Nash-equilibrium solutions to linear-quadratic differential games, via a reduction of the Game Hamilton-Jacobi-Bellman equations to coupled algebraic and differential Riccati equations for multi-objective dynamical control systems.
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers

Project description
Nash-equilibrium control for multi-objective dynamical systems, built on coupled Riccati equations.







- What is this?
- Why differential games?
- Installation
- Quick start
- Input parameters
- Tutorial: masses on springs
- More examples
- Testing and development
- Citing
- Acknowledgments
- Star history
What is this?
PyDiffGame is a Python implementation of a
Nash-equilibrium solution to differential games. It reduces the Game
Hamilton–Jacobi–Bellman (GHJB) equations to a set of coupled Game Algebraic and
Differential Riccati equations, and solves them to synthesize feedback controllers for
multi-objective dynamical control systems.
In one sentence: where a classical Linear-Quadratic Regulator (LQR) folds every control
task into one quadratic cost and solves one Riccati equation, PyDiffGame keeps
each task as a separate player, and solves the coupled Riccati system whose fixed point
is their Nash equilibrium. A plain LQR is simply the one-player special case.
The method follows the formulation in:
- The thesis “Differential Games for Compositional Handling of Competing Control Tasks” (ResearchGate)
- The conference paper “Composition of Dynamic Control Objectives Based on Differential Games” (IEEE · ResearchGate)
The package requires Python ≥ 3.11 and is tested on CPython 3.11, 3.12, 3.13 and 3.14.
Why differential games?
| Classical LQR | PyDiffGame |
|---|---|
| A single, hand-blended cost $\int x^\top Q x + u^\top R u$ | One objective per task / player, each with its own $Q_i, R_i$ |
| One Algebraic Riccati Equation | A coupled system of Riccati equations solved to its Nash fixed point |
| Re-tune the whole weight matrix to add a task | Compose tasks by adding a player — the others keep their own cost |
| Continuous time only, by convention | Continuous and discrete time, finite or infinite horizon |
PyDiffGame ships both regulation (drive the state to the origin) and signal tracking
(drive the state to a target $x_T$), a one-call LQR-vs-game comparison harness, cost
accounting on a common yardstick, and ready-made plotting.
Installation
PyDiffGame is published on PyPI and is managed with uv. Add it to your project:
uv add PyDiffGame
To run the bundled examples (which additionally need
python-control):
uv add "PyDiffGame[examples]"
Prefer pip? It works as a fallback.
pip install PyDiffGame
pip install "PyDiffGame[examples]" # with the examples extra
To work on the package itself, clone it and sync the locked development environment with uv:
git clone https://github.com/krichelj/PyDiffGame.git
cd PyDiffGame
uv sync --extra dev # creates .venv with the exact locked dependencies
uv run pre-commit install # enable the formatting / lint / type-check hooks
Then run anything through uv run (uv run pytest,
uv run python -m PyDiffGame.examples.MassesWithSpringsComparison, …). Pip users
can instead pip install -e ".[dev]", though uv is recommended for the exact
locked environment.
