URDF Files for Humanoid Robots of the ARMAR Family

Project description
URDF Files for Humanoid Robots of the ARMAR Family
This repository provides (unofficial) URDF files for some of the humanoid robots of the ARMAR family.
Supported Robots
As of now, the following robots are supported:
| robot_name | DOF | Description | |
|---|---|---|---|
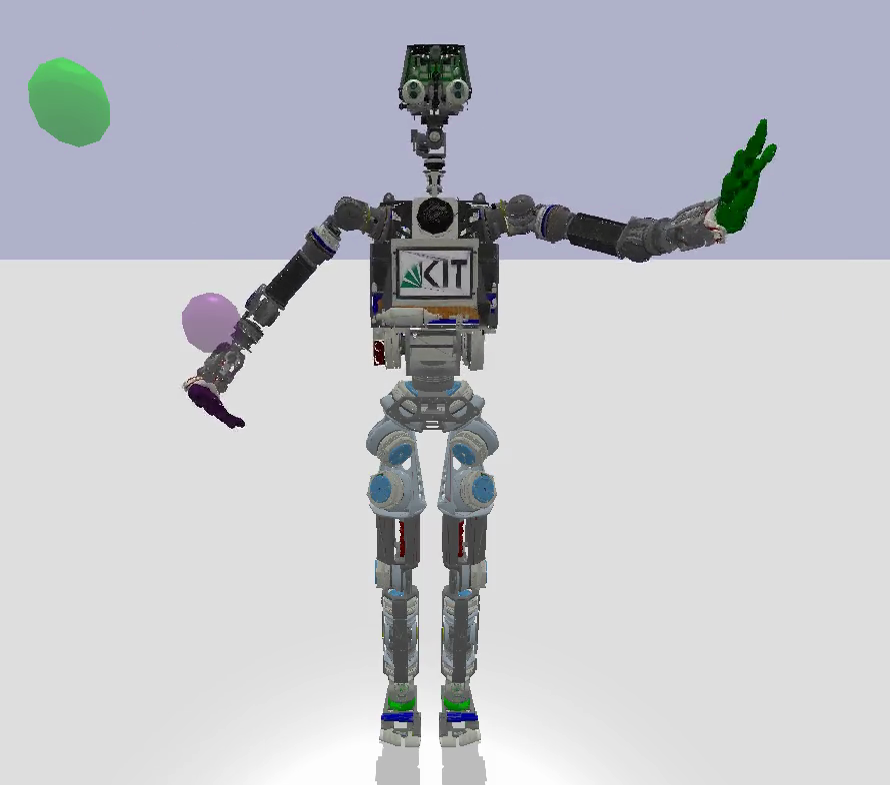 |
armar4 | 52 | The humanoid robot Armar 4 with a fixed head. |
| armar4_fixed_hands | 30 | Like armar4, but with rigid hands. | |
| armar4_fixed_hands_and_legs | 18 | Like armar4, but with rigid hands and fixed legs. | |
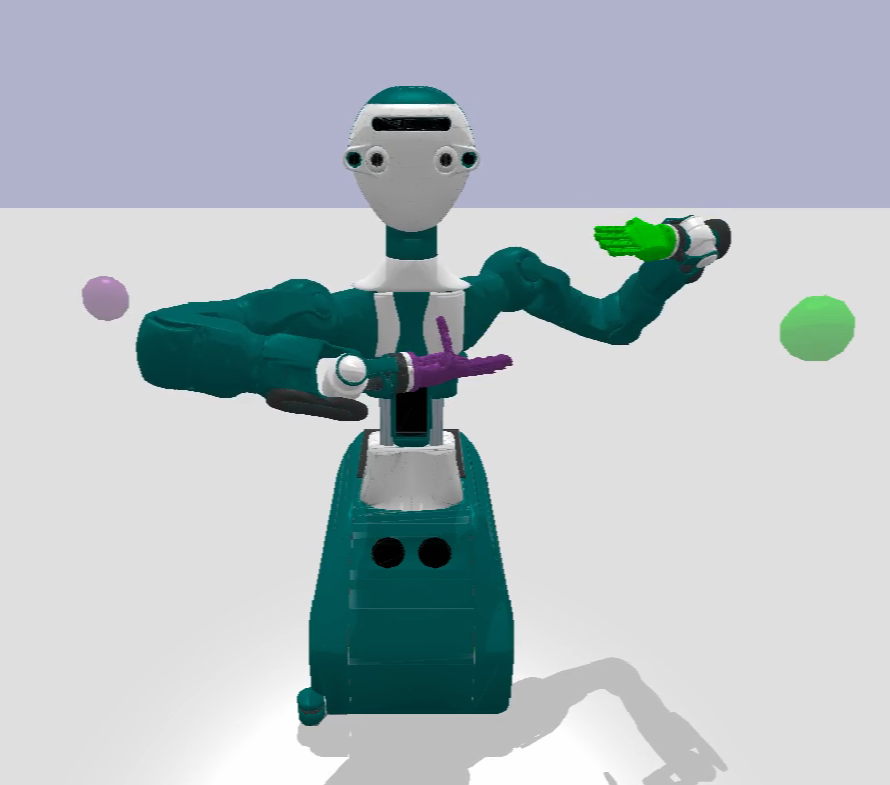 |
armar6 | 17 | The humanoid robot Armar 6 with a fixed head and rigid hands. |
| armar6_front | 17 | Like armar6, but the position of continuous joints is restricted such that the hands are mostly in front of the robot. | |
 |
armar6_x4 | 33 | A four-armed version of Armar 6 with a fixed head and rigid hands. |
| armar6_x4_front | 33 | Like armar6_x4, but the position of continuous joints is restricted such that the hands are mostly in front of the robot. |
The corresponding URDF files can be found in the description directory. As shown below, it is also possible to access the models directly from python.
Installation
pip install armar
Usage
The following example shows how to receive the absolute path of a URDF file from python:
import armar
armar.get_path_to_urdf_file(robot_name="armar6")
Example: Models controlled by a Neural Network
Acknowledgment and Disclaimer
The robots of the ARMAR family are designed and developed by the Chair of High Performance Humanoid Technologies (H²T) at the Karlsruhe Institute of Technology (KIT). The URDF files provided in this repository are based on models provided by the Chair of High Performance Humanoid Technologies. The four-armed version of Armar 6 is not an official part of the ARMAR family developed at H²T.
License
The files of this repository are licensed under the Creative Commons Attribution-NonCommercial 4.0 International (CC BY-NC 4.0) license.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distributions
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file armar-1.1.0-py3-none-any.whl.
File metadata
- Download URL: armar-1.1.0-py3-none-any.whl
- Upload date:
- Size: 57.5 MB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.4.1 importlib_metadata/3.10.0 pkginfo/1.7.0 requests/2.25.1 requests-toolbelt/0.9.1 tqdm/4.59.0 CPython/3.8.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
78ba2c9dfa22dc11e116d76753b265e99428b3bd0aad88de9f7dcf1b5d2f6aea
|
|
| MD5 |
6e732ddee808e4c1a77f49231672cbcd
|
|
| BLAKE2b-256 |
36763bff68bc7c90c93105116d639dde95dfcfb6b998261457e7e158df73e6e5
|







