A Python library for robotics research and education

Project description
RoboKinematics




 |
RoboKinematics is a Python package designed to perform kinematic analysis for n-degree-of-freedom serial (open-loop) robot manipulators. This package supports both forward and inverse kinematics, trajectory generation, and Jacobian computation. |
Features
- Forward Kinematics: Calculate the end-effector's position and orientation based on joint angles.
- Inverse Kinematics: Compute joint angles for a desired end-effector position.
- Jacobian Computation: Calculate the robot's Jacobian matrix for velocity and motion analysis.
- Trajectory Generation: Create trajectories for smooth motion between joint configurations.
- Singularity Detection: Detect and handle singular configurations in robot kinematics.
Installation
To install RoboKinematics, you will need Python >= 3.7
To download the latest version of python, visit the official python page.
To install the package, run:
pip install RoboKinematics
Usage Examples
Forward Kinematics Example
from RoboKinematics import CreateKinematicModel
# Define Denavit-Hartenberg (DH) parameters for a 2-joint robot
dh_params = [
{"frame_name": "link1", "joint_type": "r", "link_length": 1.0, "twist": 0, "offset": 0, "theta": 0},
{"frame_name": "link2", "joint_type": "r", "link_length": 1.0, "twist": 0, "offset": 0, "theta": 0}
]
# Create the kinematic model
robot = CreateKinematicModel(dh_params, robot_name="2DOF Robot")
# Perform forward kinematics
joint_angles = [45, 30]
robot.f_kin(joint_angles)
transformation_matrices = robot.get_transforms(2, real=True)
jacobian = robot.jacobian()
print(transformation_matrices,'\n')
print(jacobian)
The output of the program is the transformation matrix from the base frame to the end-effector frame.
The jacobian can be computed using the jacobian(): method (function)
[[ 0.25881905 -0.96592583 0. 0.96592583]
[ 0.96592583 0.25881905 0. 1.67303261]
[ 0. 0. 1. 0. ]
[ 0. 0. 0. 1. ]]
[[-1.67303261 -0.96593 ]
[ 0.96592583 0.25882 ]
[ 0. 0. ]
[ 0. 0. ]
[ 0. 0. ]
[ 1. 1. ]]
Inverse Kinematics Example
...
# Target position of the end-effector
t = robot.SE3(robot.get_transforms(2), merge_res=True)
# Perform inverse kinematics
joint_angles = robot.i_kin(t)
print(joint_angles)
Output in rads:
Convergence achieved in iteration <0> : CONV error 0.000007
[0.7853981633974483, 0.5235987755982988]
Output in degrees: To convert the output to deg, use the numpy.degrees function:
print(np.degrees(joint_angles))
Convergence achieved in iteration <0> : CONV error 0.000007
[44.99997477 30.00003992]
Trajectory Generation Example
from RoboKinematics import CreateKinematicModel
# Define Denavit-Hartenberg (DH) parameters for a 2-joint robot
dh_params = [
{"frame_name": "link1", "joint_type": "r", "link_length": 1.0, "twist": 0, "offset": 0, "theta": 0},
{"frame_name": "link2", "joint_type": "r", "link_length": 1.0, "twist": 0, "offset": 0, "theta": 0}
]
# Create the kinematic model
robot = CreateKinematicModel(dh_params, robot_name="2DOF Robot")
# Perform forward kinematics
joint_angles = [90, 0]
robot.f_kin(joint_angles)
# Target position of the end-effector
target_position = [0.96592583, 1.67303261, 0, 0, 0, 1.30899694]
# Generate a trajectory from an initial to a final joint configuration
initial = robot.get_joint_states(rads=True)
final = robot.i_kin(target_position)
jt = [
initial,
final
]
trajectory = robot.traj_gen(jt, trj_time=[1], pva=0, tr_type="q", plot=True)
Dependencies
- NumPy
- SciPy
- Matplotlib
Class and Methods Overview
CreateKinematicModel
This is the main class which encapsulates all the functionalities for kinematic analysis, including forward kinematics, inverse kinematics, Jacobian calculation, and trajectory generation.
