A Python package to access, download, view, and manipulate Cassini RADAR images


Project description
PYDAR









A Python package to access, download, view, and manipulate Cassini RADAR images in one place
- Find relevant flyby observation numbers/IDs for a feature, range of latitude/longitudes (or specific latitude/longitude), or a time range (or specific time)
- ids_from_feature_name()
- ids_from_latlon()
- ids_from_latlon_range()
- features_from_latlon()
- features_from_latlon_range()
- ids_from_time()
- ids_from_time_range()
- Use flyby observation numbers/IDs to retrieve flyby observation data (.FMT, .TAB, .LBL, .IMG) from SBDR and BIDR data files by default
- id_to_observation()
- observation_to_id()
- extract_flyby_images()
- Access specific observation data from AAREADME and .LBL readme information
- aareadme_options()
- read_aareadme()
- lbl_options()
- read_lbl_readme()
- Display PDS image retrieved for flyby observation
- display_all_images()
[!Note] This is Beta quality software that is being actively developed, use at your own risk. This project is not supported or endorsed by either JPL or NASA. The code is provided “as is”, use at your own risk.
Install
PyPi pip install at pypi.org/project/pydar/
pip install pydar
Quickstart: PYDAR
Cassini-Huygens was an orbiter around Saturn and its moons, originally launched in 1997. Cassini ran successfully for years before it was purposefully burned up in Saturn's upper atmosphere to avoid potential contamination of Saturn's moons . As the orbiter passed over Titan in dozens of flybys gigabits of data were recorded and sent back
All Cassini data for Titan is organized and retrieved based on flyby observation numbers or ID numbers. Pydar makes it easy to find and view relevant flybys based on a time range, latitude/longitude position, or a feature name
import pydar
feature_name_example = "ontario lacus"
flyby_ids = pydar.ids_from_feature_name(feature_name=feature_name_example)
Returns a dictionary of flyby IDs (and their relevant segments) that Ontario Lacus could be found from: {'T7': ['S01'], 'T36': ['S03'], 'T39': ['S06', 'S05', 'S01', 'S04'], 'T48': ['S04'], 'T49': ['S01'], 'T50': ['S02'], 'T55': ['S01', 'S03'], 'T56': ['S01'], 'T57': ['S01', 'S02'], 'T58': ['S01'], 'T59': ['S01'], 'T65': ['S04', 'S01', 'S05', 'S02', 'S03'], 'T71': ['S01'], 'T95': ['S03'], 'T98': ['S01', 'S04']}
The relevant data files can be downloaded for any combination of these flyby IDs and segment numbers. For example, flyby ID 'T65' and segment 'S01' at resolution 'D' for 8 pixels/degree
# Extract Flyby Data Files to pydar_results/ directory
pydar.extract_flyby_images(flyby_id='T65',
resolution='D',
segment_num="S01")
[!Important] extract_flyby_images() only needs to be run once for each flyby to retrieve new data but will take some time to download
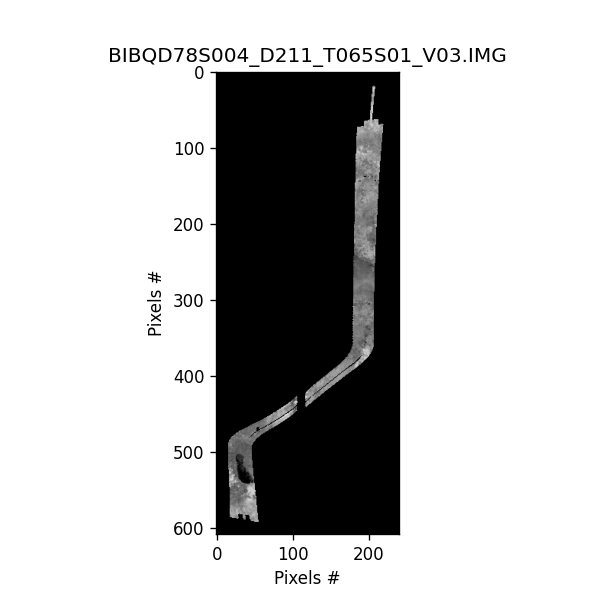
# Display all Images in pydar_results/ directory
pydar.display_all_images(image_directory="pydar_results/CORADR_0211_V03_S01")
Overview and Background
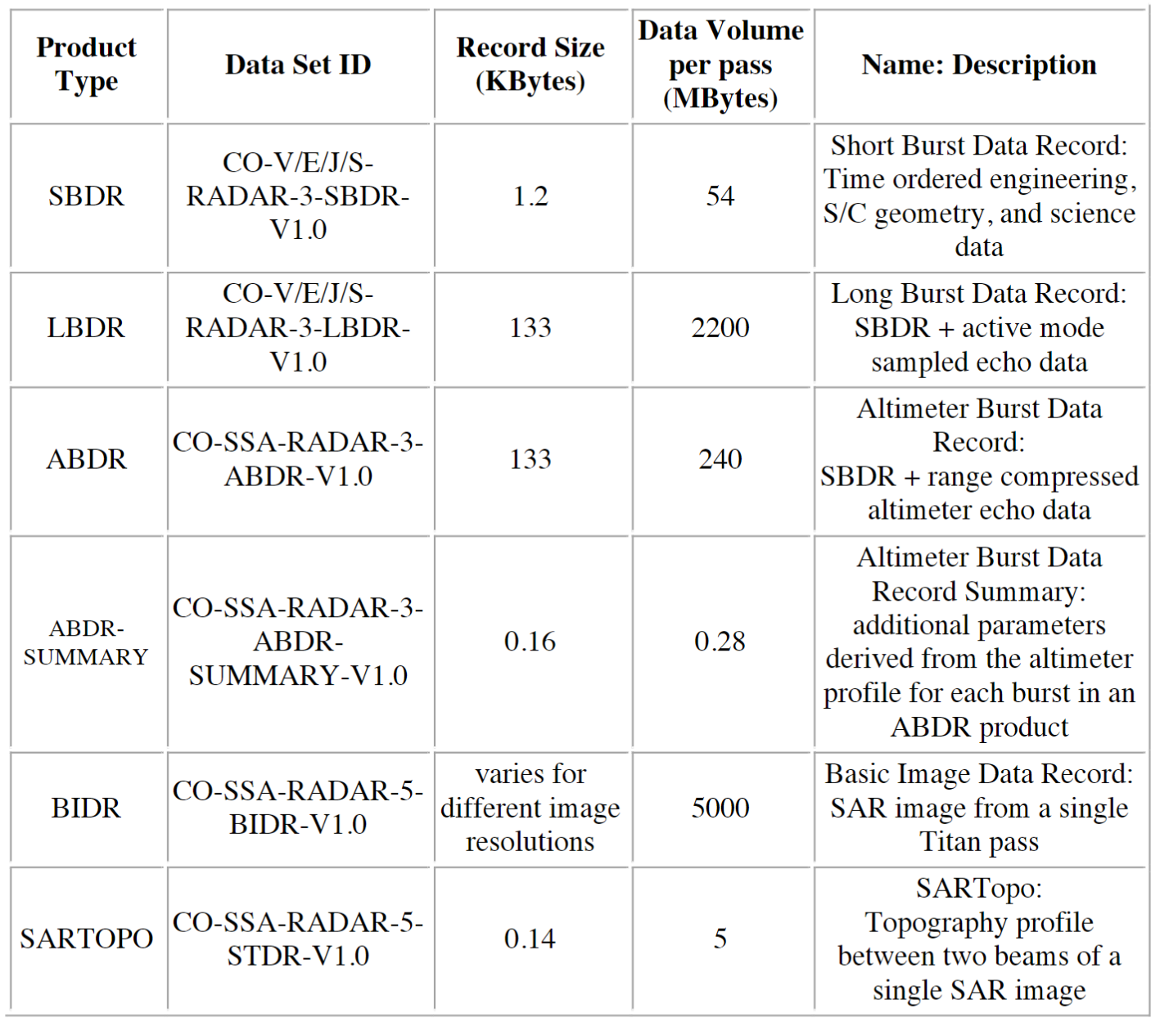
For information on Cassini instrument specifics and acronyms refer to the Cassini Radar User Guide
The Cassini Radar data can be found at the PDS Imaging Node. The directory is organized by PDS standards. The file format are defined in the Small Body Node. The radar echo is stored originally as floating points in LBDR files. The SAR processors turn the LBDR files into BIDR image. The BIDR data is organized as follows:
Cassini RADAR Information (CORADR_xxxx_Vxx) where xxxx is the radar data take number and Vxx is the data version number
|_ AAREADME.txt
Information about observation xxxx (xxxx > 0035 for Titan flybys)
|_CALIB/
|_CATALOG/
BIDRDS.CAT: Information about the BIDR dataset
|_DATA/
| |_BIDR/
| |_ BIbcdeefggg_Dhhh_Tiii_Vnn.LBL: header information for observation < -------- MAIN DATA OF INTEREST'S LABEL
| |_ BIbcdeefggg_Dhhh_Tiii_Vnn.ZIP: IMG file compressed in zip file < -------- MAIN DATA OF INTEREST
| | | b = Kind and bit-type of data
| | | F = Primary dataset (incidence-
| | | angle-corrected sigma0) in
| | | 32-bit floating-point format