Quick start
A plain Linear-Quadratic Regulator is just a one-objective game. The continuous solver
matches scipy.linalg.solve_continuous_are exactly:
import numpy as np
from PyDiffGame import ContinuousLQR
A = np.array([[0.0, 1.0],
[0.0, 0.0]])
B = np.array([[0.0],
[1.0]])
lqr = ContinuousLQR(A=A, B=B, Q=np.eye(2), R=1.0).solve()
print(lqr.K[0]) # optimal feedback gain
print(lqr.is_closed_loop_stable()) # True
For a multi-player differential game, give one Objective per
player. Each player owns a slice of the physical input through a decomposition matrix M:
import numpy as np
from PyDiffGame import ContinuousPyDiffGame, GameObjective
A = np.array([[0.0, 1.0, 0.0, 0.0],
[0.0, 0.0, 0.0, 0.0],
[0.0, 0.0, 0.0, 1.0],
[0.0, 0.0, 0.0, 0.0]])
B = np.eye(4)[:, [1, 3]]
objectives = [
GameObjective(Q=np.diag([1.0, 0.1, 0.0, 0.0]), R=1.0, M=np.array([[1.0, 0.0]])),
GameObjective(Q=np.diag([0.0, 0.0, 1.0, 0.1]), R=1.0, M=np.array([[0.0, 1.0]])),
]
game = ContinuousPyDiffGame(A=A, objectives=objectives, B=B).solve()
# Each converged P_i drives its coupled algebraic Riccati residual to ~0:
print(max(np.max(np.abs(r)) for r in game.algebraic_riccati_residuals())) # ~1e-14
print(game.is_closed_loop_stable()) # True
Input parameters
A game is described by a system matrix A, a set of
Objective
objects (one per player), and an input description (B together with each objective's
decomposition matrix M, or per-player matrices Bs). Construct one of the concrete
solvers —
ContinuousPyDiffGame
or
DiscretePyDiffGame
— with the following parameters:
| Parameter | Type | Meaning |
|---|---|---|
A |
np.ndarray $(n, n)$ |
System dynamics matrix |
objectives |
Sequence[Objective] of length $N$ |
One objective per player; each carries $Q_i$, $R_{ii}$ and optionally $M_i$ |
B |
np.ndarray $(n, m)$, optional |
Full input matrix, used with each objective's decomposition matrix $M_i$ |
Bs |
Sequence[np.ndarray], optional |
Per-player input matrices $B_i$ of shape $(n, m_i)$ — an alternative to B + M |
x_0 |
np.ndarray $(n,)$, optional |
Initial state vector |
x_T |
np.ndarray $(n,)$, optional |
Final (target) state for signal tracking |
T_f |
positive float, optional |
Finite-horizon length; omit (or None) for the infinite-horizon problem |
P_f |
Sequence[np.ndarray], optional |
Terminal Riccati condition (default: uncoupled algebraic Riccati solutions) |
L |
positive int, default 1000 |
Number of time samples |
eta |
positive int, default 5 |
Number of trailing matrix norms inspected for convergence |
epsilon_x, epsilon_P |
float in $(0, 1)$, optional |
Convergence tolerances for the state and the Riccati matrices |
state_variables_names |
Sequence[str] of length $n$, optional |
LaTeX names (without $) for state variables, used in plots |
show_legend |
bool, default True |
Whether plots include a legend |
debug |
bool, default False |
Emit verbose diagnostics while solving |
An Objective takes:
Q—np.ndarray$(n, n)$, symmetric positive semi-definite state weightR—np.ndarray$(m_i, m_i)$ (or a scalar), symmetric positive definite input weightM—np.ndarray$(m_i, m)$, optional decomposition matrix (Nonefor a plain LQR objective)
The helpers LQRObjective(Q, R) and GameObjective(Q, R, M) are thin constructors for
the two common cases.
