A distributed reinforcement learning experimentation platform running in a terminal

Project description
AI Hydra - Reinforcement Learning Platform
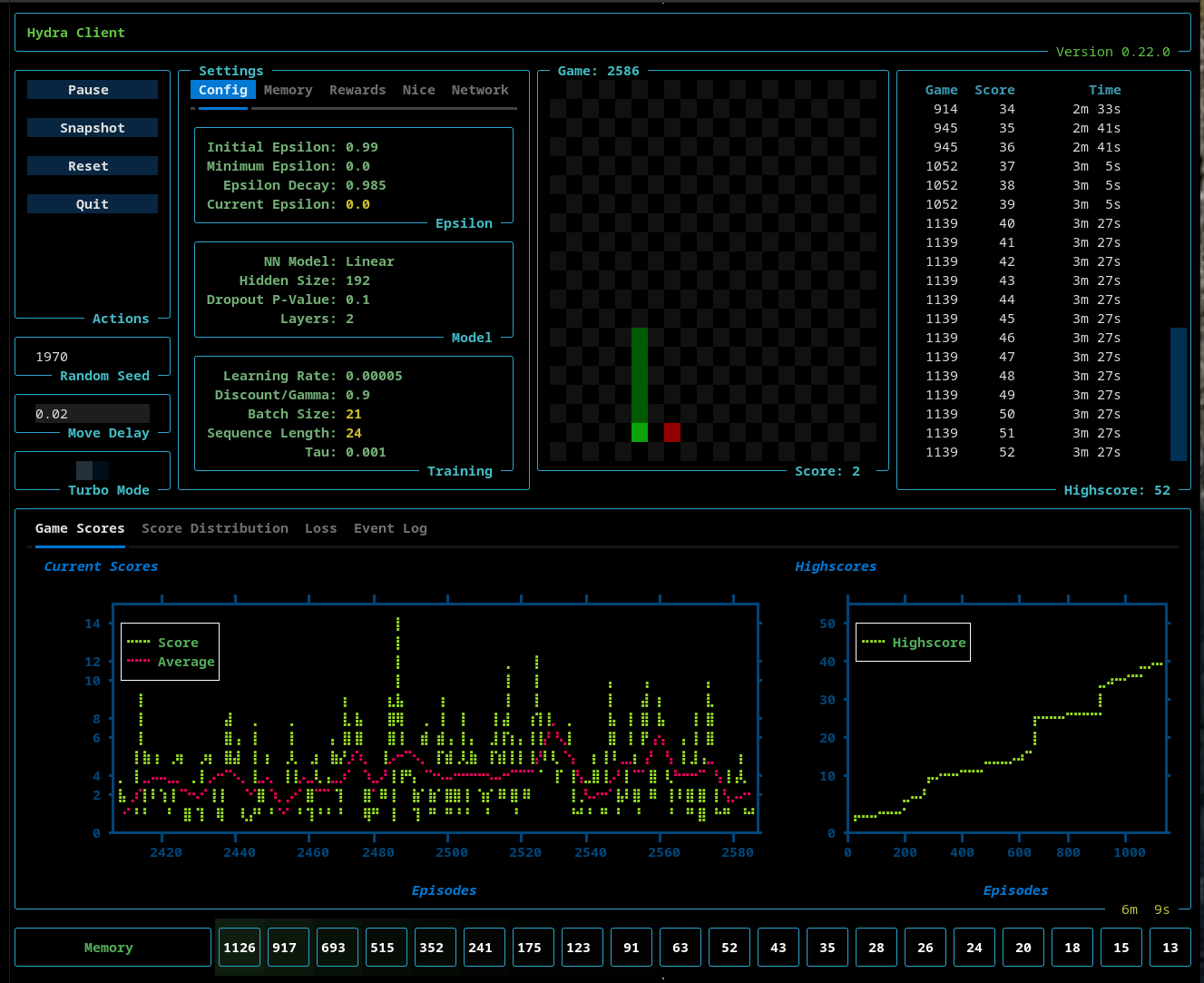
Table of Contents
- Overview
- Installation
- Startup
- Shutdown
- Distributed Architecture
- Settings
- Turbo Mode
- Random Seed
- Move Delay
- Config Settings
- Memory Settings
- Rewards Settings
- Policy Settings - EpsilonNice and Monte Carlo Tree Search
- Network Settings
- Deterministic Simulations
- Supported Models: Linear, RNN, GRU
- Visualizations
- ATH Replay Memory
- Train Manager
- Epsilon Nice - Safe Exploration
- Performance
- Snapshot Report
- Closing Thoughts
Overview
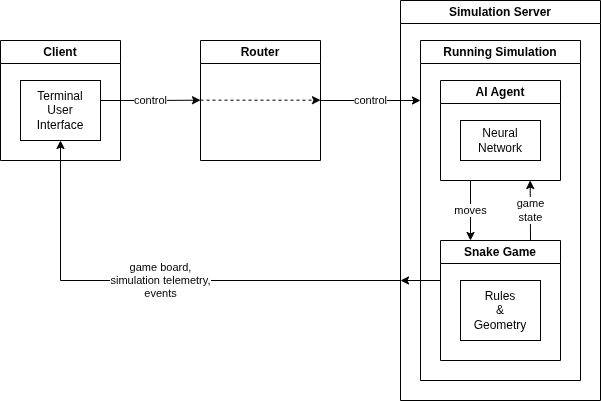
AI Hydra is a distributed reinforcement learning platform composed of three core components:
- HydraClient — a Textual TUI for control and visualization
- HydraRouter — a lightweight message router
- HydraMgr — a headless simulation and training engine
All components communicate over ZeroMQ, forming a clean separation between control, execution, and visualization.
The client sends control messages (e.g., handshake, start) to the router, which forwards them to the server. The server runs the simulation and publishes telemetry via PUB/SUB sockets. The client subscribes to these streams and renders the system state in real time.
Telemetry is split into two channels:
- Per-step updates — board state (snake position, food, score)
- Per-episode updates — metrics (high score, loss, epsilon, etc.)
This separation allows fine-grained control over performance and observability.
Installation
$ python3 -m venv hydra-venv
$ . hydra-venv/bin/activate
hydra-venv> pip install ai-hydra
Startup
Start each component in its own terminal:
1. Client
$ . hydra-venv/bin/activate
hydra-venv> ai-hydra-client
2. Router
$ . hydra-venv/bin/activate
hydra-venv> ai-hydra-router
3. Server
$ . hydra-venv/bin/activate
hydra-venv> ai-hydra-mgr
After starting the three processes:
- Click Start in the HydraRouter
- Click Handshake in the HydraClient
This sends a HANDSHAKE message through the router to the server.
If the client cannot connect to the server, then nothing will happen.
If the server is reachable, then the Start button appears, and the simulation settings will also appear and be editable.
To launch the simulation, click on the Start button. Upon starting, the Pause and Reset buttons will appear. These allow the user to pause a running simulation, or reset the simulation, which takes you back to the post-handshake display.
Shutdown
In this early release, the server can only be stopped by hitting Control-C in the terminal where it's running. The client is stopped by hitting the Quit key. The HydraRouter can be shut down by clicking the Quit button.
The shutdown process is not 100% clean, so you may be required to also hit Control-C on the client to fully stop it.
Distributed Architecture
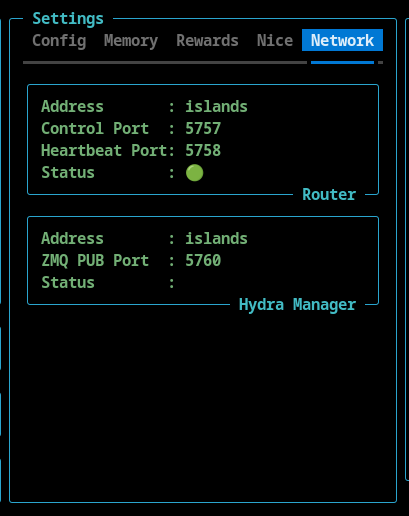
AI Hydra components run independently and can be deployed across different machines. The runtime configuration can be viewed in Settings widget under the Network tab.
Example, Custom, Distributed Deployment
This configuration demonstrates a fully distributed setup where simulation, routing, and visualization are physically separated across hosts. This example also uses custom ports. The Hydra Client is running locally, the Hydra Router is running on bingo, and the Hydra Manager is running on islands.
1. Client
# Client (local machine)
$ . hydra-venv/bin/activate
hydra-venv> ai-hydra-client --router-port 6757 --router-hb-port 6758 --server-pub-port 6760 --router-address bingo --server-address islands
2. Router
# Router (bingo)
$ . hydra-venv/bin/activate
hydra-venv> ai-hydra-router --port 6757 --hb-port 6758
3. Server
# Manager / Simulation (islands)
$ . hydra-venv/bin/activate
hydra-venv> ai-hydra-mgr --port 5759 --router-port 6757 --router-hb-port 6758 --router-address bingo
Settings
Turbo Mode
The client supports a Turbo mode that disables per-step updates. This removes rendering overhead and allows the simulation to run 15×+ faster, making it ideal for rapid experimentation.
Random Seed
AI Hydra is fully deterministic and the random seed for a simulation run is visible and can be set in the TUI.
Move Delay
When the a simulation is not running in turbo mode, the movement of the snake is too fast to see clearly. The move delay introduces a delay between steps that slows the simulation down.
Config Settings
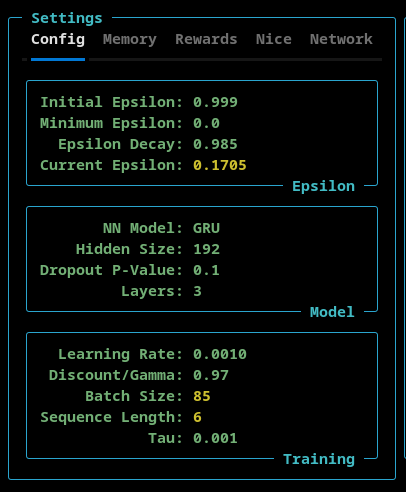
The Config settings tab allows the user to set:
- Epsilon - Initial, minimum, and the epsilon decay rate. The current epsilon value is also shown here
- Model - The model type (Linear, RNN, or GRU), the number of nodes in the hidden layers, the p-value of the model's dropout layer, and the number of layers is configurable here.
- Training - The learning rate, discount/gamma and tau settings can be set here. The current batch size and sequence length (as set by the ATH Memory) are displayed here.
IMPORTANT NOTE: The different models (Linear, RNN, and GRU) had different default values associated with them. When you select a model from the NN model dropdown menu, the defaults for that model are loaded into the TUI. So, if you want a custom setting you must do that after you select the model type.
Memory Settings
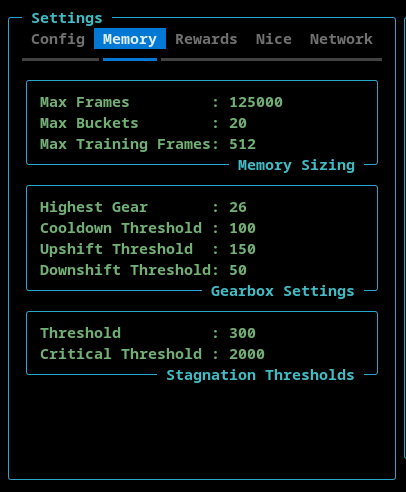
The Memory tab allows the user to configure the ATH Memory.
- Memory Sizing
- The Max Frames sets the maximum number of stored frames. The ATH Memory stores complete games. When the totaly number of frames exceeds this value, the oldest game is deleted from memory.
- The Memory Buckets is a read-only setting that shows how many memory buckets are used.
- The Max Training Frames sets the maximum number of frames (sequnce length * batch size) used during training.
- Gearbox Settings
- The Highest Gear can be set here to limit the sequence length and batch size.
- The Cooldown Threshold determines the minimum number of episodes that must be executed before a gear shift can occur.
- The Upshift Threshold and DownShift Threshold determine when the ATH Memory shifts up or down, respectively. This number is the total number of frames stored in the last three memory buckets.