| | | (linear scale, not dB)
| | | B = Primary dataset in unsigned
| | | byte format (dB, normalized
| | | to [0, 255])
| | | U = Sigma0 without incidence angle
| | | correction in 32-bit floating-
| | | point format (linear scale,
| | | not dB)
| | | E = Incidence angle map, 32-bit
| | | floating-point values in degrees
| | | T = Latitude map, 32-bit floating-
| | | point values in degrees
| | | N = Longitude map, 32-bit floating-
| | | point values in degrees
| | | M = Beam mask map, 8-bit unsigned
| | | byte values
| | | L = Number of looks map, 32-bit
| | | integer values
| | | D = standard deviations of Synthetic Aperture Radar
| | | (SAR) normalized backscatter cross-section noise
| | | subtracted values w/o incidence angle correction.
| | | The values are physical scale (not in dB)
| | | S = Synthetic Aperture Radar (SAR) normalized backscatter cross-section values
| | | physical scale (not in dB) and have not been corrected for incidence-angle effects.
| | | Biases due to thermal and quantization noise have been removed.
| | | X = Noise equivalent sigma-0 values associated with Synthetic Aperture Radar (SAR)
| | | normalized backscatter cross-section noise subtracted values w/o incidence angle
| | | correction. The values are physical scale (not in dB)."
| | | c = Map projection
| | | Q = Oblique cylindrical
| | | d = Map resolution
| | | B = 2 pixels/degree
| | | D = 8 pixels/degree
| | | F = 32 pixels/degree
| | | G = 64 pixels/degree
| | | H = 128 pixels/degree
| | | I = 256 pixels/degree
| | | ee = Absolute value of latitude at
| | | center of file, rounded to
| | | nearest degree
| | | f = Hemisphere of center of file
| | | N = Northern
| | | S = Southern
| | | ggg = West longitude at center of
| | | file, rounded to nearest degree
| | | hhh = 3-digit data take ID
| | | (observation counter) from which
| | | data are included, left-padded
| | | with zeroes as needed
| | | iii = 3-digit index of Titan flyby
| | | from which data are included,
| | | left-padded with zeroes as
| | | needed. (Note: the index
| | | for the "Ta" flyby is "00A")
|_______ |________ | ____________________ nn = 2-digit version number
|
|_DOCUMENT/
|_ERRATA.txt
|_EXTRAS/
|_BIbcdeefggg_Dhhh_Tiii_Vnn.JPG: jpg of IMG files in DATA
|_INDEX/
|_SOFTWARE/
|_VOLDESC.CAT <--- VERSION INFORMATION LISTED HERE ('VOLUME_VERSION_ID' = "Version 1", "Version 2", "Version 3") and in filename
.IMG files can be viewed using the planetary images library or via pydar.display_all_images()
Download Time
Download time for data files vary when using pydar.extract_flyby_images() and depends on the number and size of files of interest. On average, most single feature downloads take between 1-5 minutes to download, but can be longer for higher resolution files.
Cross-Reference Table for Observations and Flybys
The Titan flyby IDs (e.g. 'T65') are not used in the naming convention for the CORADR filenames. Instead, all files are referred to by their observation number (e.g. '0211'). The Titan flyby information is contained in the BIDR filenames and in the VOLDESC.CAT under 'Description' and can be found using the following cross-reference table: cassini_flyby.csv
To convert between a Titan Flyby ID and an observation number use either pydar.id_to_observation(flyby_id) or pydar.observation_to_id(flyby_observation_num)
Observation Information as Filename
The data filename contains a lot of information about the observation
(EXAMPLE) Filename: "BIBQD05S184_D065_T008S03_V03"
- BI = BIDR data
- B = data in dB normalized
- Q = oblique cylindrical
- D = 8 pixels/degree
- 05 = absolute value of latitude at center rounded to nearest degree
- S = hemisphere of center of file (Southern)
- 184 = West longitude at center of file rounded to nearest degree
- D065 = 2-digit data take ID aka observation counter with left-padded zeros
- T008 = 3-digit Titan flyby with left-padding
- S03 = 2-digit segment number (00-99)
- V03 = 2-digit version number (01-99)
Image file from BIBQD05S184_D065_T008S03_V03.JPG:

Volume Version of Data
Some passes have multiple versions of the data, up to 3 different versions currently.