Tutorial: masses on springs
To show the package in action we compare a differential game against an LQR on a chain of masses connected by springs — a textbook coupled, oscillatory system:
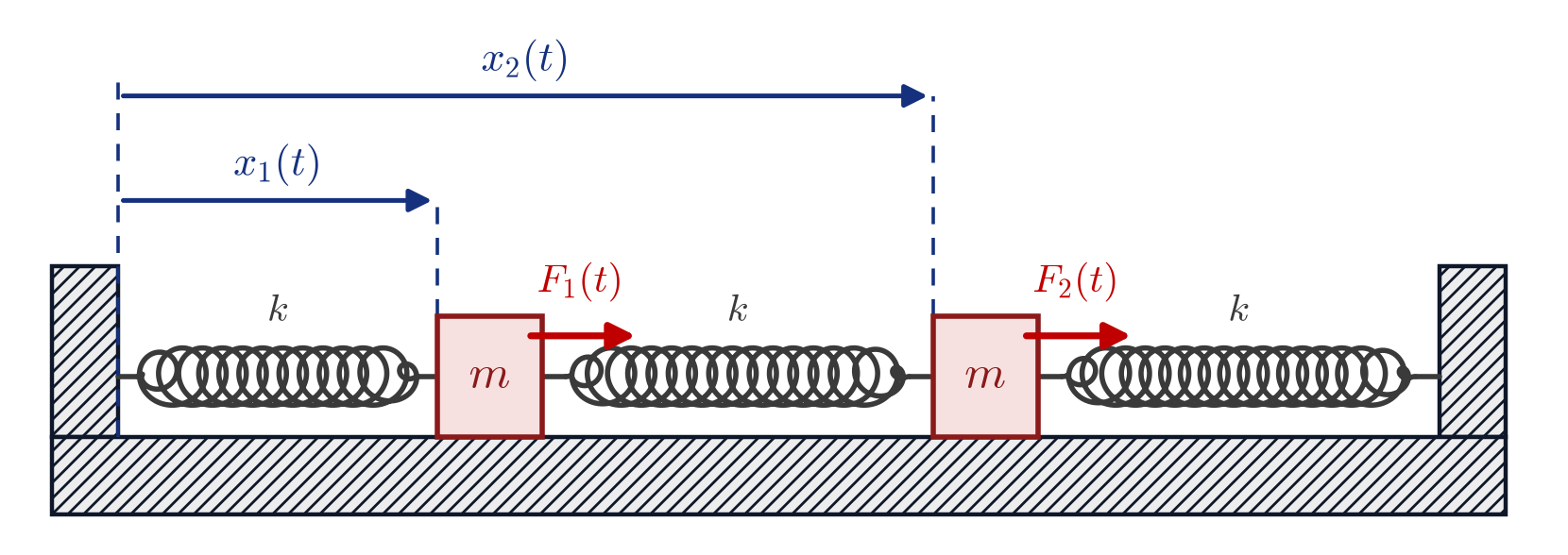
The physical input space is decomposed along the modal directions of $M^{-1}K$, so each
vibration mode becomes one player of a game. The full example lives in
MassesWithSpringsComparison.py;
here is its essence:
import numpy as np
from PyDiffGame import GameObjective, LQRObjective, PyDiffGameLQRComparison
N, m, k, r = 2, 50.0, 10.0, 1.0
q = [500.0, 2000.0] # per-mode state weights
I_N, Z_N = np.eye(N), np.zeros((N, N))
mass_inv_stiffness = (1.0 / m) * k * (2 * I_N - np.eye(N, k=1) - np.eye(N, k=-1))
# Modal decomposition (orthonormal, so the modal transform is orthogonal):
_, eigenvectors = np.linalg.eigh(mass_inv_stiffness)
Ms = [eigenvectors[:, i].reshape(1, N) for i in range(N)]
modal_to_state = np.kron(np.eye(2), np.concatenate(Ms, axis=0))
A = np.block([[Z_N, I_N], [-mass_inv_stiffness, Z_N]])
B = np.block([[Z_N], [(1.0 / m) * I_N]])
game_objectives = []
for i, (q_i, M_i) in enumerate(zip(q, Ms)):
modal_weight = np.diag([0.0] * i + [q_i] + [0.0] * (N - 1) + [q_i] + [0.0] * (N - i - 1))
game_objectives.append(GameObjective(Q=modal_to_state.T @ modal_weight @ modal_to_state, R=r, M=M_i))
