + VERSION_MINOR)
MAGIC = b'JFFY' 'Magic Number' for Jiffy encoded data/files.
ADAPTIVE = 0 Encode scan as I or P according to adaptive scan algorithm.
ISCAN = 1 Encode scan as I only.
Jiffy Stream Codec Class
Stream( scansPerFrame:np.uint8 = 1, framesPerGroup:int = 10, byteStream:ByteStream = b'',
precision:np.uint8 = 1, header:bool = True )
Compresses/decompresses a LiDAR stream, a sequence of LiDAR scans of multiple scan types.
A user should typically use either StreamReader() or StreamWriter(), rather than Stream(),
to avoid ambiguities regarding file handling.
Stream() Constructor Arguments
scansPerFrame:
The number of scans, each with a unique scan type (range, intensity,
etc.), returned by the LiDAR in one sweep. The collection of scans returned
in one sweep is called a frame.
Ignored on decode, since the number of scans per frame is encoded in the stream.
Must be > 0. Default is 1.
framesPerGroup:
A group of frames is a logical grouping of frames that are encoded
together, with the first frame in each group forced to be encoded as an
intra-coded frame (all scans in the first frame of every group are
I scans). Default is 10.
Ignored on decode, since the number of frames per group is encoded in the stream.
If framesPerGroup == 0, no groups are encoded. All frames will be coded as
temporal (I) or spatial (P) scans if mode=ADAPTIVE, or as intra-coded scans
if mode=ISCAN.
If framesPerGroup > 0, a group is encoded. All scans in the first frame
of each group will be intra-coded, so if framesPerGroup == 1, all scans will
be intra-coded.
All other frames in the group will be coded as temporal (I) or spatial (P) scans
if mode=ADAPTIVE, or as intra-coded scans if mode=ISCAN.
framesPerGroup must be a positive integer.
Groups of frames are used to improve random access and editing, and may
potentially aid in error recovery when decoding in future versions.
byteStream:
A Jiffy ByteStream object containing a compressed stream for decode, or
an empty ByteStream object to hold the encoded stream.
precision:
A scalar precision value to apply to all scan types, or a list of
precision values, one for each scan type. Precision is used to quantize
the scan values to the nearest integer multiple of precision.
On encode, scans will be rounded and truncated (quantized) to
the nearest integer by default (precision=1). Increasing
'precision'will make the quantization coarser, rounding and
truncating to the nearest integer multiple of 'precision',
producing a corresponding increase in compression ratio.
Valid precision values are positive, non-zero integers.
Range scans are expected to be pre-scaled to integer units of
millimeters such that a value of 1 == 1mm.
On decode, precision is ignored, since the precision values are encoded
in the stream.
header:
If True, a header will be written to the byteStream on the first call to
encode, and extracted from the byteStream on the first call to decode.
If header is False, the header will not be written on encode, and the user
is required to read the header (if it is present) before calling decode.
The header contains information about the stream, including the number of
scans per frame, the number of frames per group, and the precision values
used to encode the stream. Default is True.
Stream Attributes
byteStream:
The byteStream object used to encode/decode the stream.
framePrecisions:
A list of np.uint8 precision values used to encode/decode the stream, one for each
scan type.
scansPerFrame:
The number of scans per frame used to encode/decode the stream.
framesPerGroup:
The number of frames per group used to encode/decode the stream.
frameModes:
The actual scan modes used to encode/decode the frame. frameModes is a list of
scan modes, one for each scan in the frame. frameModes is only valid
after the first call to encode or decode, and updates on each subsequent call.
frameBytes:
The number of bytes used to encode/decode the frame. frameBytes is a list of
number of bytes, one for each scan in the frame. frameBytes is only valid
after the first call to encode, and it updates on each subsequent call to encode.
Ignored on decode.
frameCount:
The number of frames encoded/decoded. frameCount is only valid after the first
call to encode or decode, and it updates on each subsequent call to encode or decode.
if framesPerGroup > 0, frameCount is the number of scans encoded/decoded in the current group.
Stream Methods
writeHeader():
Write the Jiffy header to the byteStream.
readHeader():
Read the Jiffy header from the byteStream and return a dict with the header contents.
stats():
Return a dictionary of header contents.
encode(frame):
frame: A frame is a list of 2D numpy arrays (scans) produced from one sweep of the lidar,
with one array for each scan type (range, intensity, etc.) in the frame.
The number of scans in a frame must match the number of scan types in the encoded stream,
and remain constant for the entire stream.