Rewards Settings
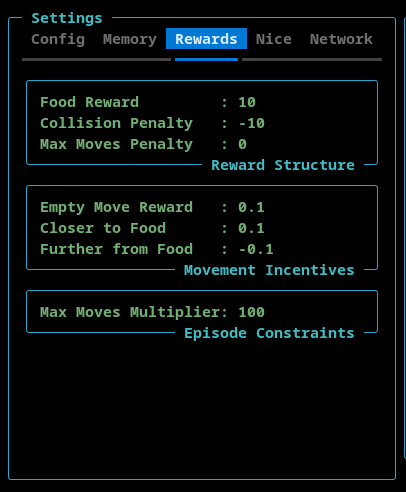
- Reward Structure - This section contains the reward that is allocated to the AI when the snake finds food, hits the wall or itself, or exceeds the maximum number of moves.
- Movement Incentives - This section contains rewards that can be assigned for moving into an empty square, moving towards the food, and moving away from the food.
- Max Moves Multiplier - This setting is used to configure the maximum number of moves the AI can make before the game ends. This is to avoid games where the AI circles endlessly. The maximum number of allowed moved is calculated by multiplying the length of the snake by this max moves multiplier.
Policy Settings
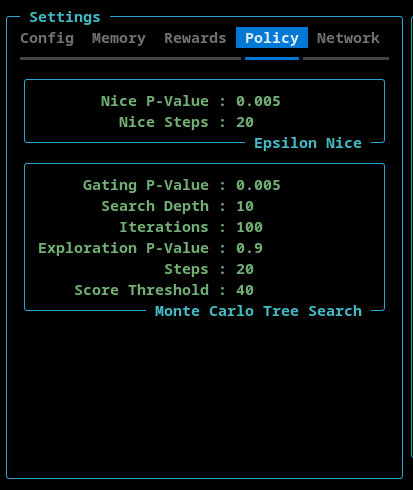
This tab contains settings for EpsilonNice and the Monte Carlo Tree Search features.
EpsilonNice
This policy execute a configurable number of steps in a random direction such that the move does not result in a collision (if possible).
- Nice P-Value - The probability that the EpsilonNice policy will be activated.
- Nice Steps - The number of consecutive game steps that will be executed using the EpsilonNice algorithm.
Monte Carlo Tree Search
This policy implements a limited Monte Carlo Tree Search (MCTS). The goal is not to replace the neural network, but to selectively enrich the training data in complex situations.
By design, MCTS operates sparingly and in bursts.
A burst is a short sequence of consecutive steps during which decision-making is temporarily delegated from the neural network to the MCTS. Outside of these bursts, the system behaves normally.
- Gating P-Value - This is the probability that the MCTS policy is activated.
- Search Depth - The maxiumum number of steps, into the future, that simulation looks.
- Iterations - The number of MCTS simulations performed per decision.
- Each iteration expands and evaluates part of the search tree.
- Higher values → more accurate action selection.
- Exploration P-Value - The exploration constant used in the UCB (Upper Confidence Bound) formula
- Controls the balance between:
- exploiting known good actions (lower values)
- exploring less visited actions (higher values)
- Controls the balance between:
- Steps - The length of an MCTS burst.
- Once triggered, MCTS remains active for this many consecutive steps.
- Enables MCTS to guide short action sequences, not just individual moves.
- Score Threshold - A game must have achieved or surpassed this value for the MCTS to tigger.
IMPORTANT NOTE: If the EpsilonNice algorithm is active, then the MCTS will not trigger.
Network Settings
This section shows the hostnames and port numbers that AI Hydra is using. These can be configured during startup using command line switches.
Deterministic Simulations
Simulations are fully deterministic.
Given the same configuration and random seed:
- Episode progression is identical
- Scores occur at the same episodes
- Pausing/resuming does not affect outcomes
This enables reliable experimentation and reproducibility.
You can also vary only the random seed to validate that results are not artifacts of a “lucky run.”
Supported Models: Linear, RNN, and GRU
- Linear Model
- Recurrent Neural Network (RNN)
- Gated Recurrent Network (GRU)
Model selection is available directly in the TUI.
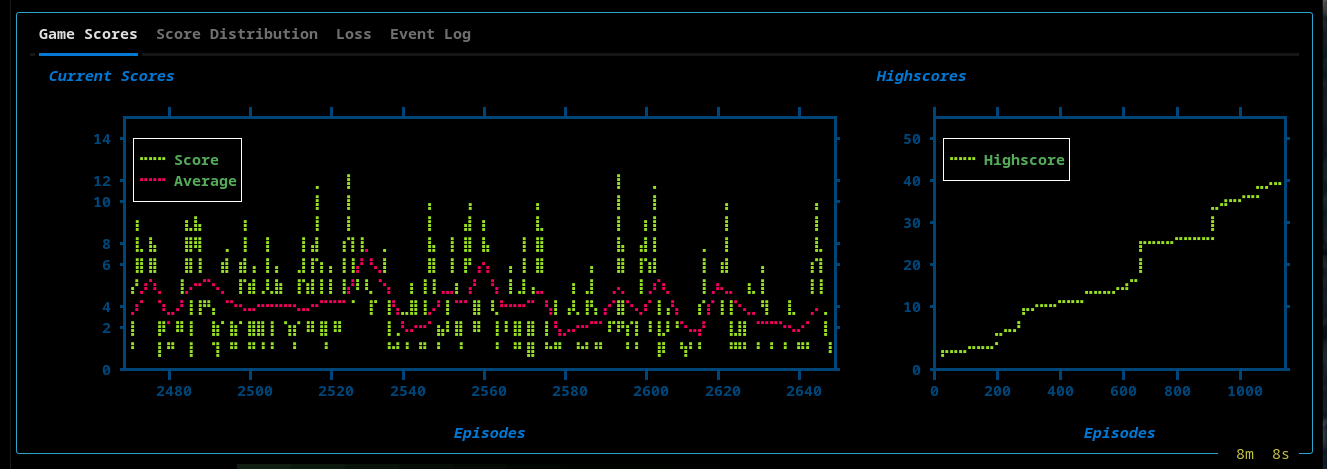
Visualizations
The TUI provides real-time insight into training:
- Live Snake board
- High score tracking
- Score plots
Views include:
High Scores, Current, and Average Current Scores
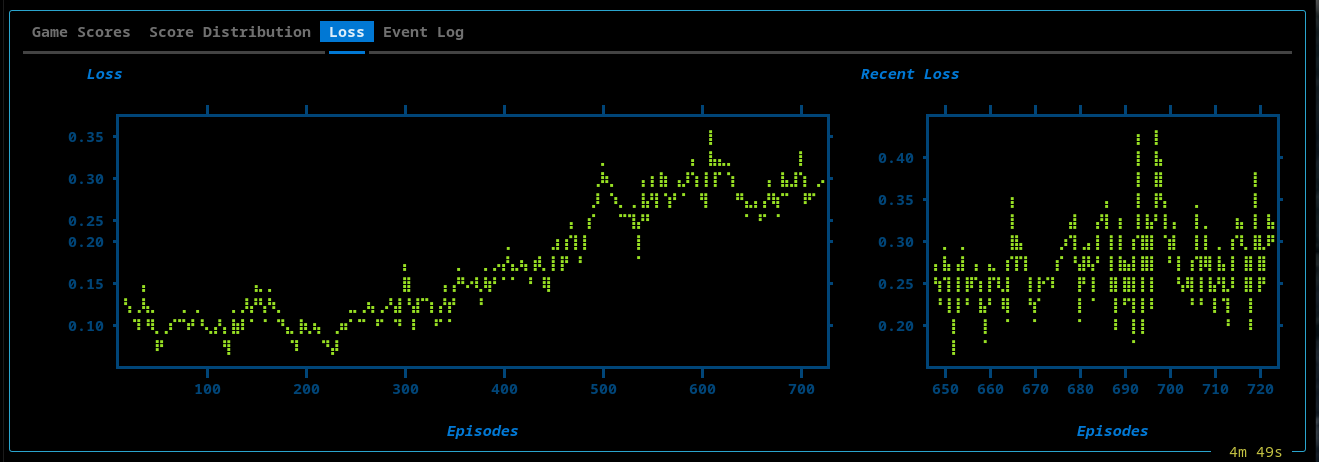
Loss Plot
- Full training loss over time
- Sliding window (recent 75 episodes)
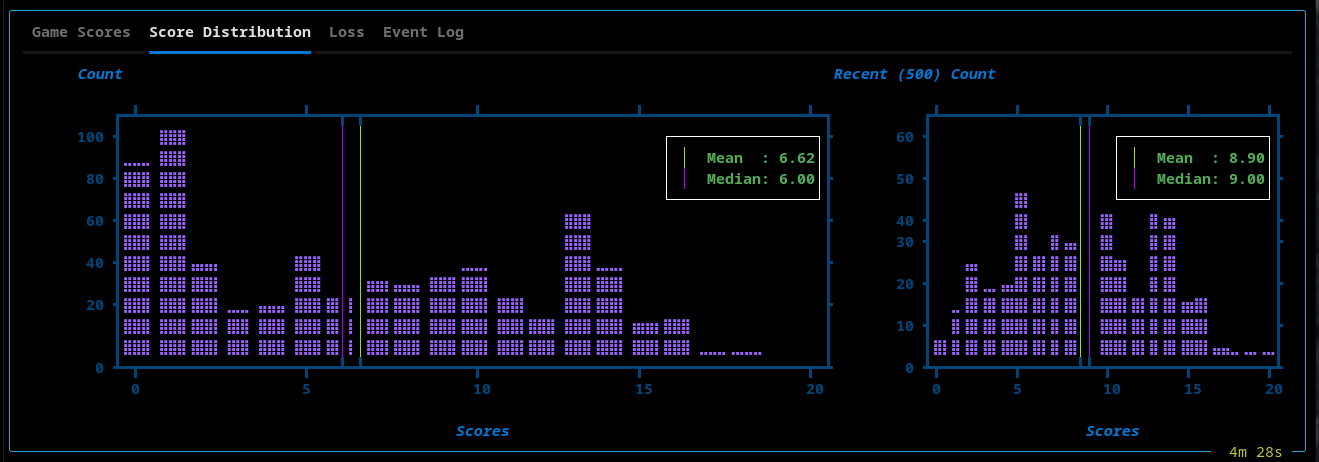
Scores Distribution
- Global score histogram
- Recent performance window (last 500 episodes)
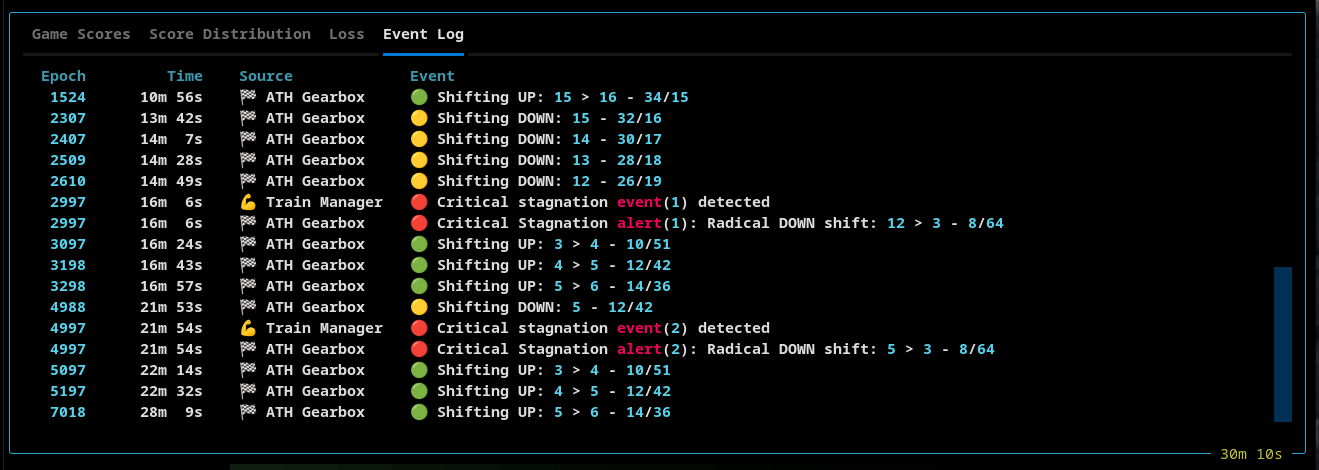
Event Log
A structured event stream capturing system behavior:
- Simulation lifecycle
- Replay memory transitions
- Gear shifts and thresholds
ATH Replay Memory
The ATH Replay Memory is a core component of AI Hydra.