- Version 1 (V01) was the first archived version of the data and assumed Titan had zero obliquity, which resulted in misregistration between passes
- Version 2 (V02) used a Titan spin model that reduced misregistration error
- Version 3 (V03) used a long-term, accurate spin model for Titan along with other improvements
Only some Titan passes produced all of the version numbers.
-
TA-T25 : V01, V02, V03
-
$\gt$ T28: V02, V03
-
T108-T126: labeled only once as V02 but is actually V03
The version number is listed in the filename and in VOLDESC.CAT under the 'VOLUME_VERSION_ID'
Example:
Version 1 is named BIFQI48N071_D035_T00A_V01.IMG
Version 2 is named BIFQI49N071_D035_T00AS01_V02.IMG
Version 3 is named BIFQI49N071_D035_T00AS01_V03.IMG
[!Important] Version 3 is currently the latest and preferred version and will be the version included when downloaded
Segment Number of Data
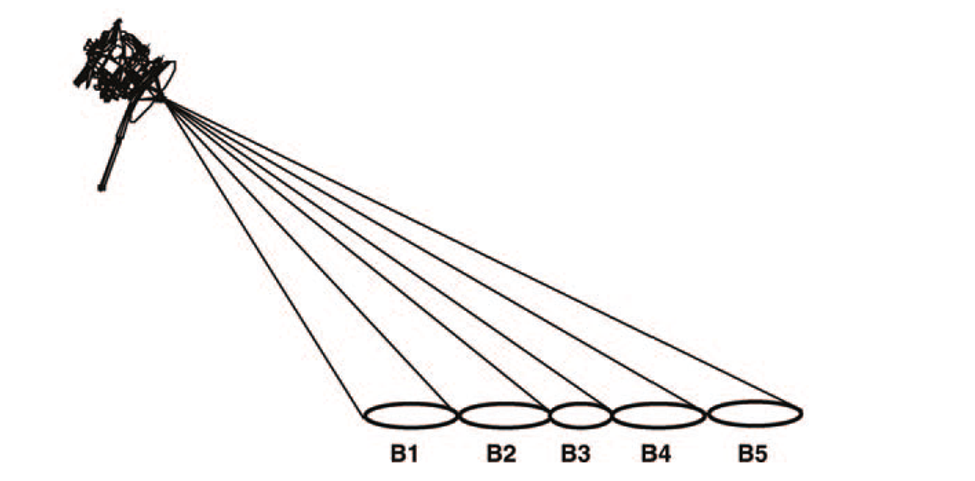
A single flyby can produce multiple image segments (Sxx). S01 is the primary imaging segment with other segments referring to periods in the flyby when the instrument went to/from altimetry/SAR/HiSAR or weird pointing profiles.
Backend Data Files
Dynamically Updated Backend Files
Pydar includes multiple scripts to web scrape from relevant URLs to generate some of the backend data files
Changes in the relevant URLs are checked once a month via Github Actions to keep csv files up to date and any changes found will be bundled into the subsequent release
coradr_jpl_options.csv
Contains all the CORADR IDs and available data types from planetarydata.jpl.nasa.gov/img/data/cassini/cassini_orbiter/
Headers: ["CORADR ID", "Is a Titan Flyby", "Contains ABDR", "Contains ASUM", "Contains BIDR", "Contains LBDR", "Contains SBDR", "Contains STDR"]
View data file: coradr_jpl_options.csv
swath_coverage_by_time_position.csv
Contains all the information for .LBL files within all CORADR ID pages (for each segment and resolution file)
Collected from URLs matching: https://planetarydata.jpl.nasa.gov/img/data/cassini/cassini_orbiter/[CORADAR_ID]/DATA/BIDR/
Headers: ["CORADR ID", "FLYBY ID", "SEGMENT NUMBER", "FILENAME", "DATE TYPE SYMBOL", "DATE TYPE", "RESOLUTION (pixels/degrees)", "TARGET_NAME", "MAXIMUM_LATITUDE (Degrees)", "MINIMUM_LATITUDE (Degrees)", "EASTERNMOST_LONGITUDE (Degrees)", "WESTERNMOST_LONGITUDE (Degrees)", "START_TIME", "STOP_TIME"]
View data file: swath_coverage_by_time_position.csv
feature_name_details.csv
Contains all named features on Titan with their furthest latitude/longitude position and URL where information was collected from
Collected from the planetarynames.wr.usgs.gov
Headers: ["Feature Name", "Northmost Latitude", "Southmost Latitude", "Eastmost Longitude", "Westmost Longitude", "Center Latitude", "Center Longitude", "URL"]
View data file: feature_name_details.csv
Static Data Files
cassini_flyby.csv
Reference for converting between a Titan Flyby ID (e.g. "T7") and its Observation Number (e.g. "059") (and back)
Headers: ["Titan flyby id", "Radar Data Take Number", "Sequence number", "Orbit Number/ID"]
View data file: cassini_flyby.csv
sar_swath_details.csv
Currently unused, but will potentially be used in the future for incidence angle, polarization, azimuth, SAR range resolution, SAR azimuth resolution, and number of looks
Converted to a static csv file from the Cassini User Guide (pg. 136-139)
View data file: sar_swath_details.csv
BIDR and SBDR Files
[!Warning] "CORADR_0048", "CORADR_0186", "CORADR_0189", "CORADR_0209", "CORADR_0234" do not have associated BIDR values.