# The LQR baseline optimizes exactly the aggregate of the game's objectives
# (sum of the per-mode Q_i, and the matching physical input weight r * I), so
# it is the genuine monolithic optimum to compare the decomposed game against:
modal_weight_total = np.diag(q + q)
lqr_objective = [LQRObjective(Q=modal_to_state.T @ modal_weight_total @ modal_to_state, R=r * I_N)]
x_0 = np.array([10.0, 20.0, 0.0, 0.0])
comparison = PyDiffGameLQRComparison(
A=A, B=B,
games_objectives=[lqr_objective, game_objectives],
x_0=x_0, x_T=x_0 * 10.0, T_f=25.0, L=300,
)
comparison.run(plot_state_spaces=True)
lqr_cost, game_cost = comparison.costs()
print(f"LQR cost = {lqr_cost:.4g}, game cost = {game_cost:.4g}")
Run the bundled example end-to-end:
uv run python -m PyDiffGame.examples.MassesWithSpringsComparison
The monolithic LQR is, by construction, the optimal controller for the aggregate of the game's objectives. The fully decomposed modal game — where each vibration mode is solved as an independent player, coupled only through the shared dynamics — reproduces that monolithic optimum to numerical precision: the two state trajectories coincide (they differ by ~10⁻⁷) and the costs are equal:
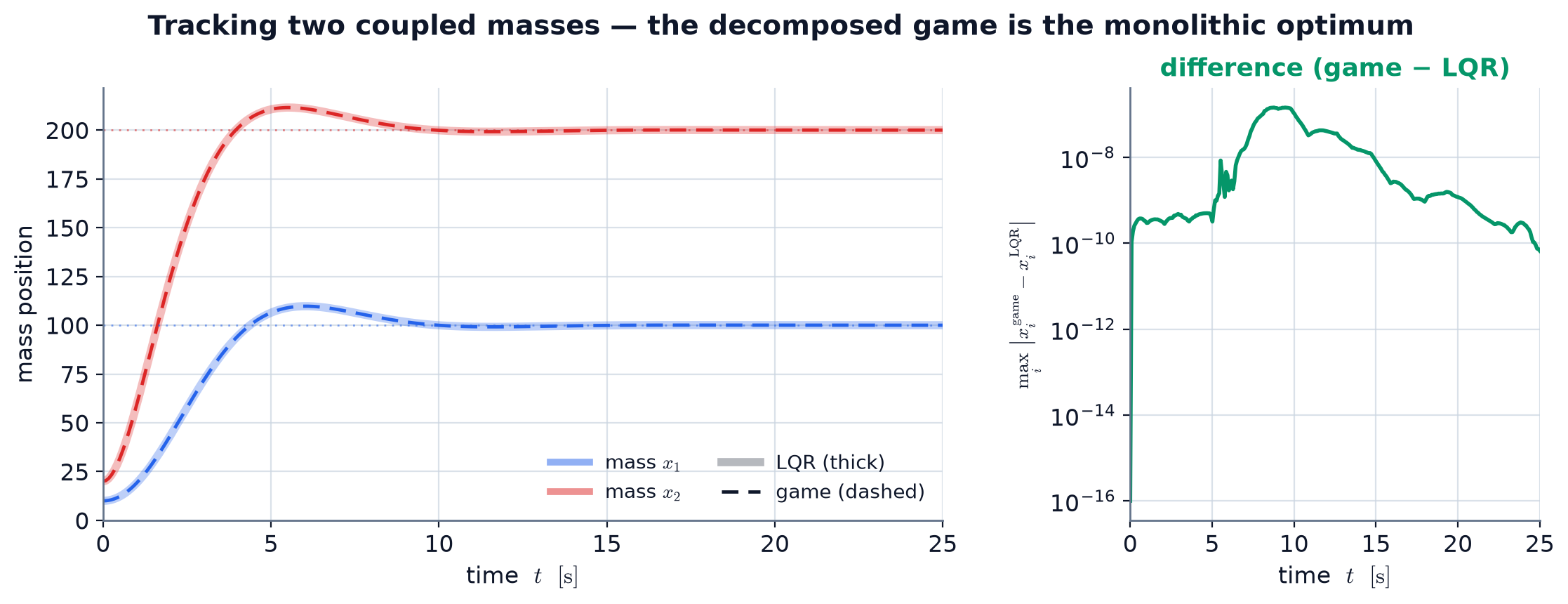
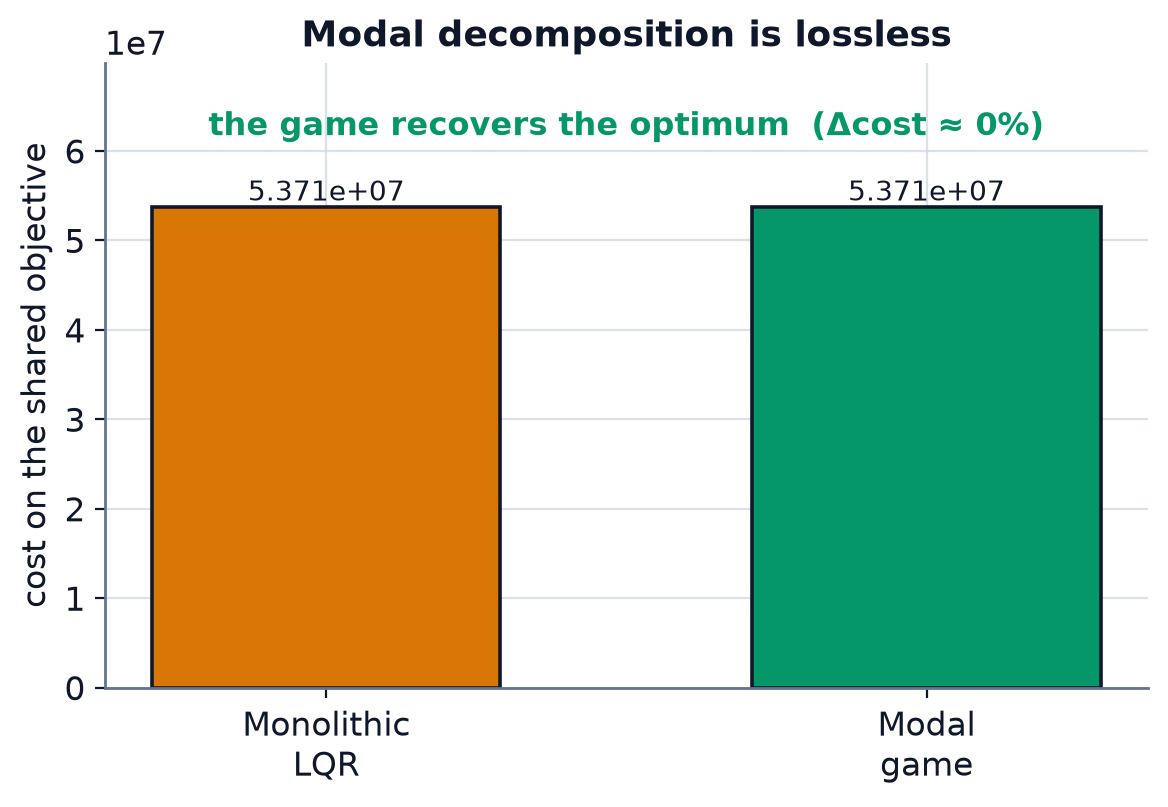