It sits between the simulation and the Trainer, and controls how experience is stored, organized, and sampled for learning. It is a key driver of emergent behavior.
A key takeaway is that the AI can learn new policies even when it is trained on the same underlying data, simply by changing how that data is sampled.
In particular, reducing the sequence length can expose patterns that are not learned when using longer sequences. Evidence suggests that some behaviors are easier to learn from shorter temporal windows, and are diluted or obscured when the sequence length is too long.
In effect, changing the sequence length changes the temporal resolution at which the agent learns.
ATH Overview
- Games are stored as ordered sequences of frames.
- At the end of each episode, the Trainer asks the ATH Replay Memory for training data.
- The ATH Memory returns a batch of ordered frames.
- This ordered set of frames is referred to as a sequence.
- The number of ordered frames is referred to as the sequence length.
- The number of sequences that are returned is the batch size
ATH Gears
At the core of ATH Memory is the concept of a gear.
- When the simulation starts, the initial gear is one.
- When the ATH Memory is in first gear (gear one), the sequence length is 4.
- Gear 2 has a sequence length of 6.
- Gear 3 has a sequence length of 8.
- Every shift to a higher gear, increases the sequence length by two.
Batch Size
One of the ATH Memory settings is the Max Training Frames parameter.
The batch size is determined by this simple calculation:
batch_size = max_training_frames // sequence_length
The minimum size of a batch is one.
Buckets
The ATH Memory contains 20 buckets. The number 20 was arrived at by experimentation and was determined to be a useful number.
As outlined above, a stored game is broken down into sequences, or ordered sets of frames.
- Slicing of a game into sequences starts at the last frame of each game and works its way forward
- This ensures that the final frame (with the reward) is always captured
For example:
- Assume that ATH Memory is in first gear
- This means the sequence length is 4
- If the game has 17 frames, then:
- It will contain 4 sequences, each containing 4 frames
- The first frame will be discarded
- The ATH Memory will put this game into bucket 1, 2, 3, and 4
When the system shifts to the second gear, the data is reorganized using the new sequence length of 6:
- Now the 17 frames will be split into 2 sequences
- Each sequence contains 6 frames
- The first 5 frames will be discarded
- The ATH Memory will now put the same game into bucket 1 and 2
Warmed Buckets
A bucket is defined as being warm when it contains at least one game.
Selecting Training Data
When the Trainer asks the ATH Memory for training data, the goal is to construct a batch of sequences that all have the same length.
- The ATH Memory creates a batch using games from all active buckets
- A batch will contain sequences from:
- early-stage gameplay
- mid-game gameplay
- late-game gameplay
Key Concept: Sampling occurs across time.
In a traditional replay memory, sequences from the ends of long-running games are underrepresented.
Gearbox Shifting
The ATH Replay Memory contains an ATH Gearbox module that is responsible for changing gears. Its behavior depends on the following settings:
-
Upshift threshold
-
Downshift threshold
-
Cooldown threshold
-
If the last three buckets combined contain at least upshift threshold games, the ATH Gearbox will shift up
-
If the last three buckets combined contain fewer than downshift threshold games, the ATH Gearbox will shift down
-
The gearbox will not perform any shifting until cooldown threshold episodes have elapsed
Stagnation Shifting
The Train Manager also plays a role in gear shifting. Its behavior is determined by the following stagnation settings:
-
Stagnation threshold
-
Critical stagnation threshold
-
If stagnation threshold episodes elapse without a new high score, the Train Manager sends a stagnation alert to the ATH Gearbox
- The gearbox will shift down one gear, unless it has shifted up within the last stagnation threshold episodes
-
If critical stagnation threshold episodes elapse without a new high score, the Train Manager sends a critical stagnation alert to the ATH Gearbox
- The gearbox will shift directly to gear 1 (sequence length 4)
ATH Memory Telemetry
The TUI memory widget shows the number of games each bucket contains. Note that this number changes when the gear changes.

Lifecycle events such as warm-up, pruning, and gear shifts are emitted and tracked in real time and can be seen in the Event Log tab of the TUI.
Train Manager
TrainMgr is the central coordinator for AI Hydra’s learning loop.
It is responsible for constructing and wiring together:
- the model and trainer
- replay memory
- the base action policy
- the Epsilon Nice policy wrapper
- stagnation detection and recovery behavior
TrainMgr does more than orchestrate training. It also acts as the system’s
recovery controller.
When progress stalls, TrainMgr emits stagnation alerts to adaptive subsystems
so they can respond in different ways:
- ATH Gearbox adjusts sequence length and batch size by shifting gears
- Epsilon Nice can be enabled as a bounded corrective policy layer
Additionally, when a new high score is achieved the Train Manager calls
reset_cooldown() on the ATH Gearbox delaying an upshift to allow the AI
to fully exploit the opportunities at the current sequence length and batch
size.
This makes stagnation a first-class runtime signal rather than a passive metric.
The result is a coordinated feedback system where memory dynamics and policy behavior can both adapt when learning plateaus.
Epsilon Nice - Safe Exploration
Epsilon Nice Overview
Epsilon Nice is a conditionally enabled policy wrapper that can temporarily redirect action selection into a short safe-detour mode.
It is not a one-step correction and it is not always active.
Instead, once normal epsilon exploration has effectively ended, Epsilon Nice may be enabled by the training system. When enabled, it can probabilistically arm a temporary intervention window. During that window, action selection is redirected toward safe alternatives for a fixed number of steps.
This allows the agent to break out of locally bad or stagnant behavior without permanently replacing the underlying learned policy.
How It Works
At each step:
- The base policy selects an action.
- If normal epsilon exploration is still active, that action is returned unchanged.
- If Nice is not enabled, the action is returned unchanged.
- If Nice is enabled:
- with probability
p_value, Nice arms a detour - once armed, Nice remains active for
stepsturns - during those turns, it attempts to replace the suggested action with a safe alternative
- with probability
So:
p_valuecontrols how often a Nice detour beginsstepscontrols how long the detour lasts
Override Behaviour
During an active Nice detour, the policy looks at the other available actions and gathers the non-colliding alternatives.
- If safe alternatives exist, one is selected at random
- If no safe alternative exists, the original action is preserved
This means Nice does not simply “block fatal moves.”
It temporarily moves the policy into a safe-alternative action mode for a
bounded number of steps.
Key Properties
- Post-epsilon gated - Nice does nothing while normal epsilon exploration is still active
- Externally controlled - Enabled and disabled by the training system
- Probabilistic arming -
p_valuecontrols entry into Nice mode - Multi-step intervention -
stepsdefines the length of the detour - Safe-alternative sampling - Overrides choose from non-colliding alternatives when available
- Deterministic-friendly - Uses the shared RNG
- Observable - Reports rolling stats such as calls, triggers, overrides, fatal suggestions, and no-safe-alternative cases
Telemetry
Epsilon Nice tracks and reports:
- calls
- triggers
- overrides
- fatal suggested actions
- no-safe-alternative cases
- trigger rate
- override rate
These statistics are emitted on rolling windows, allowing the TUI to show how often Nice is being consulted and how often it actually changes behavior.
Performance
AI Hydra is designed for high-throughput training on consumer hardware, without relying on a GPU.
Its performance comes from two complementary design pillars:
Aligned Training Pipeline
The training path is tightly aligned across memory, batching, and model execution.
- Replay memory stores full episodes and exposes variable-length sequences via metadata
- Sequences are constructed without expensive transformation or reshaping
- Batches are fed directly into the model’s sequence-forward path
This creates a continuous pipeline:
memory → sequence assembly → batched training → model forward
Because each stage is designed to match the next, the system avoids unnecessary copying, slicing, or recomputation.
Lean Simulation Loop
The core run loop is intentionally minimal and stays focused on simulation and training only.
- No rendering or plotting occurs in the training process
- Telemetry is published asynchronously via a ZeroMQ PUB socket
- Visualization, plotting, and event correlation are handled by a separate client (TUI)
This keeps the hot path free of UI and analysis overhead, allowing the simulation to run at full speed.
Result
- High episode throughput on CPU-only systems
- Stable real-time telemetry without blocking the simulation
- Fast iteration cycles with immediate observability
AI Hydra achieves speed not through hardware, but through alignment and separation of concerns. The system is optimized so that the cost of learning is dominated by model computation, not data movement or orchestration.
Snapshot Report
The TUI includes a Snapshot feature that captures:
- Configuration
- Model parameters
- Replay memory state
- Event log
- Performance metrics
Snapshots are saved to a AI-Hydra directory that the system creates in the user's home directory.
Example:
📸 AI Hydra - Snapshot Report
════════════════════════════
Timestamp : 2026-04-05 12:00:13
Simulation Run Time : 1h 17m
Current Episode Number : 5449
AI Hydra Version : v0.25.2
Random Seed : 1970
🎯 Epsilon Greedy
════════════════
Initial Epsilon : 0.999
Minimum Epsilon : 0.0
Epsilon Decay Rate : 0.98
🧠 GRU Model
═══════════
Input Size : 23
Hidden Size : 224
Dropout Layer P-Value : 0.1
Layers : 3
Learning Rate : 0.0005
Discount/Gamma : 0.97
Tau : 0.001
💰 Rewards
═════════
Food Reward : 10.0
Collision Penalty : -10.0
Max Moves Penalty : 0.0
Empty Move Reward : 0.0
Closer to Food : 0.0
Further from Food : 0.0
Max Moves Multiplier : 150
💾 Replay Memory
═══════════════
Max Frames : 125000
Memory Buckets : 20
Max Training Frames : 512
Highest Gear : 26
Cooldown Threshold : 100
Upshift Threshold : 150
Downshift Threshold : 50
Stagnant Threshold : 300
Critical Stagnant Threshold : 500
🎲 Monte Carlo Tree Search
═════════════════════════
Gating P-Value : 0.005
Search Depth : 10
Iterations : 100
Exploration P-Value : 0.9
Score Threshold : 40
Steps : 20
📚 Event Log Messages
════════════════════
- 0s 💻 Hydra Client 🔵 Initialized...