[!Caution] There are data gaps and problems from the original downlinking and satellite location
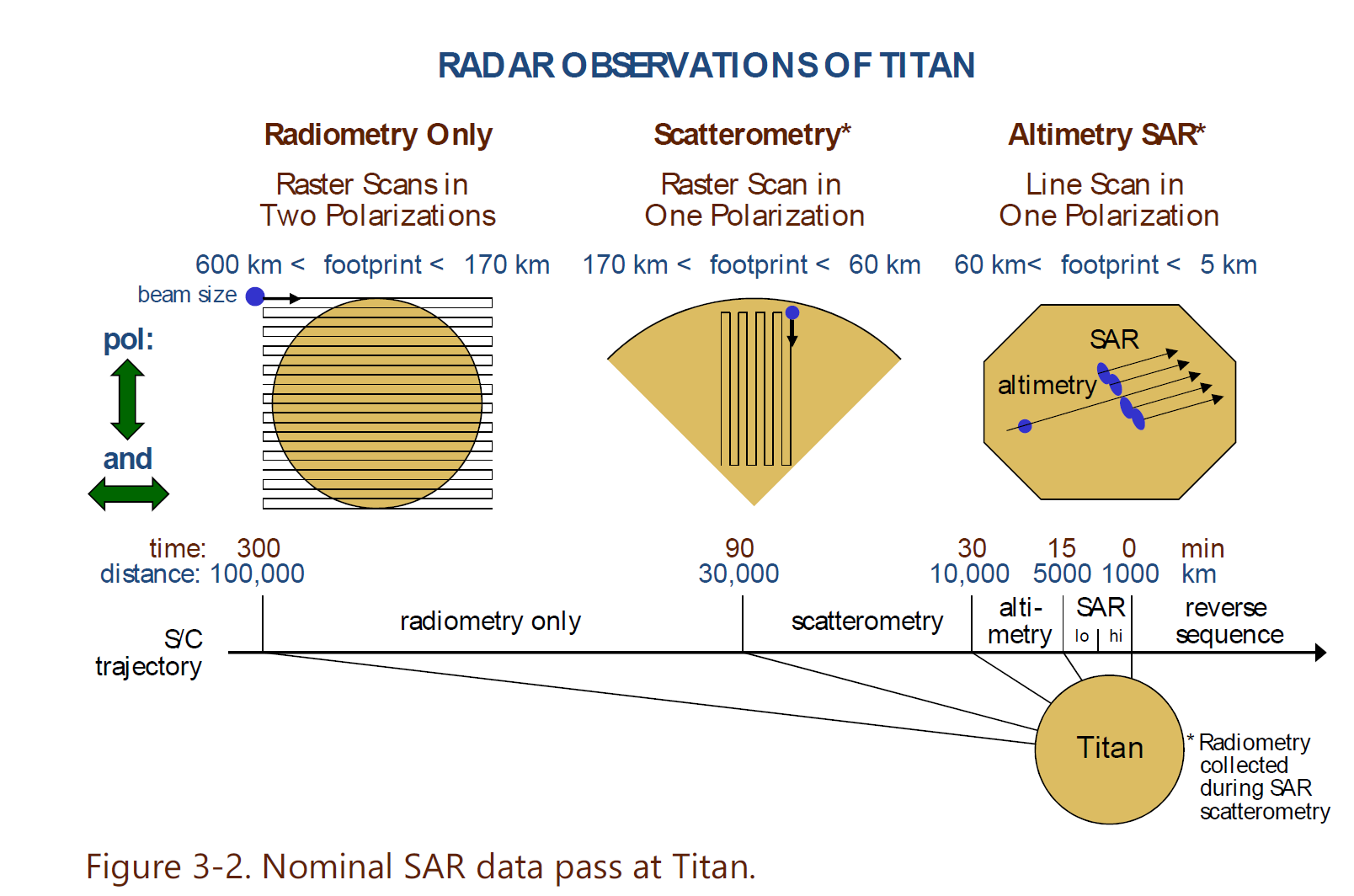
CORADR_0048 (T4) did not have SAR data, only scatterometry and radiometry because of telemetry reasons in the handbook
CORADR_0186 (T52) only have radiometry and compressed scatterometry
CORADR_0189 (T53) only has radiometry and compressed scatterometry because of what appears to be a downlink problem
CORADR_0209 (T63) only has scatterometry and radiometry
CORADR_0234 (T80) only has scatterometry and radiometry
Coming Soon: SBDR Files
Total width of the RADAR swath is created by combining the five individual sub-swaths, where the center beam is the highest gain
Retrieve Data from CASSINI Function Calls
To collect flyby information and images for the latitude/longitude range of a named feature on Titan
ids_from_feature_name()
Retrieve a list of flyby IDs with their associated segment numbers based on a feature name from Titan
ids_from_feature_name(feature_name=None)
- [REQUIRED] feature_name (string): Feature name on Titan, not case-sensitive
Feature names are retrieved from feature_name_details.csv (if the feature has both latitude/longitude coordinates)
List of Valid Feature Names (Click to view all)
['Aaru', 'Abaya Lacus', 'Adiri', 'Afekan', 'Akmena Lacus', 'Albano Lacus', 'Anbus Labyrinthus', 'Angmar Montes', 'Annecy Lacus', 'Antilia Faculae', 'Apanohuaya Flumen', 'Ara Fluctus', 'Arala Lacus', 'Arnar Sinus', 'Arrakis Planitia', 'Arwen Colles', 'Atacama Lacuna', 'Atitlán Lacus', 'Aura Undae', 'Avacha Sinus', 'Aztlan', 'Bacab Virgae', 'Baffin Sinus', 'Balaton Lacus', 'Bayta Fretum', 'Bazaruto Facula', 'Beag', 'Belet', 'Bermoothes Insula', 'Bilbo Colles', 'Bimini Insula', 'Bolsena Lacus', 'Boni Sinus', 'Boreas Undae', 'Bralgu Insulae', 'Brienz Lacus', 'Buada Lacus', 'Buyan Insula', 'Buzzell Planitia', 'Caladan Planitia', 'Cardiel Lacus', 'Cayuga Lacus', 'Celadon Flumina', 'Cerknica Lacuna', 'Chapala Lacus', 'Chilwa Lacus', 'Ching-tu', 'Chusuk Planitia', 'Coats Facula', 'Concordia Regio', 'Corrin Labyrinthus', 'Crete Facula', 'Crveno Lacus', 'Dem Lacus', 'Dilmun', 'Dilolo Lacus', 'Dingle Sinus', 'Dolmed Montes', 'Doom Mons', 'Dridzis Lacus', 'Ecaz Labyrinthus', 'Echoriath Montes', 'Eir Macula', 'Elba Facula', 'Elivagar Flumina', 'Elpis Macula', 'Enriquillo Lacus', 'Erebor Mons', 'Eurus Undae', 'Eyre Lacuna', 'Fagaloa Sinus', 'Faramir Colles', 'Feia Lacus', 'Fena Lacus', 'Fensal', 'Flensborg Sinus', 'Fogo Lacus', 'Forseti', 'Freeman Lacus', 'Fundy Sinus', 'Gabes Sinus', 'Gammu Labyrinthus', 'Gamont Labyrinthus', 'Gandalf Colles', 'Ganesa Macula', 'Gansireed Labyrinthus', 'Garotman Terra', 'Gatun Lacus', 'Genetaska Macula', 'Genova Sinus', 'Giedi Planitia', 'Gihon Flumen', 'Ginaz Labyrinthus', 'Gram Montes', 'Grasmere Lacus', 'Grumman Labyrinthus', 'Guabonito', 'Hagal Planitia', 'Hammar Lacus', 'Handir Colles', 'Hano', 'Hardin Fretum', 'Harmonthep Labyrinthus', 'Hawaiki Insulae', 'Hetpet Regio', 'Hlawga Lacus', 'Hobal Virga', 'Hotei Arcus', 'Hotei Regio', 'Hubur Flumen', 'Hufaidh Insulae', 'Huygens Landing Site', 'Ihi', 'Ihotry Lacus', 'Imogene Lacus', 'Ipyr Labyrinthus', 'Irensaga Montes', 'Jerid Lacuna', 'Jingpo Lacus', 'Junction Labyrinthus', 'Junín Lacus', 'Kaitain Labyrinthus', 'Kalseru Virga', 'Karakul Lacus', 'Karesos Flumen', 'Kayangan Lacus', 'Kerguelen Facula', 'Kivu Lacus', 'Koitere Lacus', 'Kokytos Flumina', 'Kraken Mare', 'Krocylea Insulae', 'Kronin Labyrinthus', 'Ksa', 'Kumbaru Sinus', 'Kutch Lacuna', 'Ladoga Lacus', 'Lagdo Lacus', 'Lampadas Labyrinthus', 'Lanao Lacus', 'Lankiveil Labyrinthus', 'Leilah Fluctus', 'Lernaeus Labyrinthus', 'Letas Lacus', 'Ligeia Mare', 'Lithui Montes', 'Logtak Lacus', 'Luin Montes', 'Lulworth Sinus', 'Mackay Lacus', 'Maizuru Sinus', 'Manza Sinus', 'Maracaibo Lacus', 'Mayda Insula', 'Melrhir Lacuna', 'Menrva', 'Merlock Montes', 'Meropis Insula', 'Mezzoramia', 'Mindanao Facula', 'Mindolluin Montes', 'Misty Montes', 'Mithrim Montes', 'Mohini Fluctus', 'Momoy', 'Montego Sinus', 'Moray Sinus', 'Moria Montes', 'Muritan Labyrinthus', 'Muzhwi Lacus', 'Mweru Lacus', 'Mystis', 'Müggel Lacus', 'Mývatn Lacus', 'Nakuru Lacuna', 'Naraj Labyrinthus', 'Nath', 'Neagh Lacus', 'Negra Lacus', 'Ngami Lacuna', 'Nicobar Faculae', 'Nicoya Sinus', 'Nimloth Colles', 'Niushe Labyrinthus', 'Notus Undae', 'Oahu Facula', 'Ochumare Regio', 'Ohrid Lacus', 'Okahu Sinus', 'Olomega Lacus', 'Omacatl Macula', 'Oneida Lacus', 'Onogoro Insula', 'Ontario Lacus', 'Orog Lacuna', 'Paititi Terra', 'Palma Labyrinthus', 'Patos Sinus', 'Paxsi', 'Penglai Insula', 'Perkunas Virgae', 'Phewa Lacus', 'Pielinen Lacus', 'Planctae Insulae', 'Polaznik Macula', 'Polelya Macula', 'Poritrin Planitia', 'Prespa Lacus', 'Puget Sinus', 'Punga Mare', 'Qinghai Lacus', 'Quilotoa Lacus', 'Quivira', 'Racetrack Lacuna', 'Rannoch Lacus', 'Rerir Montes', 