Constructor: __init__(args, robot_name, link_twist_in_rads=False, joint_lim_enable=False)
- Parameters:
args: List of Denavit-Hartenberg (DH) parameters in the form of dictionaries.robot_name: Name of the robot.link_twist_in_rads: IfTrue, treats the twist angles in radians.joint_lim_enable: IfTrue, enforces joint limits.
f_kin(qn, rads=False)
- Description: Computes the forward kinematics, i.e., the transformation matrices for each link of the robot.
- Parameters:
qn: A list of joint values.rads: IfTrue, angles are treated as radians; otherwise, degrees.
- Returns: Homogeneous transformation matrices for each joint.
i_kin(target_position, mask=[1,1,1,1,1,1], tol=1e-6, it_max=100, _damp=1e-2, euler_in_deg=False)
- Description: Computes the inverse kinematics, i.e., finds joint values for a desired end-effector position.
- Parameters:
target_position: The desired position and orientation of the end-effector.mask: A mask that indicates which degrees of freedom are constrained (6D mask).tol: Tolerance for convergence.it_max: Maximum number of iterations._damp: Damping factor for numerical stability.euler_in_deg: IfTrue, Euler angles are given in degrees.
- Returns: Joint values that achieve the desired end-effector position.
get_transforms(stop_index=0, real=False)
- Description: Computes the full transformation matrix for the robot up to the
stop_indexjoint. - Parameters:
stop_index: Specifies up to which joint the transformation should be calculated.real: IfTrue, enables real-number precision printing.
- Returns: The transformation matrix at the specified joint.
jacobian()
- Description: Calculates the robot's Jacobian matrix, which relates the joint velocities to the end-effector velocities.
- Returns: The Jacobian matrix as a NumPy array.
singular_configs_check()
- Description: Checks for singular configurations, where the robot's Jacobian matrix loses rank, indicating potential issues in control.
- Returns: Prints whether a singularity is found.
get_num_of_joints()
- Description: Returns the number of joints in the robot model.
- Returns: Integer representing the number of joints.
traj_gen(tr_lst, trj_time, pva, tr_type, plot=False )
Description:
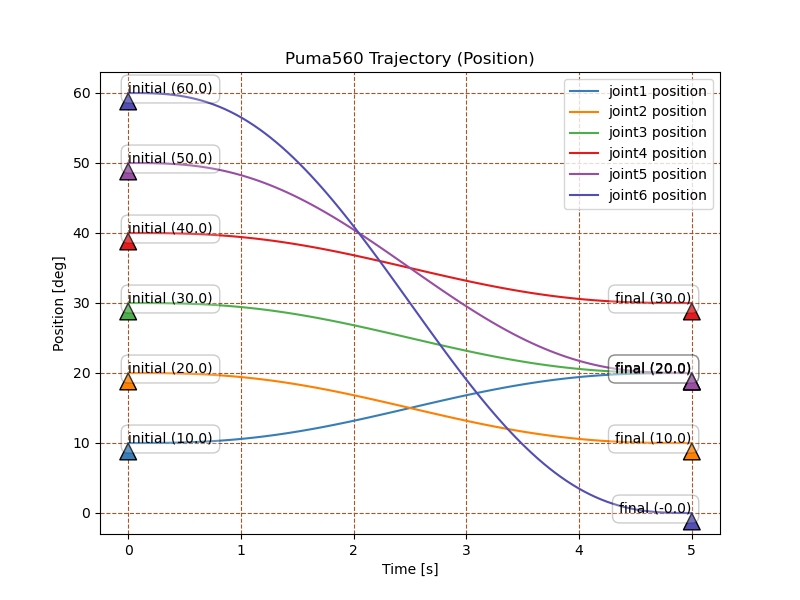
The traj_gen() method generates a complete trajectory between multiple waypoints (positions) over a specified time for each segment. It allows you to define trajectories for position, velocity, or acceleration, and optionally plot the results.
