The framework for algorithms engineering with Python.

Project description

Tsipor Dynamics
Algorithms Engineering and Development
C4Dynamics (read Tsipor (bird) Dynamics) is the open-source framework of algorithms development for motion estimation and control.

Complete Documentation: https://c4dynamics.github.io/C4dynamics/
Table of contents
Motivation
C4dynamics provides two basic entities for developing and analyzing algorithms of objects in space and time:
-
datapoint: a class defining a point in space: position, velocity, acceleration, and mass.
-
rigidbody: a class defining a rigid body in space, i.e. an object with length and angular position.
You can develop and analyze algorithms by operating on these objects with one of the internal systems or algorithms of C4dynamics:
-
ODE Solver (4th order Runge-Kutta)
-
Kalman Filter
-
Extended Kalman Filter
-
Luenberger Observer
-
Radar System
-
Altitude Radar
-
IMU Model
-
GPS Model
-
Line Of Sight Seeker
Or one of the 3rd party libraries integrated with C4dynamics:
-
NumPy
-
Matplotlib
-
OpenCV
-
YOLO
Whether you're a seasoned algorithm engineer or just getting started, this framework has something to offer. Its modular design allows you to easily pick and choose the components you need, and its active community of contributors is always working to improve and expand its capabilities.
So why wait? Start using C4dynamics today and take your algorithms engineering to the next level!
Installation
- PIP
pip install c4dynamics
- GitHub
To run the latest GitHub version, download c4dynamics:
https://github.com/C4dynamics/C4dynamics
Note:
*If you face issues while cloning C4dynamics or using the YOLO detector,
it is likely that the yolov3.weights file has not been downloaded correctly.
To resolve this, download and install Git LFS and then reinstall C4dynamics.*
Install the required packages:
pip install -r requirements.txt
- Conda
Alternatively, run the preinstalled conda environment (see conda_installation.md):
conda env create -f c4dynamics_env.yaml
Quickstart
Import the framework:
import c4dynamics as c4d
Define a point in space with some initial conditions:
pt = c4d.datapoint(x = 1000, vx = 100)
Define a body in space with some initial conditions:
body = c4d.rigidbody(theta = 15 * 3.14 / 180)
Load an object detection module (YOLO):
yolodet = c4d.detectors.yolo(height = height, width = width)
Define a linear Kalman Filter, perform a prediction and an update:
pt.filter = c4d.filters.kalman(np.hstack((z, np.zeros(2))), P, A, H, Q, R)
pt.filter.predict()
pt.filter.correct(measure)
Store the current state of the datapoint (at time t):
pt.store(t)
Store other variables added to the datapoint object:
pt.storevar('kalman_state', t)
Define errors to a general-purpose seeker with C4dynamics:
rdr = c4d.seekers.radar(sf = 0.9, bias = 0, noisestd = 1)
Architecture
For Architecture & Roadmap, see the Wiki page.
Contributors ✨




This project follows the all-contributors specification. Contributions of any kind welcome!
Quickstart for Contributors
-
See the page contributing.md
-
In any case, it's a good advise to start with the example dof6sim.ipynb and change the missile-target conditions to gain some experience with the framework. This example appears also down here in the README
Getting Started
See all the examples at: https://github.com/C4dynamics/C4dynamics/tree/main/examples
Complete explanation at the README in the examples folder.
Example 1 - Objects Detection and Tracking
-
https://github.com/C4dynamics/C4dynamics/blob/main/examples/detect_track.ipynb
-
Detecting objects using the YOLOv3 model, updating and predicting their trajectories with the Kalman filter employing linear dynamics. Association between tracks is performed using scikit-learn's k-neighbors.
-
Each track is represented as a C4dynamics-datapoint, and the update and prediction are executed with the internal C4dynamics-Kalman-filter.
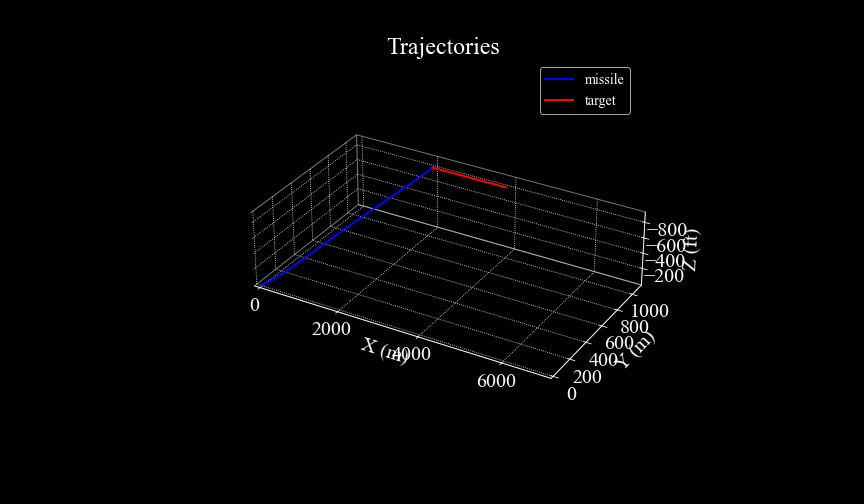
Example 2 - Six Degrees of Freedom Simulation
-
https://github.com/C4dynamics/C4dynamics/blob/main/examples/dof6sim.ipynb
-
6 DOF simulation of a missile employing proportional navigation guidance to pursue a target Conducting a 6-degree-of-freedom (6 DOF) simulation of a missile utilizing proportional navigation guidance to pursue a target.
-
The target is represented by a C4Dynamics-datapoint, i.e. an object with translational motion. The missile is modeled as a C4Dynamics-rigidbody object, with variables representing both translational and rotational motion.
For this example, additional systems and sensors (not part of C4dynamics but available for download from the examples folder) were developed:
Control system
Engine
Aerodynamics
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file c4dynamics-1.2.0.tar.gz.
File metadata
- Download URL: c4dynamics-1.2.0.tar.gz
- Upload date:
- Size: 230.6 MB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.2 CPython/3.10.1
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
f7048fa00c87cf2c05b968c77119b1eb7f1d526b67842f517ef1dc6e18adad2b
|
|
| MD5 |
f0bb7e4834bab3f2d08db429d17a2459
|
|
| BLAKE2b-256 |
17757d6416b4a02d4fe9daacef9f589d6fff4130893071a386adffe0dde9a74e
|
File details
Details for the file c4dynamics-1.2.0-py3-none-any.whl.
File metadata
- Download URL: c4dynamics-1.2.0-py3-none-any.whl
- Upload date:
- Size: 230.6 MB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.2 CPython/3.10.1
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
b2731bf1525b63bf4e179a626bc4c682dad510038a896b4f82d104b292d77139
|
|
| MD5 |
8207586421aabec402b62046fa4159a3
|
|
| BLAKE2b-256 |
d9f7a2c2b5e94e7789ca02ec61557512fedc93753590871280522cb35353a794
|







