Durable MCP control plane for long-running Codex Desktop tasks.
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers

Project description
Codex Control Plane MCP
English | Русский





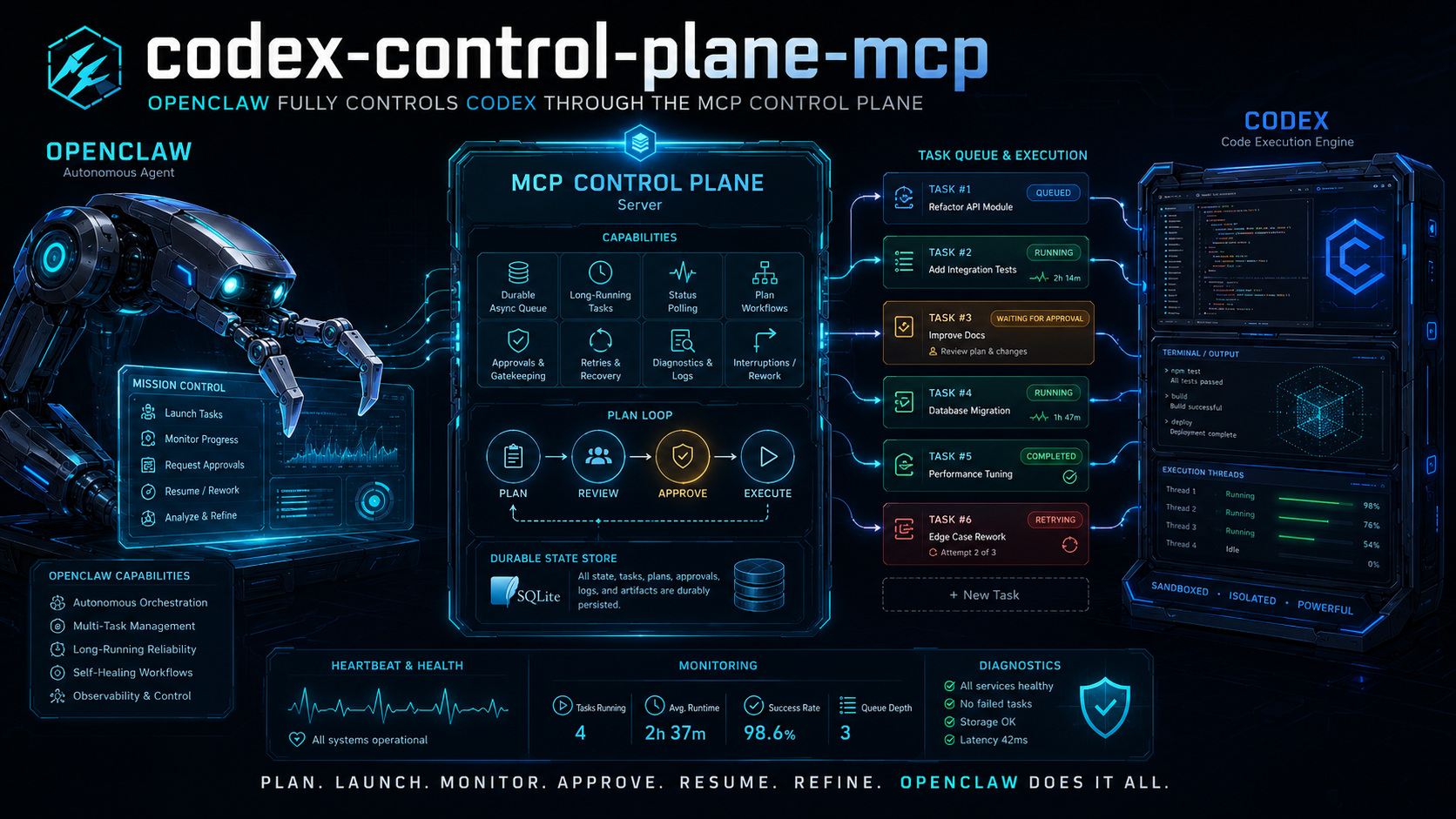
Reliable Codex Desktop automation for long tasks.
codex-control-plane-mcp turns Codex Desktop and codex-app-server into a
durable worker that an MCP client can drive safely. Send a task, get an
operationId or workflowId right away, poll until the work finishes, approve
Plan Mode when needed, then read the final report.
The server handles the awkward parts that thin wrappers usually leave to the caller: app-server startup, thread and turn creation, retry safety, duplicate prompt protection, Plan Mode, approvals, local history, diagnostics, and repair.