If self.scansPerFrame == 0, frame can be a list of scans or
a single scan (2D numpy array, not a list).
The dtype of each scan can be float, int, or uint of any number of bytes, but
input values are expected to all be positive.
The shape of each scan must match the shape of the first scan encoded in the stream.
decode():
Decode a frame (list of scans) from the byteStream.
This is a generator function that yields one frame of scans at a time.
close():
Close the byteStream.
Do not call this function if you intend to continue using the byteStream.
Use rewind() instead.
rewind():
Rewind the byteStream to the beginning of the stream.
Use this when you want to decode an encoded stream you just generated.
Stream state is reset to:
header = True
frameCount = 0
Encoded Stream Format
All multi-byte fields are encoded as little endian.
Stream:
-------
if header == True:
Header Optional header, only if header == True
if framesPerGroup == 0:
[ iFrame ] + [ aFrame ] * n no groups, first frame is an I scan,
all others are adaptive, n = number of frames encoded in stream - 1
elif framesPerGroup == 1:
[ iFrame ] * n all frames are I scans, n = number of frames encoded in stream
else:
[ Group ] * m groups of frames, first frame in group is an I scan,
all others in the group are adaptive, m = number of groups encoded
Header (optional):
------------------
Field Name Type, Size (bytes) Description
-------------------------------------------------------------------------------------------
"JFFY" ASCII, 4 File 'magic number' identifier (jiffy.JIFFY)
version uint8, 1 Version of the Jiffy file format (jiffy.VERSION)
shape uint32, 8 shape of scans, (rows, cols)
scansPerFrame uint8, 1 Number of scans in a frame, min=1
framesPerGroup uint32, 4 Number of frames in a group,
0: no groups, first frame is an I scan,
all others are adaptive
1: all frames are I scans
2 or more: first frame in group is an I scan,
all others in the group are adaptive
framePrecisions uint8, scansPerFrame list of precision values, one for each scan type
Jiffy Stream Reader Class
StreamReader( byteStream:ByteStream, *args, **kwargs )
Jiffy StreamReader subclass of Stream(). Decompresses a LiDAR stream,
a sequence of LiDAR scans of multiple scan types.
StreamReader() constructor arguments:
byteStream:
A previously encoded ByteStream object containing a compressed stream,
a byte string (b''), a file name, or a file opened in mode 'rb+'.
On decode, Stream will extract encoded data from byteStream, producing
decoded frames.
*args:
Remaining arguments are passed to the Stream constructor.
**kwargs:
Remaining keyword arguments are passed to the Stream constructor.
Stream Writer Class
StreamWriter( byteStream:ByteStream, *args, **kwargs )
Jiffy StreamWriter subclass of Stream(). Compresses a LiDAR stream,
a sequence of LiDAR scans of multiple scan types.
StreamWriter() constructor arguments:
byteStream:
A byte string (b''), a file name, or a file opened in mode 'wb+'.
StreamWriter will append encoded data to any data already in byteStream,
except in the case where byteStream is a filename to open. If byteStream is a
filename, it will be opened in wb+ mode, and any existing data will be lost.
If an open file is used, it must be opened in wb+ mode.
byteStream defaults to using an empty bytes object (b'').
*args:
Remaining arguments are passed to the Stream constructor.
**kwargs:
Remaining keyword arguments are passed to the Stream constructor.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file jiffyCodec-0.1.0.tar.gz.
File metadata
- Download URL: jiffyCodec-0.1.0.tar.gz
- Upload date:
- Size: 22.8 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.2 CPython/3.10.5
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
3007a9ad5e348832864ddd1b139ef46c428ad0091d15938fdb1d0704dae9e103
|
|
| MD5 |
42bec55cd2c373faed7eaf8f9434a56c
|
|
| BLAKE2b-256 |
40e5acfb4de33283e8cc80d42a02a7d83190e487096d3484f51ec61f6507a0f9
|
File details
Details for the file jiffyCodec-0.1.0-py3-none-any.whl.
File metadata
- Download URL: jiffyCodec-0.1.0-py3-none-any.whl
- Upload date:
- Size: 21.6 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.2 CPython/3.10.5
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
a53e549202c2245db26944477abeba75c237567c1311df55842058a6e91f84ea
|
|
| MD5 |
0b37dac0947e9af3475e89eeb45fde05
|
|
| BLAKE2b-256 |
28195047c353ed7885cfde5f36e24817a76c6eea782303c1e9a0d49017412f04
|