'Richese Labyrinthus', 'Robino Lacus', 'Roca Lacus', 'Rohe Fluctus', 'Rombaken Sinus', 'Romo Planitia', 'Rossak Planitia', 'Royllo Insula', 'Rukwa Lacus', 'Rwegura Lacus', 'Saldanha Sinus', 'Salusa Labyrinthus', 'Sambation Flumina', 'Santorini Facula', 'Saraswati Flumen', 'Sarygamysh Lacus', 'Seldon Fretum', 'Selk', 'Senkyo', 'Sevan Lacus', 'Shangri-La', 'Shikoku Facula', 'Shiwanni Virgae', 'Shoji Lacus', 'Sikun Labyrinthus', 'Sinlap', 'Sionascaig Lacus', 'Skelton Sinus', 'Soi', 'Sotonera Lacus', 'Sotra Patera', 'Sparrow Lacus', 'Suwa Lacus', 'Synevyr Lacus', 'Taniquetil Montes', 'Tasmania Facula', 'Taupo Lacus', 'Tengiz Lacus', 'Texel Facula', 'Tibi Lacus', 'Tishtrya Virgae', 'Tlaloc Virgae', 'Tleilax Labyrinthus', 'Toba Lacus', 'Tollan Terra', 'Tortola Facula', 'Totak Lacus', 'Towada Lacus', 'Trevize Fretum', 'Trichonida Lacus', 'Trold Sinus', 'Tsegihi', 'Tsiipiya Terra', 'Tsomgo Lacus', 'Tui Regio', 'Tumaco Sinus', 'Tunu Sinus', 'Tupile Labyrinthus', 'Uanui Virgae', 'Urmia Lacus', 'Uvs Lacus', 'Uyuni Lacuna', 'Vaca Lacus', 'Van Lacus', 'Veles', 'Veliko Lacuna', 'Vid Flumina', 'Viedma Lacus', 'Vis Facula', 'Vänern Lacus', 'Waikare Lacus', 'Wakasa Sinus', 'Walvis Sinus', 'Weija Lacus', 'Winia Fluctus', 'Winnipeg Lacus', 'Woytchugga Lacuna', 'Xanadu', 'Xanthus Flumen', 'Xolotlán Lacus', 'Xuttah Planitia', 'Yalaing Terra', 'Yessey Lacus', 'Yojoa Lacus', 'Ypoa Lacus', 'Zaza Lacus', 'Zephyrus Undae', 'Zub Lacus']
import pydar
pydar.ids_from_feature_name(feature_name="Ontario Lacus")
Output = {'T7': ['S01'], 'T36': ['S03'], 'T39': ['S06', 'S05', 'S01', 'S04'], 'T48': ['S04'], 'T49': ['S01'], 'T50': ['S02'], 'T55': ['S01', 'S03'], 'T56': ['S01'], 'T57': ['S01', 'S02'], 'T58': ['S01'], 'T59': ['S01'], 'T65': ['S04', 'S01', 'S05', 'S02', 'S03'], 'T71': ['S01'], 'T95': ['S03'], 'T98': ['S01', 'S04']}
ids_from_latlon()
Retrieve a list of flyby IDs with their associated segments based on specific latitude and longitude
ids_from_latlon(latitude=None, longitude=None)
- [REQUIRED] latitude (float/int): Latitude (in degrees), range from -90° to 90°
- [REQUIRED] longitude (float/int): Longitude (in degrees), range from 0° to 360°
import pydar
pydar.ids_from_latlon(latitude=-80, longitude=170)
Output = {'T39': ['S06', 'S05', 'S01'], 'T49': ['S01'], 'T50': ['S02'], 'T55': ['S03'], 'T56': ['S01'], 'T57': ['S01'], 'T58': ['S01'], 'T59': ['S01'], 'T65': ['S01'], 'T95': ['S03'], 'T98': ['S01', 'S04']}
ids_from_latlon_range()
Retrieve a list of flyby IDs with their associated segments based on range of latitudes and longitudes
ids_from_latlon_range(min_latitude=None,
max_latitude=None,
min_longitude=None,
max_longitude=None)
- [REQUIRED] min_latitude (float/int): Latitude (in degrees) where min_latitude must be greater than or equal to the max_latitude, range from -90° to 90°
- [REQUIRED] max_latitude (float/int): Latitude (in degrees) where max_latitude must be less than or equal to the min_latitude, range from -90° to 90°
- [REQUIRED] min_longitude (float/int): Longitude (in degrees) where min_longitude must be less than or equal to the max_longitude, range from 0° to 360°
- [REQUIRED] max_longitude (float/int): Longitude (in degrees) where max_longitude be greater than or equal to the min_longitude, range from 0° to 360°
import pydar
pydar.ids_from_latlon_range(min_latitude=-82,
max_latitude=-72,
min_longitude=183,
max_longitude=185)
Output = {'T7': ['S01'], 'T36': ['S03'], 'T39': ['S06', 'S05', 'S01', 'S04'], 'T48': ['S04'], 'T49': ['S01'], 'T50': ['S02'], 'T55': ['S01', 'S03'], 'T56': ['S01'], 'T57': ['S01', 'S02'], 'T58': ['S01'], 'T59': ['S01'], 'T65': ['S04', 'S01', 'S05', 'S02', 'S03'], 'T71': ['S01'], 'T95': ['S03'], 'T98': ['S01', 'S04']}
features_from_latlon()
Return a list of features found at a specific latitude/longitude position
features_from_latlon(latitude=None, longitude=None)
- [REQUIRED] latitude (float/int): Latitude (in degrees), range from -90° to 90°
- [REQUIRED] longitude (float/int): Longitude (in degrees), range from 0° to 360°
import pydar
pydar.features_from_latlon(latitude=-72, longitude=183)
Output = ['Ontario Lacus', 'Rossak Planitia']
features_from_latlon_range()
Return a list of features found at a range of latitude/longitude positions
features_from_latlon_range(min_latitude=None,
max_latitude=None,
min_longitude=None,
max_longitude=None)
- [REQUIRED] min_latitude (float/int): Latitude (in degrees) where min_latitude must be less than or equal to the max_latitude, range from -90° to 90°
- [REQUIRED] max_latitude (float/int): Latitude (in degrees) where max_latitude must be greater than or equal to the min_latitude, range from -90° to 90°
- [REQUIRED] min_longitude (float/int): Longitude (in degrees) where min_longitude must be less than or equal to the max_longitude, range from 0° to 360°
- [REQUIRED] max_longitude (float/int): Longitude (in degrees) where max_longitude must be greater than or equal to the min_longitude, range from 0° to 360°
import pydar
pydar.features_from_latlon_range(min_latitude=-82,
max_latitude=-72,
min_longitude=183,
max_longitude=190)
Output = ['Crveno Lacus', 'Ontario Lacus', 'Romo Planitia', 'Rossak Planitia', 'Saraswati Flumen']
ids_from_time()
Retrieve a dictionary of flyby IDs and segment numbers based on a specific timestamp
ids_from_time(year=None,
doy=None,
hour=None,
minute=None,
second=None,
millisecond=None)
- [REQUIRED] year (int): Year for observation, range from 2004 to 2014
- [REQUIRED] doy (int): Day of the year, from 0 to 365 (where January 10 = 10) (Note: 'doy' not 'day' for days of the year)
- [OPTIONAL] hour (int): Hour, from 0 to 23 in UTC, defaults to 0 when undefined
- [OPTIONAL] minute (int): Minute, from 0 to 59, defaults to check the all minutes when undefined
- [OPTIONAL] second (int): Second, from 0 to 59, defaults to check the all seconds when undefined
- [OPTIONAL] millisecond (int): Millisecond, from 0 to 999, defaults to check all milliseconds when undefined
Where 2004 year, 300 doy, 15 hour, 30 minute, 7 second, 789 millisecond becomes 2004-300T15:30:07.789
import pydar
pydar.ids_from_time(year=2004,
doy=300,
hour=15,
minute=30,
second=7,
millisecond=789)
Output = {'Ta': ['S01']}
If hour, minute, second, or millisecond is left undefined, will search the entire range for all possible values and can find more possible ids
For a single day, some flybys have segments that are defined in one large range, but not within a smaller range
import pydar
pydar.ids_from_time(year=2005, doy=301)
Output for the entire day of 301 = {'T8': ['S02', 'S03', 'S01']}
import pydar
pydar.ids_from_time(year=2005, doy=301, hour=3)
Output for the day 301 but just for hour 3 = {'T8': ['S03', 'S01']} (does not include S02)
ids_from_time_range()
Retrieve a dictionary of flyby IDs and segment numbers based on a start and end datetime
ids_from_time_range(start_year=None,
start_doy=None,
start_hour=None,
start_minute=None,
start_second=None,
start_millisecond=None,
end_year=None,
end_doy=None,
end_hour=None,
end_minute=None,
end_second=None,
end_millisecond=None)
- [REQUIRED] start_year (int): Year for observation, range from 2004 to 2014, start_year must be less than/equal to end_year
- [REQUIRED] end_year (int): Year for observation, range from 2004 to 2014, end_year must be greater than/equal to start_year
- [REQUIRED] start_doy (int): Day of the year, from 0 to 365 (where January 10 = 10) (Note: 'doy' not 'day' for days of the year), start_doy must be less than/equal to end_doy
- [REQUIRED] end_doy (int): Day of the year, from 0 to 365 (where January 10 = 10) (Note: 'doy' not 'day' for days of the year), end_doy must be less than/equal to start_doy
- [OPTIONAL] start_hour (int): Hour, from 0 to 23 in UTC, defaults to check all hours when undefined, start_hour must be less than/equal to end_hour
- [OPTIONAL] end_hour (int): Hour, from 0 to 23 in UTC, defaults to check all hours when undefined, end_hour must be less than/equal to start_hour
- [OPTIONAL] start_minute (int): Minute, from 0 to 59, defaults to check all minutes when undefined, start_minute must be less than/equal to end_minute
- [OPTIONAL] end_minute (int): Minute, from 0 to 59, defaults to check all minutes when undefined, end_minute must be greater than/equal to start_minute
- [OPTIONAL] start_second (int): Second, from 0 to 59, defaults to check all seconds when undefined, start_second must be less than/equal to end_second
- [OPTIONAL] end_second (int): Second, from 0 to 59, defaults to check all seconds when undefined, end_second must be greater than/equal to start_second
- [OPTIONAL] start_millisecond (int): Milliscond, from 0 to 999, defaults to check all milliseconds when undefined, start_millisecond must be less than/equal to end_millisecond
- [OPTIONAL] end_millisecond (int): Milliscond, from 0 to 999, defaults to check all milliseconds when undefined, end_millisecond must be greater than/equal to start_millisecond
import pydar
pydar.ids_from_time_range(start_year=2004,
start_doy=299,
start_hour=2,
start_minute=15,
start_second=23,
start_millisecond=987,
end_year=2005,
end_doy=301,
end_hour=2,
end_minute=15,
end_second=23,
end_millisecond=987)
Output = {'Ta': ['S01'], 'T3': ['S01'], 'T7': ['S01']}
id_to_observation()
Converts a Titan Flyby ID (for example: 'T65') to an observation number with front padding ('T65' -> '0211')
id_to_observation(flyby_id)
- [REQUIRED] flyby_id (string): a valid flyby ID with prefix 'T'
import pydar
observation_number = id_to_observation(flyby_id='T65')
Output = 0211
Observation number based on the 'Radar Data Take Number' in the cassini_flyby.csv data file with front padding to ensure that all observation numbers are 4 digits long (0065 and 0211)
observation_to_id()