Parameters:
-
tr_lst: A list of waypoints, where each waypoint is a list of joint positions. For example, [q0, q1, q2, ..., qn] where q0 is the starting point and qn is the final point. -
trj_time: A list of time intervals for each segment of the trajectory. For example,[1, 2]specifies that it will take 1 second to move from the first waypoint to the second, and 2 seconds to move from the second to the third. -
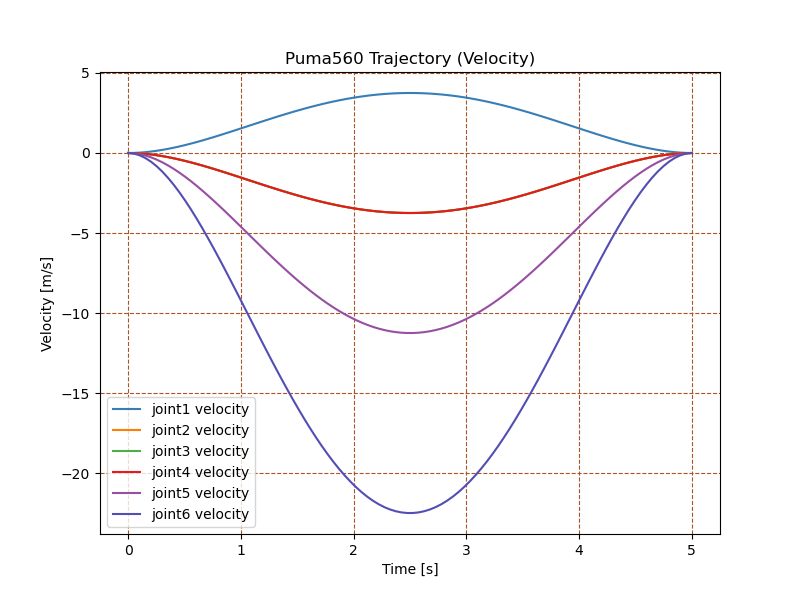
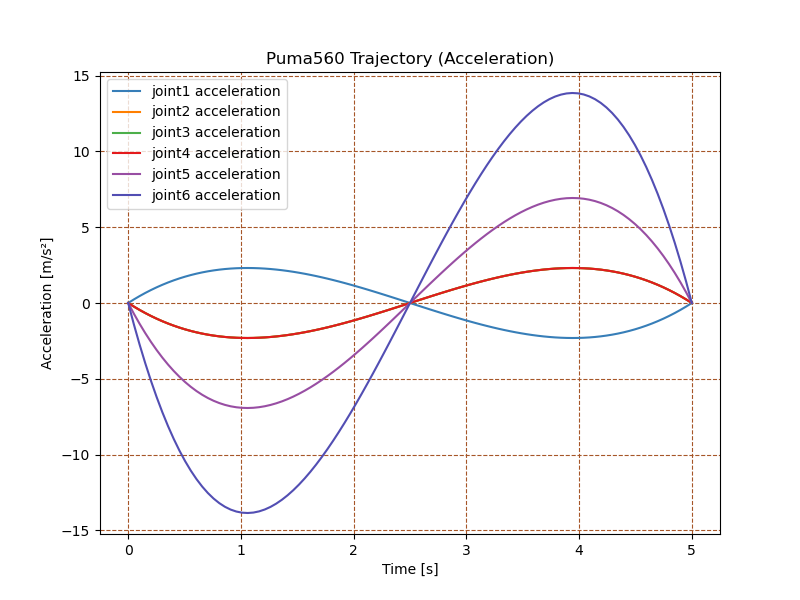
pva: A flag indicating whether to generate a trajectory for position (pva = 0), velocity (pva = 1), or acceleration (pva = 2). -
plot: A boolean (True/False). IfTrue, the generated trajectory is plotted. -
tr_type: Defines the type of trajectory to be generated. "q": represents a quintic polynomial trajectory (5th-degree), ensuring smooth position, velocity, and acceleration transitions. You may also support a cubic trajectory by passing a different value, like "c" for cubic.