- 0s ⚡ Simulation 🔵 Connected to simulation server
- 0s ⚡ Simulation 🔵 Simulation started
100 24s 🏁 ATH Gearbox 🟢 Shifting UP: 1 > 2 - 6/85
201 1m 2s 🏁 ATH Gearbox 🟢 Shifting UP: 2 > 3 - 8/64
302 2m 0s 🏁 ATH Gearbox 🟢 Shifting UP: 3 > 4 - 10/51
342 2m 26s 🧭 Epsilon 🔵 Exploration complete: ε = 0.0
403 3m 24s 🏁 ATH Gearbox 🟢 Shifting UP: 4 > 5 - 12/42
420 3m 39s 💾 ATH Data Mgr 🔵 Memory is full (125000), pruning initiated
504 5m 4s 🏁 ATH Gearbox 🟢 Shifting UP: 5 > 6 - 14/36
604 6m 44s 🏁 ATH Gearbox 🟢 Shifting UP: 6 > 7 - 16/32
656 7m 44s 💪 Train Manager 🟡 Stagnation alert raised
656 7m 44s 🙂 Nice Policy 🔵 Enabling EpsilonNice
706 8m 34s 🏁 ATH Gearbox 🟢 Shifting UP: 7 > 8 - 18/28
807 10m 16s 🏁 ATH Gearbox 🟢 Shifting UP: 8 > 9 - 20/25
856 11m 6s 💪 Train Manager 🔴 Critical stagnation alert(1). New threshold set: 1000
856 11m 6s 🏁 ATH Gearbox 🔴 Critical Stagnation alert(1): Radical DOWN shift: 9 > 1 - 4/128
884 11m 33s 💪 Train Manager 🔵 Stagnation alert cleared (new highscore: 14)
884 11m 33s 🙂 Nice Policy 🔵 Disabling EpsilonNice
956 12m 56s 🏁 ATH Gearbox 🟢 Shifting UP: 1 > 2 - 6/85
1057 14m 54s 🏁 ATH Gearbox 🟢 Shifting UP: 2 > 3 - 8/64
1158 16m 38s 🏁 ATH Gearbox 🟢 Shifting UP: 3 > 4 - 10/51
1259 18m 25s 🏁 ATH Gearbox 🟢 Shifting UP: 4 > 5 - 12/42
1261 18m 26s 💪 Train Manager 🟡 Stagnation alert raised
1261 18m 26s 🙂 Nice Policy 🔵 Enabling EpsilonNice
1360 20m 7s 🏁 ATH Gearbox 🟢 Shifting UP: 5 > 6 - 14/36
1461 21m 39s 🏁 ATH Gearbox 🟢 Shifting UP: 6 > 7 - 16/32
1562 23m 8s 🏁 ATH Gearbox 🟢 Shifting UP: 7 > 8 - 18/28
1662 24m 54s 🏁 ATH Gearbox 🟢 Shifting UP: 8 > 9 - 20/25
1764 26m 29s 🏁 ATH Gearbox 🟢 Shifting UP: 9 > 10 - 22/23
1865 28m 4s 🏁 ATH Gearbox 🟢 Shifting UP: 10 > 11 - 24/21
1911 28m 49s 💪 Train Manager 🔵 Stagnation alert cleared (new highscore: 18)
1911 28m 49s 🙂 Nice Policy 🔵 Disabling EpsilonNice
1966 29m 57s 🏁 ATH Gearbox 🟢 Shifting UP: 11 > 12 - 26/19
2067 31m 57s 🏁 ATH Gearbox 🟢 Shifting UP: 12 > 13 - 28/18
2168 33m 57s 🏁 ATH Gearbox 🟢 Shifting UP: 13 > 14 - 30/17
🏆 Highscore Events
══════════════════
Epoch Highscore Time Epsilon
═════ ═════════ ═══════ ═══════
0 0 0s 0.9900
1 1 0s 0.9990
93 2 21s 0.1557
118 3 30s 0.0921
218 4 1m 11s 0.0122
218 5 1m 11s 0.0122
326 6 2m 14s 0.0014
326 7 2m 14s 0.0014
353 8 2m 36s 0.0000
353 9 2m 36s 0.0000
353 10 2m 36s 0.0000
356 11 2m 38s 0.0000
356 12 2m 38s 0.0000
356 13 2m 38s 0.0000
884 14 11m 33s 0.0000
961 15 13m 2s 0.0000
961 16 13m 2s 0.0000
961 17 13m 2s 0.0000
1911 18 28m 49s 0.0000
1914 19 28m 53s 0.0000
1914 20 28m 53s 0.0000
1914 21 28m 53s 0.0000
1914 22 28m 53s 0.0000
1914 23 28m 53s 0.0000
1914 24 28m 53s 0.0000
1914 25 28m 53s 0.0000
1914 26 28m 53s 0.0000
🙂 Epsilon Nice
══════════════
P-Value : 0.005
Nice Steps : 20
🙂 Epsilon Nice Events
═════════════════════
Window Epoch Calls Triggered Fatal Suggested Overrides No Safe Alt Trigger Rate Override Rate
═════════ ═════ ═════ ═════════ ═══════════════ ═════════ ═══════════ ════════════ ═════════════
1-100 100 0 0 0 0 0 0.0000 0.0000
101-200 200 0 0 0 0 0 0.0000 0.0000
201-300 300 0 0 0 0 0 0.0000 0.0000
301-400 400 0 0 0 0 0 0.0000 0.0000
401-500 500 0 0 0 0 0 0.0000 0.0000
501-600 600 0 0 0 0 0 0.0000 0.0000
601-700 700 27186 2480 1 2353 127 0.0912 0.0866
701-800 800 63755 5620 7 5397 223 0.0882 0.0847
801-900 900 54906 5360 6 5131 229 0.0976 0.0935
901-1000 1000 0 0 0 0 0 0.0000 0.0000
1001-1100 1100 0 0 0 0 0 0.0000 0.0000
1101-1200 1200 0 0 0 0 0 0.0000 0.0000
1201-1300 1300 22060 1840 4 1774 66 0.0834 0.0804
1301-1400 1400 64134 5900 2 5630 270 0.0920 0.0878
1401-1500 1500 52335 4800 2 4612 188 0.0917 0.0881
1501-1600 1600 63740 5860 0 5591 269 0.0919 0.0877
1601-1700 1700 64478 5660 0 5362 298 0.0878 0.0832
1701-1800 1800 62157 5540 1 5248 292 0.0891 0.0844
1801-1900 1900 60779 5211 1 4919 292 0.0857 0.0809
1901-2000 2000 5620 609 0 587 22 0.1084 0.1044
2001-2100 2100 0 0 0 0 0 0.0000 0.0000
2101-2200 2200 0 0 0 0 0 0.0000 0.0000
🎲 Monte Carlo Tree Search Events
════════════════════════════════
Window Calls Triggered Trigger Rate
═════════ ═════ ═════════ ════════════
1-100 11492 0 0.0000
101-200 17179 0 0.0000
201-300 31776 0 0.0000
301-400 51512 0 0.0000
401-500 68785 0 0.0000
501-600 66006 0 0.0000
601-700 73588 0 0.0000
701-800 63755 0 0.0000
801-900 68050 0 0.0000
901-1000 83468 0 0.0000
1001-1100 70904 0 0.0000
1101-1200 66845 0 0.0000
1201-1300 66127 0 0.0000
1301-1400 64134 0 0.0000
1401-1500 52335 0 0.0000
1501-1600 63740 0 0.0000
1601-1700 64478 0 0.0000
1701-1800 62157 0 0.0000
1801-1900 60779 0 0.0000
1901-2000 75966 0 0.0000
2001-2100 81013 0 0.0000
2101-2200 86708 0 0.0000
⚙️ ATH Shift / Mean / Median
═════════════════════════════
Epoch Gear Seq Length Batch Size Mean Median Recent Mean Recent Median
═════ ════ ══════════ ══════════ ════ ══════ ═══════════ ═════════════
100 2 6 85 0.30 0.00 0.30 0.00
200 2 6 85 0.55 0.00 0.55 0.00
300 3 8 64 0.91 1.00 0.91 1.00
400 4 10 51 1.59 1.00 1.59 1.00
500 5 12 42 2.12 1.00 2.12 1.00
600 6 14 36 2.51 2.00 2.95 3.00
700 7 16 32 2.80 3.00 3.70 4.00
800 8 18 28 2.99 3.00 4.24 5.00
900 1 4 128 3.23 3.00 4.53 5.00
1000 2 6 85 3.42 3.00 4.73 5.00
1100 3 8 64 3.48 3.00 4.64 5.00
1200 4 10 51 3.50 3.00 4.49 5.00
1300 5 12 42 3.58 3.00 4.54 5.00
1400 6 14 36 3.66 4.00 4.44 5.00
1500 7 16 32 3.73 4.00 4.34 4.00
1600 8 18 28 3.83 4.00 4.61 5.00
1700 9 20 25 3.90 4.00 4.85 5.00
1800 10 22 23 3.98 4.00 5.00 5.00
1900 11 24 21 4.11 4.00 5.37 5.00
2000 12 26 19 4.33 5.00 6.13 6.00
2100 13 28 18 4.54 5.00 6.82 7.00
2200 14 30 17 4.67 5.00 7.31 7.00
🪣 ATH Memory Bucket Usage
═════════════════════════
Epoch Gear b2 b3 b4 b5 b6 b7 b8 b9 b10 b11 b12 b13 b14 b15 b16 b17 b18 b19 b20 b21
═════ ════ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══ ═══
100 2 108 108 107 106 100 92 82 74 69 67 64 61 57 54 53 48 47 40 34 32
200 3 208 206 203 188 172 157 145 140 132 119 115 107 103 95 88 85 79 74 71 68
300 4 308 304 296 270 246 235 219 200 191 182 169 160 152 145 141 136 132 120 115 108
400 5 406 403 381 350 334 316 297 283 267 257 247 237 231 227 212 200 194 185 177 172
500 6 202 202 201 201 201 201 200 196 195 191 191 189 185 182 179 178 176 174 170 167
600 7 183 183 183 181 181 179 177 174 173 171 169 168 165 162 160 159 155 149 143 141
700 8 178 178 177 176 174 173 170 167 165 162 162 157 153 152 148 144 140 139 134 133
800 9 186 186 186 186 184 182 178 175 174 174 170 170 168 167 167 163 157 154 152 148
900 1 189 189 189 189 189 189 189 189 189 188 188 188 188 188 188 188 188 188 188 188
1000 2 156 156 156 156 156 156 156 156 156 156 156 156 156 156 156 156 156 156 156 156
1100 3 163 163 163 163 163 163 162 162 161 161 161 161 161 161 160 160 160 159 159 159
1200 4 179 179 179 178 178 178 177 177 177 176 176 173 172 172 171 171 169 168 168 164
1300 5 182 182 181 180 180 178 178 177 176 175 173 172 169 168 166 166 162 161 159 158
1400 6 192 192 191 191 190 190 188 183 181 180 178 175 174 173 170 168 166 164 162 161
1500 7 214 214 214 214 214 211 205 203 201 199 195 194 187 184 180 176 173 166 158 157
1600 8 211 211 211 211 209 206 205 204 202 200 196 191 187 182 177 170 164 159 151 147
1700 9 190 190 190 188 188 188 188 185 184 183 180 175 170 168 164 158 149 147 145 144
1800 10 202 202 201 200 198 196 194 192 189 184 179 176 172 167 160 154 152 147 142 135
1900 11 204 202 201 201 198 194 194 192 186 181 180 177 168 166 163 160 151 144 119 116
2000 12 172 170 169 169 167 165 163 160 157 155 153 148 142 140 139 134 129 114 111 108
2100 13 158 157 156 155 153 152 152 150 148 143 140 132 130 130 126 124 108 105 101 98
2200 14 148 148 148 147 145 145 143 139 139 135 132 127 123 120 117 110 105 102 98 96
Closing Thought
AI Hydra is not just a simulation engine — it is a learning ecosystem.
Its components — adaptive replay memory, dynamic policy layers, and real-time orchestration — do not operate in isolation. They interact.
- The gearbox reshapes temporal learning
- The policy adapts under changing constraints
- Recovery mechanisms respond to stagnation signals
Together, they form a system where behavior is not explicitly programmed, but emerges from the interaction of these parts.
The result is a tightly coupled environment where:
- learning dynamics are visible
- iteration is fast
- and meaningful behavior can emerge from system-level feedback
AI Hydra is not just running games.
It is evolving behavior.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file ai_hydra-0.27.0.tar.gz.
File metadata
- Download URL: ai_hydra-0.27.0.tar.gz
- Upload date:
- Size: 123.0 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/2.3.3 CPython/3.11.15 Linux/6.17.0-1010-azure
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
1fcaec7a12a101563f7cf338aec9e73b9cebdf903172af978d06d3497b77ddb0
|
|
| MD5 |
70c22e64c9678671cc28d5224ebc829d
|
|
| BLAKE2b-256 |
af842375b3c7e170cfdc810d045406ce8295ac4b6df89d692e6373c0ae6ebe58
|
File details
Details for the file ai_hydra-0.27.0-py3-none-any.whl.
File metadata
- Download URL: ai_hydra-0.27.0-py3-none-any.whl
- Upload date:
- Size: 154.0 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: poetry/2.3.3 CPython/3.11.15 Linux/6.17.0-1010-azure
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
3cfe7676fd3ddc81d9d03dee2a15d117fa7e8a8f6fbe9f723d2631908f138550
|
|
| MD5 |
0bad608f91297be1778db2c81a8058c8
|
|
| BLAKE2b-256 |
3135cbe4e92bb05fabbc480b8c90a0643f496fc05c32781dbfb4fad6a1035f78
|







