No project description provided

Project description


advanced-pid
An advanced PID controller in Python. The derivative term can also be used in practice thanks to built-in first-order filter. Detailed information can be found here.
Usage is very simple:
from advanced_pid import PID
# Create PID controller
pid = PID(Kp=2.0, Ki=0.1, Kd=1.0, Tf=0.05)
# Control loop
while True:
# Get current measurement from system
timestamp, measurement = system.get_measurement()
# Calculate control signal by using PID controller
reference = 1.0
control = pid(timestamp, reference - measurement)
# Feed control signal to system
system.set_input(control)
Complete API documentation can be found here.
Usage
Biggest advantage of advanced-pid, the derivative term has a built-in first-order
filter.
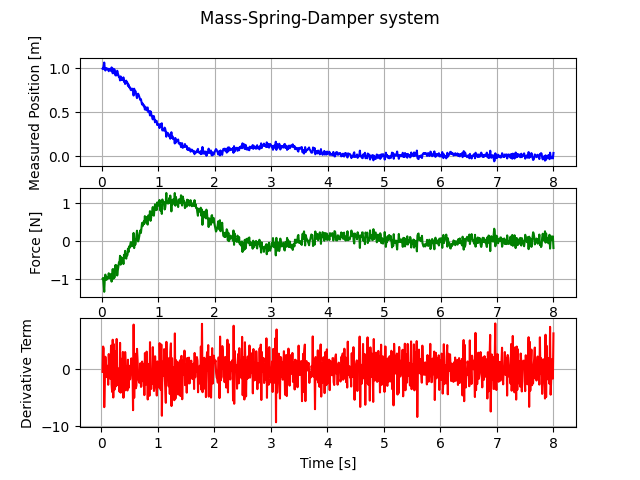
advanced-pid package includes a toy mass-spring-damper system model for testing:
from advanced_pid import PID
from advanced_pid.models import MassSpringDamper
from matplotlib import pyplot as plt
from numpy import diff
# Create a mass-spring-damper system model
system = MassSpringDamper(mass=1.0, spring_const=1.0, damping_const=0.2)
system.set_initial_value(initial_position=1.0, initial_velocity=0.0)
# Create PID controller
pid = PID(Kp=1.0, Ki=0.0, Kd=2.0, Tf=0.5)
# Control loop
time, meas, cont = [], [], []
for i in range(800):
# Get current measurement from system
timestamp, measurement = system.get_measurement()
# Calculate control signal by using PID controller
control = pid(timestamp, -measurement)
# Feed control signal to system
system.set_input(control)
# Record for plotting
time.append(timestamp)
meas.append(measurement)
cont.append(control)
# Plot result
fig, (ax1, ax2, ax3) = plt.subplots(3, 1)
fig.suptitle('Mass-Spring-Damper system')
ax1.set_ylabel('Measured Position [m]')
ax1.plot(time, meas, 'b')
ax1.grid()
ax2.set_ylabel('Force [N]')
ax2.plot(time, cont, 'g')
ax2.grid()
ax3.set_xlabel('Time [s]')
ax3.set_ylabel('Derivative Term')
ax3.plot(time[1:], diff(meas)/diff(time), 'r')
ax3.grid()
plt.show()
As It can be seen in the figure, derivative term cannot be use without a filter:
Installation
To install, run:
pip3 install advanced-pid
Tests
To run tests, run:
python -m unittest tests.test_pid
License
Licensed under the MIT License.


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file advanced-pid-0.0.8.tar.gz.
File metadata
- Download URL: advanced-pid-0.0.8.tar.gz
- Upload date:
- Size: 5.2 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.1 CPython/3.9.13
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
b9f51bccbdfbd129a782dfb0c42be45148c4c900a80c6e471b08c53c2638ab5b
|
|
| MD5 |
0d99b6aec47020c417f7a4e3c537809f
|
|
| BLAKE2b-256 |
171c6ecdd637951c971edd7b8633142f8338f46fab3bb4eee1e2d7333f2f68ad
|
File details
Details for the file advanced_pid-0.0.8-py3-none-any.whl.
File metadata
- Download URL: advanced_pid-0.0.8-py3-none-any.whl
- Upload date:
- Size: 6.1 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.1 CPython/3.9.13
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
469fcff1b21bcd95fb40914d2424e180ec1ef308425608c7a200a4318800c8b3
|
|
| MD5 |
d7d2c4cff77ce31b45558ebbfefb6b54
|
|
| BLAKE2b-256 |
304ec58a27680c950635936c77ee5e0248d917281cec275f6456b05d5eb7cbae
|