OpenClaw and Hermes are first-class clients, but the server is useful for any local orchestrator that needs Codex Desktop to do long-running work without holding one MCP call open for hours.
The short version
MCP client / orchestrator
-> submit a task or start a Plan Mode workflow
<- receive operationId or workflowId immediately
-> poll status
-> answer approvals or approve the plan
<- read final report, diagnostics, threadId, and turnId
That gives you a simple contract:
- no multi-hour MCP calls;
- no duplicate Codex turns after a client retry;
- no blind fire-and-forget task submission;
- a local SQLite record of operations, workflows, turns, hooks, and diagnostics.
Why not just call Codex directly?
| Capability | Thin Codex wrapper | Codex Control Plane MCP |
|---|---|---|
| Multi-hour tasks | blocking / fragile | durable async operation |
| Client timeout recovery | manual | retry-safe client_request_id |
| Duplicate turn protection | no | active prompt detection |
| Plan Mode workflow | human / manual | pollable workflow state |
| Approvals and questions | blocking / opaque | pending interactions API |
| Restart recovery | ad hoc | persisted operation state |
| Diagnostics | logs only | health, diagnostics, repair tools |
Current support
- Full live target: Windows with Codex Desktop and
codex-app-server. - Linux and macOS: protocol-only checks for now.
- Local-first: not intended to be exposed as a public network service.
Security model
This is a local-first control plane for trusted Codex Desktop environments.
Do not expose it as a network service without authentication.
Recommended first-run posture:
- use
read-onlyfor untrusted repositories; - use
on-requestapproval when testing new workflows; - keep
state/,logs/,.env, and.codex/private.
What it does
- Durable async queue for Codex write operations.
- Retry-safe
client_request_idhandling. - Active duplicate prompt detection.
- SQLite leases and heartbeats for competing MCP processes.
- Recovery after MCP restart during
thread/startorturn/start. - Plan Mode workflows: start plan, poll, approve, execute, read final report.
- Pending approvals and questions exposed as pollable MCP state.
- Turn interrupts by
threadId/turnId,operationId, orworkflowId. - Health checks, diagnostics, issue analysis, and dry-run repairs.
- MCP-owned hook history in SQLite for search, summaries, and fallback reads.
- Structured MCP errors that automation code can branch on.
Write and control actions go through codex-app-server. The server does not
mutate Codex internal SQLite databases or transcript files.
Install
Recommended:
pipx install codex-control-plane-mcp
Or run directly:
uvx codex-control-plane-mcp
From GitHub:
python -m pip install "codex-control-plane-mcp @ git+https://github.com/aresyn/codex-control-plane-mcp.git"
For local development:
git clone https://github.com/aresyn/codex-control-plane-mcp.git
cd codex-control-plane-mcp
py -m venv .venv
.\.venv\Scripts\Activate.ps1
python -m pip install -e ".[dev]"
python -m pytest -q
MCP client config
After installation, generate a config:
codex-control-plane-mcp-admin init --state-db .\state\codex-mcp-state.sqlite3 --projects-root C:\Users\you\Projects
Minimal stdio entry:
{
"mcpServers": {
"codex-control-plane": {
"command": "codex-control-plane-mcp",
"args": []
}
}
}
Run the MCP stdio server:
codex-control-plane-mcp
Or run it as a module:
py -m codex_control_plane_mcp.server
The old openclaw-codex-mcp and openclaw-codex-mcp-hooks commands remain as
compatibility aliases for one release line.
First setup
The admin helper can generate a fuller client config, install hooks, and run a protocol smoke:
codex-control-plane-mcp-admin init --state-db .\state\codex-mcp-state.sqlite3 --projects-root C:\Users\you\Projects
The command prints a JSON block you can copy into an MCP client config. It does not print secrets or private prompts.
You can also install only the Codex hooks:
codex-control-plane-mcp-hooks install --state-db .\state\codex-mcp-state.sqlite3
codex-control-plane-mcp-hooks status
codex-control-plane-mcp-hooks doctor
The installer backs up ~/.codex/hooks.json, merges its handlers with your
existing hooks, stores stateDb as an absolute path, and writes prompts, visible
agent progress text, final answers, and turn status into the MCP state DB. Tool
calls and command outputs are not recorded by default. Restart Codex after
installing or changing hooks.
For turns launched through codex-app-server, the server mirrors the accepted
prompt, visible assistant messages, and turn status into the same SQLite
history. That keeps search and status reads useful even when app-server does not
execute user hooks itself.
Main workflows
Submit a durable task:
codex_submit_task
-> operationId
codex_get_operation_status(operationId)
-> queued / running / waiting_for_approval / completed / failed
Use the same client_request_id when a caller retries after a transport timeout.