Returns:
trajectory: A list of generated trajectories for each joint over time. Each element in the list corresponds to a segment of the full trajectory between two waypoints.
Usage Example:
# Define waypoints (joint configurations) and corresponding time intervals
from RoboKinematics import CreateKinematicModel
# Creates a kinematic model of the 6-axis robot
robot = CreateKinematicModel(
[
{ 'frame_name':'frame0','joint_type':'r','link_length':0.0,'twist':90.0,'offset':0.0,'theta':0.0 },
{ 'frame_name':'frame1','joint_type':'r','link_length':0.4318,'twist':0.0,'offset':0.0,'theta':00 },
{ 'frame_name':'frame2','joint_type':'r','link_length':0.0203,'twist':-90.0,'offset':0.15,'theta':0.0 },
{ 'frame_name':'frame3','joint_type':'r','link_length':0.0,'twist':90.0,'offset':0.4318,'theta':0.0 },
{ 'frame_name':'frame4','joint_type':'r','link_length':0.0,'twist':-90.0,'offset':0.0,'theta':0.0 },
{ 'frame_name':'frame5','joint_type':'r','link_length':0.0,'twist': 0.0,'offset':0.0,'theta':0.0 }
],
robot_name="B1_37")
# Set the time interval, in this case, 5 seconds
trj_t = [5]
robot.f_kin([10, 20, 30, 40, 50, 60])
home = robot.get_joint_states(rads=True)
target = robot.i_kin([0.26453836, -0.06334258, 0.45908105, -0.35924867, -0.7797434, 1.07086644])
# Define waypoints (joint configurations)
waypoints = [
home,
target
]
# Generate a trajectory for position (pva=0) and plot the resultsV
trajectory = robot.traj_gen(waypoints, trj_time=trj_t, pva=0, tr_type="q", plot=True)
Notes:
- You can use
traj_gen()to generate and visualize complex multi-segment trajectories for a robot with multiple joints. - The
pvaparameter allows you to specify whether you want the trajectory for position, velocity, or acceleration. - Example Plot: The method can plot trajectories showing the robot joint positions (or velocities/accelerations) over time for each segment.
|
 |
|
License
This project is licensed under the Apache License, Version 2.0 - see the LICENSE file for details.
Contributing
Contributions are welcome! Please open an issue or submit a pull request on GitHub
Author
Silas Udofia (Silas-U)
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file RoboKinematics-1.0.2.tar.gz.
File metadata
- Download URL: RoboKinematics-1.0.2.tar.gz
- Upload date:
- Size: 20.6 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.0.0 CPython/3.12.3
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
f6654c0e91b7abecd72c95dac4750e1d29270a8dbcee3ca5fae0eb02ab02de1b
|
|
| MD5 |
7091778199e1fa574130d7792a0577b5
|
|
| BLAKE2b-256 |
5f6e49cca24116b8f7cdaf9ed82f9f8e35986e609e25d4539abf02a008e7b759
|
File details
Details for the file RoboKinematics-1.0.2-py3-none-any.whl.
File metadata
- Download URL: RoboKinematics-1.0.2-py3-none-any.whl
- Upload date:
- Size: 16.6 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.0.0 CPython/3.12.3
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
23d7ea67faf2db2952c62b4030cbf3cbcefdfd364cbf932d109c897d61f14e4a
|
|
| MD5 |
b5835bdd09f84df39df435903e894ce9
|
|
| BLAKE2b-256 |
c83d0185dc2591e5485560d38ee741c1fea1324dc15daeb1aad98d107d181715
|