Converts a Titan Observation Number (for example: '211' or '0211') to an flyby id ('0211' -> 'T65')
observation_to_id(flyby_observation_num)
- [REQUIRED] flyby_observation_num (string): a valid observation number
import pydar
flyby_id = pydar.observation_to_id(flyby_observation_num='211')
Output = T65
Flyby ids are based on the 'Radar Data Take Number' in the cassini_flyby.csv data file with front padding of 'T'
Requires each Titan flyby ID to be a valid flyby ID in cassini_flyby.csv
extract_flyby_images()
Downloads flyby data SBDR for a selected flyby observation number or flyby id: .FMT and .TAB files (for example: SBDR.FMT and SBDR_15_D087_V03.TAB)
Downloads flyby data BIDR for a selected flyby observation number or flyby id: .LBL and .ZIP files (for example: BIBQH80N051_D087_T016S01_V03.LBL and BIBQH80N051_D087_T016S01_V03.ZIP)
extract_flyby_images(flyby_observation_num=None,
flyby_id=None,
segment_num=None,
additional_data_types_to_download=[],
resolution='I',
top_x_resolutions=None)
Either a flyby_id (for example: 'T65') or a flyby_observation_num (for example: '0035') is required.
[!Note] A
flyby_idwill be translated into aflyby_observation_numberto access on the backend and the results will be saved under the observation number. For example, 'T65' will become observation number '0211'
- [REQUIRED/OPTIONAL] flyby_observation_num (string): required if flyby_id not included
- [REQUIRED/OPTIONAL] flyby_id (string): required if flyby_observation_num not included
- [REQUIRED] segment_num (string): a flyby includes multiple image segments (SXX) where S01 is the primary imaging segment
- [OPTIONAL] resolution (String): resolution options "B", "D", "F", "H", or "I" (2, 8, 32, 128, 256 pixels/degree), defaults to highest resolution 'I'
- [OPTIONAL] top_x_resolutions: Save the top x resolution types (5 total resolutions), will override any default resolution string
- [OPTIONAL] additional_data_types_to_download (List of Strings): Possible options ["ABDR", "ASUM", "BIDR", "LBDR", "SBDR", "STDR"] (NOTE: current v1 functionality does not download any additional data types)
import pydar
pydar.extract_flyby_images(flyby_id='T65',
resolution='D',
segment_num="S01")
extract_flyby_images() will retrieve images from PDS website and saves results in a directory labeled 'pydar_results' with the flyby observation number, version number, and segment number in the title (for example pydar_results/CORADR_0065_V03_S01). Download time depends on file and resolution size but ranges from 1-5 minutes
read_aareadme()
Print AAREADME.TXT to console for viewing
read_aareadme(coradr_results_directory=None,
section_to_print=None,
print_to_console=True)
- [REQUIRED] coradr_results_directory (string): CORADAR results folder downloaded (example: "pydar_results/CORADR_0211_V03_S01/")
- [OPTIONAL] section_to_print (string): Specify a section to print to console from the AAREADME, defaults to print the entire AAREADME.TXT, not case-sensitive
- [OPTIONAL] print_to_console (boolean): Print to console, defaults to true, otherwise function will return output as a string
To see a list of all section_to_print options, see: aareadme_options()
import pydar
pydar.read_aareadme(coradr_results_directory="pydar_results/CORADR_0065_V03_S01",
section_to_print="Volume")
Output = Volume CORADR_0065: Titan Flyby T8, Sequence S15, Oct 27, 2005
import pydar
pydar.aareadme_options()
Output = ['PDS_VERSION_ID', 'RECORD_TYPE', 'INSTRUMENT_HOST_NAME', 'INSTRUMENT_NAME', 'PUBLICATION_DATE', 'NOTE', 'END_OBJECT', 'Volume', 'Introduction', 'Disk Format', 'File Formats', 'Volume Contents', 'Recommended DVD Drives and Driver Software', 'Errata and Disclaimer', 'Version Status', 'Contact Information']
read_lbl_readme()
Print .LBL README to console for viewing
read_lbl_readme(coradr_results_directory=None,
section_to_print=None,
print_to_console=True)
- [REQUIRED] coradr_results_directory (string):
- [OPTIONAL] section_to_print (string): Specify a section to print to console from the AAREADME, defaults to print the entire AAREADME.TXT, not case-sensitive
- [OPTIONAL] print_to_console (boolean): Print to console, defaults to true, otherwise function will return output as a string
To see a list of all section_to_print options, see: lbl_options()
import pydar
pydar.read_lbl_readme(coradr_results_directory="pydar_results/CORADR_0035_S01/",
section_to_print="OBLIQUE_PROJ_X_AXIS_VECTOR")
Output = (0.13498322,0.00221225,-0.99084542)
import pydar
pydar.lbl_options()
Line-By-Line Options (Click to view all)
['PDS_VERSION_ID', 'DATA_SET_ID', 'DATA_SET_NAME', 'PRODUCER_INSTITUTION_NAME', 'PRODUCER_ID', 'PRODUCER_FULL_NAME', 'PRODUCT_ID', 'PRODUCT_VERSION_ID', 'INSTRUMENT_HOST_NAME', 'INSTRUMENT_HOST_ID', 'INSTRUMENT_NAME', 'INSTRUMENT_ID', 'TARGET_NAME', 'START_TIME', 'STOP_TIME', 'SPACECRAFT_CLOCK_START_COUNT', 'SPACECRAFT_CLOCK_STOP_COUNT', 'PRODUCT_CREATION_TIME', 'SOURCE_PRODUCT_ID', 'MISSION_PHASE_NAME', 'MISSION_NAME', 'SOFTWARE_VERSION_ID', 'FILE_NAME COMPRESSED', 'RECORD_TYPE COMPRESSED', 'ENCODING_TYPE', 'INTERCHANGE_FORMAT', 'UNCOMPRESSED_FILE_NAME', 'REQUIRED_STORAGE_BYTES', '^DESCRIPTION', 'FILE_NAME UNCOMPRESSED', 'RECORD_TYPE UNCOMPRESSED', 'RECORD_BYTES', 'FILE_RECORDS', 'LABEL_RECORDS', '^IMAGE', 'LINES', 'LINE_SAMPLES', 'SAMPLE_TYPE', 'SAMPLE_BITS', 'CHECKSUM', 'SCALING_FACTOR', 'OFFSET', 'MISSING_CONSTANT', 'NOTE', '^DATA_SET_MAP_PROJECTION', 'MAP_PROJECTION_TYPE', 'FIRST_STANDARD_PARALLEL', 'SECOND_STANDARD_PARALLEL', 'A_AXIS_RADIUS', 'B_AXIS_RADIUS', 'C_AXIS_RADIUS', 'POSITIVE_LONGITUDE_DIRECTION', 'CENTER_LATITUDE', 'CENTER_LONGITUDE', 'REFERENCE_LATITUDE', 'REFERENCE_LONGITUDE', 'LINE_FIRST_PIXEL', 'LINE_LAST_PIXEL', 'SAMPLE_FIRST_PIXEL', 'SAMPLE_LAST_PIXEL', 'MAP_PROJECTION_ROTATION', 'MAP_RESOLUTION', 'MAP_SCALE', 'MAXIMUM_LATITUDE', 'MINIMUM_LATITUDE', 'EASTERNMOST_LONGITUDE', 'WESTERNMOST_LONGITUDE', 'LINE_PROJECTION_OFFSET', 'SAMPLE_PROJECTION_OFFSET', 'OBLIQUE_PROJ_POLE_LATITUDE', 'OBLIQUE_PROJ_POLE_LONGITUDE', 'OBLIQUE_PROJ_POLE_ROTATION', 'OBLIQUE_PROJ_X_AXIS_VECTOR', 'OBLIQUE_PROJ_Y_AXIS_VECTOR', 'OBLIQUE_PROJ_Z_AXIS_VECTOR', 'LOOK_DIRECTION', 'COORDINATE_SYSTEM_NAME', 'COORDINATE_SYSTEM_TYPE']
Section Header Options (Click to view all)
['PRODUCT DESCRIPTION', 'DESCRIPTION OF COMPRESSED AND UNCOMPRESSED FILES', 'POINTERS TO START RECORDS OF OBJECTS IN FILE', 'DESCRIPTION OF OBJECTS CONTAINED IN FILE']
Use Downloaded Data
display_all_images()
Displays downloaded image .IMG files (unzipped from within the .ZIP files) and display all images in directory
display_all_images(image_directory=None, fig_title=None, cmap="gray", figsize_n=6, fig_dpi=120)
- [REQUIRED] image_directory (string): directory containing a .LBL and .IMG file
- [OPTIONAL] fig_title (str): figure title, defaults to filename
- [OPTIONAL] cmap (str): optional colormaps (see more options), defaults to 'gray'
- [OPTIONAL] figsize_n (int): plot dimensions, defaults to 6x6
- [OPTIONAL] fig_dpi (int): plot dpi, defaults to 120
import pydar
pydar.display_all_images(image_directory="pydar_results/CORADR_0065_V03_S01")
[!Note]
display_all_images()will show all images in the saved results directory
COMING SOON: extractMetadata
Extract Metadata from .FMT and .TAB files
COMING SOON: Extract metadata from .TAB file (using .FMT as a reference)
Development Environment
For developers, to run or test against pydar github repo, a development environment can be created via conda
First, install Miniconda
Then, using the existing environment.yml, a new conda environment can be create to run/test scripts against
conda env create --file environment.yml
Once the environment has been built, activate the environment:
conda activate pydar
Set up pre-commit hooks to ensure standard code formatting and spelling:
pre-commit install
Pre-commit hooks can be manually run before commits:
pre-commit run --all-files
To run existing and new tests from the root directory:
python -m pytest
Credits
Feature Names collected from Gazetteer of Planetary Nomenclature
Instrument information and naming conventions collected from the Cassini Radar User Guide
This material is based upon work supported by the National Science Foundation Graduate Fellowship under Grant No. 2141064. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.
Acknowledging Software
Please acknowledge the use of this software in any publications by citing:
Cassini RADAR data extraction software was provided by C. Y. Schneck and U. G. Schneck and is available at URL: https://github.com/unaschneck/pydar
Please send a copy of such publications to: cyschneck@gmail.com & ugschneck@gmail.com (we'd love to see them!)
Bug and Feature Request
Submit a bug fix, question, or feature request as a Github Issue or to ugschneck@gmail.com/cyschneck@gmail.com
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file pydar-2.0.1.tar.gz.
File metadata
- Download URL: pydar-2.0.1.tar.gz
- Upload date:
- Size: 122.5 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.0.1 CPython/3.13.1
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
da433c3062f6337cfe231cfcb00c5e5101701a329e65084d3ff9dd70372e4c41
|
|
| MD5 |
f93ed6936ff9f35b175fbd5b4a53f8c3
|
|
| BLAKE2b-256 |
f2ea47011432e6f5209a5fc38350c63e6e8f963b6304dcdad6adf5e365b21926
|
File details
Details for the file pydar-2.0.1-py3-none-any.whl.
File metadata
- Download URL: pydar-2.0.1-py3-none-any.whl
- Upload date:
- Size: 102.1 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.0.1 CPython/3.13.1
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
94d181da6aecfcc6b9d4f34022d40a86fd56752a192fa866512bc5ab0274aa64
|
|
| MD5 |
e4fe537ff7b3f783daa8545940d32fe9
|
|
| BLAKE2b-256 |
ef677ffcce7acbc00ec94f7b38785c071bf8519d9648c3bc971f8abe760dcc10
|