The retry returns the existing operation instead of creating another turn.
Drive Plan Mode:
codex_start_plan_workflow
-> workflowId
codex_get_workflow_status(workflowId)
-> wait_plan / review_plan / execute_plan
codex_approve_plan(workflowId)
-> executionOperationId
codex_get_workflow_status(workflowId)
-> finalReport
Handle approvals and questions:
codex_list_pending_interactions
codex_answer_pending_interaction
Start diagnostics with:
codex_health_summary
codex_collect_diagnostics
codex_analyze_issue
codex_repair_issue
Repair actions default to dry_run=true.
Tool surface
Stable orchestration tools:
codex_submit_taskcodex_get_operation_statuscodex_start_plan_workflowcodex_get_workflow_statuscodex_approve_plancodex_list_pending_interactionscodex_answer_pending_interactioncodex_interrupt_turncodex_health_summarycodex_collect_diagnosticscodex_repair_issue
Compatibility and read tools:
codex_start_chatcodex_send_messagecodex_execute_plancodex_list_projectscodex_list_project_chatscodex_list_active_chatscodex_search_chatscodex_get_chat_statuscodex_get_chatcodex_get_turn_statuscodex_restart_app_servercodex_get_app_server_statuscodex_get_diagnostic_logscodex_analyze_issue
New clients should use durable operations and workflows. Low-level write tools stay available for compatibility.
See docs/API_CONTRACT.md for schemas, error shape, stable tool groups, and versioning rules.
Result contract
Every tool declares an outputSchema and returns MCP structuredContent.
Success:
{"ok": true}
Domain or tool error:
{
"ok": false,
"error": {
"code": "CODEX_ERROR_CODE",
"message": "Human readable message",
"details": {},
"retryable": false
}
}
Call codex_health_summary on startup and reconnect. The version block
contains serverName, serverVersion, contractVersion, toolSurfaceHash,
and stable/compatibility tool lists.
Configuration
Configuration can come from environment variables or from a JSON file referenced
by CODEX_CONTROL_PLANE_MCP_CONFIG. The old OPENCLAW_CODEX_MCP_CONFIG name is
still accepted as a fallback.
Common variables:
CODEX_HOME: Codex home directory. Defaults to%USERPROFILE%\.codex.CODEX_PROJECTS_ROOT: project root scanned by catalog and read tools.CODEX_ALLOWED_ROOTS: semicolon-separated path allowlist.CODEX_PROJECTS_REGISTRY: optional JSON project registry.CODEX_MCP_STATE_DB: local MCP state DB.CODEX_CONTROL_PLANE_MCP_LOG: log file path.CODEX_MCP_HOOK_HISTORY_ENABLED: enables SQLite hook history. Defaults totrue.CODEX_MCP_HOOK_HISTORY_MAX_TEXT_CHARS: per-message hook capture limit.CODEX_KB_HISTORY_PROJECTS_ROOT: optional legacy normalized KB history root.CODEX_BINARY_PATH: optional explicit Codex binary path.CODEX_MCP_DEFAULT_SANDBOX: default write sandbox. Defaults todanger-full-access.CODEX_MCP_DEFAULT_APPROVAL_POLICY: default write approval policy. Defaults tonever.CODEX_MCP_DEFAULT_MODEL: default Codex model passed to app-server.CODEX_MCP_DEFAULT_EFFORT: default effort level.CODEX_MCP_APPROVAL_RESPONSE_TIMEOUT_SECONDS: pending interaction timeout.DEEPSEEK_ENV_PATH: optional.envfile for DeepSeek summary settings.DEEPSEEK_SUMMARY_ENABLED: enables or disables remote summary calls.
The write policy values are defaults, not hard limits. A client call can pass
sandbox or approval_policy explicitly, for example to run one task in
read-only or on-request mode.
Example:
$env:CODEX_CONTROL_PLANE_MCP_CONFIG = Join-Path (Get-Location) "examples\codex-control-plane-mcp.config.json"
$env:CODEX_MCP_DEFAULT_SANDBOX = "danger-full-access"
$env:CODEX_MCP_DEFAULT_APPROVAL_POLICY = "never"
py -m codex_control_plane_mcp.server
See examples/codex-control-plane-mcp.config.json.
Reliability model
The server is built for common local orchestration failures:
- MCP client timeout after task submission.
- Repeated submit with the same
client_request_id. - Repeated submit without an idempotency key but with the same active prompt.
- MCP process restart between app-server
thread/startandturn/start. - Two MCP processes sharing one SQLite state DB.
- App-server exit while a turn is active.
- Pending approval tied to an old app-server generation.