For this modally-decoupled system the decomposition is lossless — and it buys compositionality: you can add, drop or re-weight a control task by editing a single player, without re-tuning one monolithic cost matrix.
The figures above are regenerated from the live solver by
tools/generate_readme_figures.py(uv run python tools/generate_readme_figures.py), so they always match the current code.
More examples
The src/PyDiffGame/examples
directory contains further worked comparisons:
| Example | System |
|---|---|
MassesWithSpringsComparison.py |
Chain of masses coupled by springs (the tutorial above) |
InvertedPendulumComparison.py |
Inverted pendulum on a cart |
PVTOL.py · PVTOLComparison.py |
Planar vertical take-off & landing aircraft |
QuadRotorControl.py |
Quadrotor attitude / position control |
Testing and development
The package ships with a pytest suite that validates the solvers against analytical
ground truth — LQR solutions are checked against scipy's algebraic Riccati solvers, and
the games against their coupled-Riccati residuals and closed-loop stability. All tooling
runs through uv:
uv sync --extra dev
uv run pytest # run the test suite
uv run ruff format src/PyDiffGame tests # auto-format (black-compatible)
uv run ruff check src/PyDiffGame tests # lint
uv run mypy src/PyDiffGame # type-check
Continuous integration runs the formatter check, linter, type checker and full suite on Python 3.11–3.14. See CONTRIBUTING.md for details.
Citing
If you use this work, please cite our paper:
@inproceedings{pydiffgame_paper,
author={Kricheli, Joshua Shay and Sadon, Aviran and Arogeti, Shai and Regev, Shimon and Weiss, Gera},
booktitle={29th Mediterranean Conference on Control and Automation (MED 2021)},
title={{Composition of Dynamic Control Objectives Based on Differential Games}},
year={2021},
pages={298-304},
doi={10.1109/MED51440.2021.9480269}}
Further details can be found in the citation document.
Acknowledgments
This research was supported in part by the Leona M. and Harry B. Helmsley Charitable Trust through the ‘Agricultural, Biological and Cognitive Robotics Initiative’ (‘ABC’) and by the Marcus Endowment Fund, both at Ben-Gurion University of the Negev, Israel. It was also supported by The ‘Israeli Smart Transportation Research Center’ (‘ISTRC’) by The Technion and Bar-Ilan Universities, Israel.


Star history

Project details
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file pydiffgame-2.0.1.tar.gz.
File metadata
- Download URL: pydiffgame-2.0.1.tar.gz
- Upload date:
- Size: 2.2 MB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
23fadfa6d858db485e5de32a93142a5bb5ce2001dff1dfdea1adc1d98075054f
|
|
| MD5 |
fc55735060635abba5ccf4ae19d6485a
|
|
| BLAKE2b-256 |
f3ad353ba15702b81bb3866cf138a0973f3c63e7ae5575bac8ee8bcb18c03557
|
Provenance
The following attestation bundles were made for pydiffgame-2.0.1.tar.gz:
Publisher:
python-publish.yml on krichelj/PyDiffGame
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pydiffgame-2.0.1.tar.gz -
Subject digest:
23fadfa6d858db485e5de32a93142a5bb5ce2001dff1dfdea1adc1d98075054f - Sigstore transparency entry: 1903481891
- Sigstore integration time:
-
Permalink:
krichelj/PyDiffGame@a4017b15350f439f000a55efb1c948cac98115b9 -
Branch / Tag:
refs/heads/master - Owner: https://github.com/krichelj
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
python-publish.yml@a4017b15350f439f000a55efb1c948cac98115b9 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file pydiffgame-2.0.1-py3-none-any.whl.
File metadata
- Download URL: pydiffgame-2.0.1-py3-none-any.whl
- Upload date:
- Size: 1.7 MB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
78058171c1aaadf6e800631b8cfd58afeda1637ba605891167be36edab2e5e2c
|
|
| MD5 |
efbe9db65982970ec73f04e54f5ab3fc
|
|
| BLAKE2b-256 |
a25d55a0991eb2fcc35b6ad55d1c95e3ad50b371557a404545025bc69154c5ff
|
Provenance
The following attestation bundles were made for pydiffgame-2.0.1-py3-none-any.whl:
Publisher:
python-publish.yml on krichelj/PyDiffGame
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pydiffgame-2.0.1-py3-none-any.whl -
Subject digest:
78058171c1aaadf6e800631b8cfd58afeda1637ba605891167be36edab2e5e2c - Sigstore transparency entry: 1903481968
- Sigstore integration time:
-
Permalink:
krichelj/PyDiffGame@a4017b15350f439f000a55efb1c948cac98115b9 -
Branch / Tag:
refs/heads/master - Owner: https://github.com/krichelj
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
python-publish.yml@a4017b15350f439f000a55efb1c948cac98115b9 -
Trigger Event:
workflow_dispatch
-
Statement type:







