The Python affine6p lib to estimate affine transformation parameters between two sets of 2D points

Project description
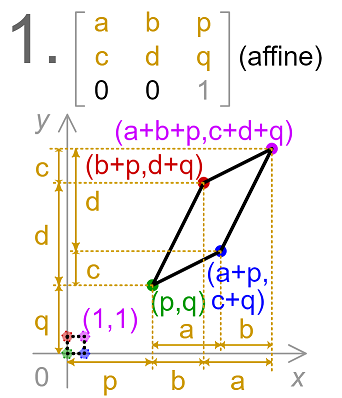
The Python affine6p lib is to estimate affine transformation parameters between two sets of 2D points.:
| x' | | a b p | | x | | y' | = | c d q | | y | | 1 | | 0 0 1 | | 1 |
When the sets are more than three points, the lib estimate parameters with the least squares method.
In making this lib, I used a lot of ideas in nudged lib. Ref: https://github.com/axelpale/nudged-py
Install
Use pip:
pip install affine6p
Usage
You have lists of points for the original and converted of the transformation function to be estimated:
import affine6p origin = [[0,0], [1,0], [0,1], [1,1]] convert = [[0,0], [1,0], [0,1], [1,1.1]] trans = affine6p.estimate(origin, convert) trans.get_matrix() # [[1.0, 0.0, 0.0], # [0.050000000000000044, 1.05, -0.02499999999999991], # [0, 0, 1]] affine6p.estimate_error(trans, origin, convert) # 0.025000000000000022
When the number of origin is 1, assume the following relationship:
a = d = 1 and b = c = 0
When the number of origin is 2, assume the following relationship as described in estimate_helmert.:
a = d and b = -c
You can access Transform class members.:
trans.a() # params[0] trans.b() # params[1] trans.c() # params[2] trans.d() # params[3] trans.p() # params[4] trans.q() # params[5] trans.get_matrix() # [[a, b, p], [c, d, q], [0, 0, 1]] trans.get_rotation_x() # math.atan2(-b, a) trans.get_rotation_y() # math.atan2(c, d) trans.get_scale_x() # sqrt(a*a + b*b) trans.get_scale_y() # sqrt(c*c + d*d) trans.get_scale() # sqrt((scale_x*scale_x+scale_y*scale_y)*0.5) trans.get_translation() # [p, q] trans.params # [a, b, c, d, p, q]
You can apply transform or rotate to 2D point or points. The rotate means p = q = 0.:
trans.transform([0, 0]) trans.transform([[0, 0], [1, 1]]) point = [0, 0] trans.transform_inv(point) trans.rotate(point) trans.rotate_inv(point)


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file affine6p-1.0.0.tar.gz.
File metadata
- Download URL: affine6p-1.0.0.tar.gz
- Upload date:
- Size: 4.1 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
6cfdc0ab4ee663f66ba70b2204dd58805f64d2f1a12c6c92cb38bd1af1fa469c
|
|
| MD5 |
b2cd54f2cc47d4d7377aaf713d9bede6
|
|
| BLAKE2b-256 |
b663e9ca1ad9186afcffff177ebb42eea0cfa67f69954e82145e122a6228b8bc
|
File details
Details for the file affine6p-1.0.0-py2.py3-none-any.whl.
File metadata
- Download URL: affine6p-1.0.0-py2.py3-none-any.whl
- Upload date:
- Size: 5.9 kB
- Tags: Python 2, Python 3
- Uploaded using Trusted Publishing? No
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
69c6653b9b4500f1ae283eb0d6438352cdd5e974bbf861d21d896d1846910644
|
|
| MD5 |
ff408c9292e92a8bf117403d944b3917
|
|
| BLAKE2b-256 |
3389519563e336bf18f5fe44f9e0378d130c8c4e38d4ff357eeb9fd00369d52f
|