- App-server or transcript gaps where hook history still captured the prompt, visible agent text, final answer, and completion status.
These cases are stored in durable operation, workflow, turn, hook, and pending
interaction state. Terminal statuses are explicit.
unknown_after_app_server_exit is not treated as success.
Safety
- Live smoke prompts must include
MCP LIVE TEST / DO NOT MODIFY FILES. - Repairs default to
dry_run=true. - Forced app-server restart can mark active turns as unknown or orphaned. Prefer
restart_app_server_idle.
Checks
Fast local checks:
python -m pytest -q
python -m compileall -q openclaw_codex_mcp codex_control_plane_mcp tests scripts
git diff --check
Protocol-only MCP smoke:
python .\scripts\mcp_live_smoke.py --scenario protocol
Safe live smoke with real Codex Desktop/app-server:
python .\scripts\mcp_live_smoke.py --scenario safe-operation --cwd <PROJECT_ROOT>
Full live regression:
python .\scripts\mcp_live_smoke.py --scenario full --safe-restart --cwd <PROJECT_ROOT>
See docs/RELEASE_CHECKLIST.md. For public launch positioning, see docs/PUBLICATION_GUIDE.md.
Packaging
Build locally:
python -m pip install build
python -m build
The wheel includes the MCP server, the hook installer, the admin helper, and the bundled Codex hook module.
The normal install path is:
pipx install codex-control-plane-mcp
or:
uvx codex-control-plane-mcp
Contributing
Read CONTRIBUTING.md and SECURITY.md before opening issues that include diagnostics.
Good GitHub topics for this repo:
python, mcp, mcp-server, model-context-protocol, openai-codex,
codex, codex-desktop, agent-tools, ai-agents, developer-tools,
automation, orchestration, agentic-workflows, long-running-tasks,
openclaw.
Project details
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file codex_control_plane_mcp-0.1.1.tar.gz.
File metadata
- Download URL: codex_control_plane_mcp-0.1.1.tar.gz
- Upload date:
- Size: 2.0 MB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
2f4a200144e4c3488d017e7c3197db6d28f7c994f2fac89e859893510d6664e6
|
|
| MD5 |
f3199cebeb24ceb665a8fbb91821a309
|
|
| BLAKE2b-256 |
e3c518a1381815ed6232521963ac560b97a0c42bfec38aefe71c257b3e0eea4a
|
Provenance
The following attestation bundles were made for codex_control_plane_mcp-0.1.1.tar.gz:
Publisher:
publish-pypi.yml on aresyn/codex-control-plane-mcp
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
codex_control_plane_mcp-0.1.1.tar.gz -
Subject digest:
2f4a200144e4c3488d017e7c3197db6d28f7c994f2fac89e859893510d6664e6 - Sigstore transparency entry: 1850476785
- Sigstore integration time:
-
Permalink:
aresyn/codex-control-plane-mcp@fa74d08d7b9305355059d536cd010f64dfc71918 -
Branch / Tag:
refs/tags/v0.1.1 - Owner: https://github.com/aresyn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish-pypi.yml@fa74d08d7b9305355059d536cd010f64dfc71918 -
Trigger Event:
release
-
Statement type:
File details
Details for the file codex_control_plane_mcp-0.1.1-py3-none-any.whl.
File metadata
- Download URL: codex_control_plane_mcp-0.1.1-py3-none-any.whl
- Upload date:
- Size: 137.5 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
7886f945803dec38ab37fe8effe53d54ef7e32e3f17db8e3ce90ea19ebbbe9bf
|
|
| MD5 |
0d0efddcac05a487efb413092ccd7017
|
|
| BLAKE2b-256 |
8706ac2e0f792fc7279768be7ac656164df3974554495d4db78525c4b2315170
|
Provenance
The following attestation bundles were made for codex_control_plane_mcp-0.1.1-py3-none-any.whl:
Publisher:
publish-pypi.yml on aresyn/codex-control-plane-mcp
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
codex_control_plane_mcp-0.1.1-py3-none-any.whl -
Subject digest:
7886f945803dec38ab37fe8effe53d54ef7e32e3f17db8e3ce90ea19ebbbe9bf - Sigstore transparency entry: 1850476915
- Sigstore integration time:
-
Permalink:
aresyn/codex-control-plane-mcp@fa74d08d7b9305355059d536cd010f64dfc71918 -
Branch / Tag:
refs/tags/v0.1.1 - Owner: https://github.com/aresyn
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish-pypi.yml@fa74d08d7b9305355059d536cd010f64dfc71918 -
Trigger Event:
release
-
Statement type:







