Software for monitoring and analyzing AIS in TAK.
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers

Project description
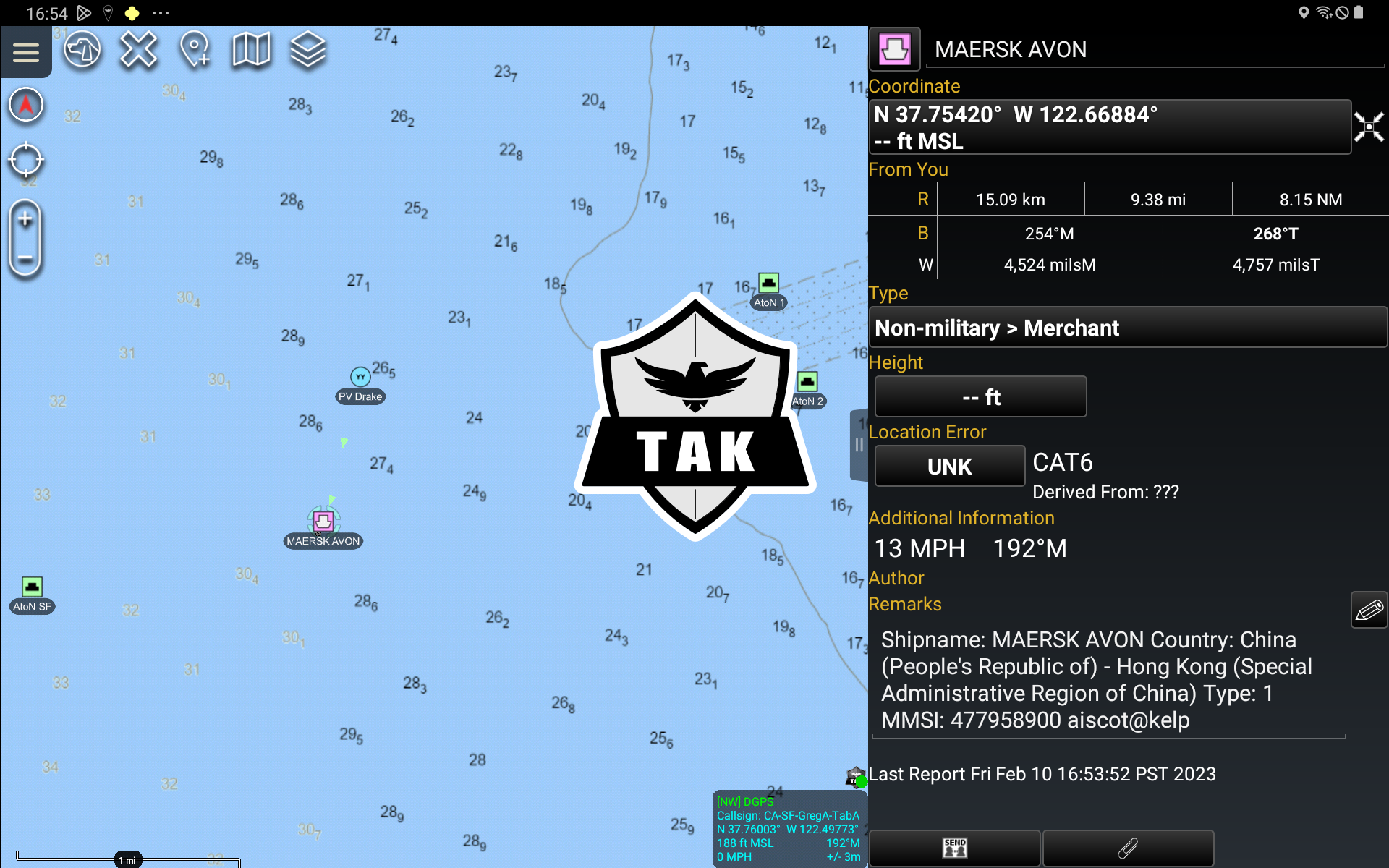
AIS to TAK Gateway - Maritime Domain Awareness for Public Safety & Defense
AISCOT provides critical maritime domain awareness by streaming real-time vessel tracking data directly into Team Awareness Kit (TAK) platforms. This solution enables public safety professionals to monitor maritime activities with comprehensive situational awareness through native TAK integration.
Key Capabilities
- Real-time Maritime Tracking: Continuous AIS data capture and reporting for immediate threat assessment
- Native TAK Integration: Seamless compatibility with ATAK, WinTAK, iTAK, TAK Server & TAKX using Cursor on Target (CoT) protocols
- Multi-source Data Fusion: Support for RF AIS transmissions, local NMEA feeds, and Internet-based AIS aggregators
- Comprehensive Vessel Intelligence: Display vessel icons, attitude, type, track history, bearing, speed, callsign, and maritime identifiers
- Government Data Access: Integration with US Department of Transportation SeaVision for enhanced coverage
Use Cases
- Port Security: Monitor vessel approaches and harbor activities
- Border Protection: Track maritime border crossings and suspicious activities
- Search & Rescue: Coordinate response efforts with real-time vessel positions
- Intelligence Operations: Analyze maritime patterns and vessel behaviors
Documentation
Complete AISCOT documentation and deployment guides
License & Copyright
Copyright Sensors & Signals LLC https://www.snstac.com
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
- pyAISm.py is licensed under the MIT License. See aiscot/pyAISm.py for details.
Project details
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file aiscot-7.1.3.tar.gz.
File metadata
- Download URL: aiscot-7.1.3.tar.gz
- Upload date:
- Size: 774.0 kB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.7
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
501cb349224f71d818af41bb59dd5dbf46965bb2b67d6854f8da9bfabf9e8581
|
|
| MD5 |
64d5a30c0e21ad4096b2b32e24b51e02
|
|
| BLAKE2b-256 |
24f8210663b0732176a979edc29dd31162ccb8f921b8a282cde011fc58e0a8ee
|
Provenance
The following attestation bundles were made for aiscot-7.1.3.tar.gz:
Publisher:
python-publish_to_pypi.yml on snstac/aiscot
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
aiscot-7.1.3.tar.gz -
Subject digest:
501cb349224f71d818af41bb59dd5dbf46965bb2b67d6854f8da9bfabf9e8581 - Sigstore transparency entry: 813593430
- Sigstore integration time:
-
Permalink:
snstac/aiscot@28c078668f3b163706dff8c007345e8225d4af7e -
Branch / Tag:
refs/tags/v7.1.3 - Owner: https://github.com/snstac
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
python-publish_to_pypi.yml@28c078668f3b163706dff8c007345e8225d4af7e -
Trigger Event:
push
-
Statement type:
File details
Details for the file aiscot-7.1.3-py3-none-any.whl.
File metadata
- Download URL: aiscot-7.1.3-py3-none-any.whl
- Upload date:
- Size: 776.5 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.7
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
62145c34a12d2e5d6145def91b9f4615257edb8a4c55d635f90a4018fc47ee61
|
|
| MD5 |
534da6fdee9901db4aee1c26f5997190
|
|
| BLAKE2b-256 |
cc071adec9ae445959146cb2884982605eff7f6894d2477859d8b56190f7b74f
|
Provenance
The following attestation bundles were made for aiscot-7.1.3-py3-none-any.whl:
Publisher:
python-publish_to_pypi.yml on snstac/aiscot
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
aiscot-7.1.3-py3-none-any.whl -
Subject digest:
62145c34a12d2e5d6145def91b9f4615257edb8a4c55d635f90a4018fc47ee61 - Sigstore transparency entry: 813593432
- Sigstore integration time:
-
Permalink:
snstac/aiscot@28c078668f3b163706dff8c007345e8225d4af7e -
Branch / Tag:
refs/tags/v7.1.3 - Owner: https://github.com/snstac
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
python-publish_to_pypi.yml@28c078668f3b163706dff8c007345e8225d4af7e -
Trigger Event:
push
-
Statement type:







