A computer vision toolkit focused on color detection and feature matching using OpenCV. It allows you to easily start the picamera in case you're using a Raspberry PI.

Project description
About
A computer vision toolkit focused on color detection and feature matching using OpenCV. It allows you to easily start the picamera in case you're using a Raspberry PI.
Some of the stuff you can currently do
- Color detection
- Detect a range of colors in an image using HSV boundaries.
- Find bounding boxes.
- Feature matching
- Draw matches between a source and target image.
- Find bounding boxes.
- Picamera
- Easily start the picamera.
- Tools
- Draw boxes.
- Draw boxes' offset from the center of the frame.
- Stack frames in a grid.
Dependencies
| Dependency | Installation |
|---|---|
| python3 | Refer to the official website |
| opencv | Refer to the official installation guide (tested with version 4.5.2) |
| numpy | pip install numpy |
| picamera | Installed by default in Raspberry PI OS (required only if working with a picamera) |
Installation
pip install cv-recon
Usage
See examples in the examples folder or test it directly form source. Change directory cd cv_recon/recon/ once in this folder you can run:
| Command | Description | Preview |
|---|---|---|
python colorspace.py |
Generates HSV settings to detect a specific color |  |
python colorspace.py <path to .log file> |
Loads HSV settings to detect a specific color | 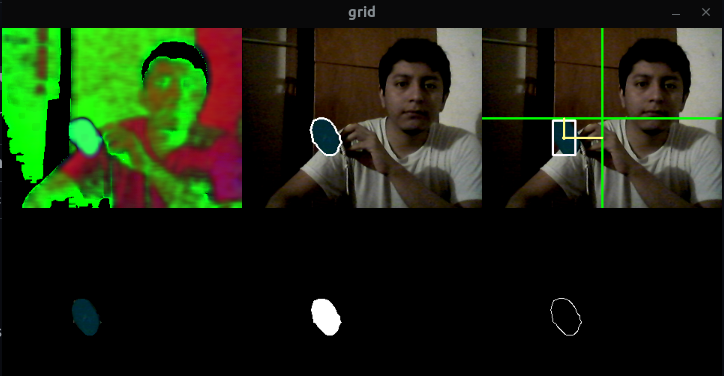 |
python features.py <path to an image> |
Performs feature detection against a given image | 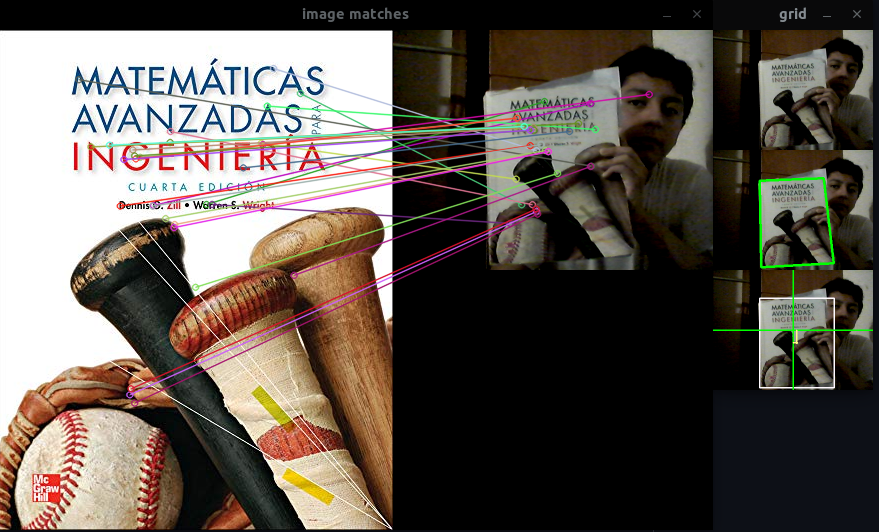 |
Documentation
Class: Colorspace(hsv_settings=None)
This class allows you to detect a range of colors using HSV boundaries. You can generate the settings or set them directly. See examples here.
| Args | Description | Default |
|---|---|---|
| hsv_settings | Path to .log file containing the HSV settings or list containing lower and upper HSV boundaries | None |
Import example
from cv_recon import Colorspace
# load generated settings
colorspace_1 = Colorspace('settings.log')
# or set hsv lower and upper boundaries
colorspace_2 = Colorspace([ [0, 0, 0], [179, 255, 255] ])
Properties
| Property | Description | Type | Default |
|---|---|---|---|
| lower | Lower HSV boundary | list | None |
| upper | Upper HSV boundary | list | None |
| im_mask | Mask obtained from the HSV boundaries | np.array | None |
| im_cut | Portions of the frame containing the color boundaries | np.array | None |
| im_edges | Canny edge detection applied to im_mask | np.array | None |
| im_contours | Contours of the detected objects drawn on the current frame | np.array | None |
Methods
loadSettings(settings)
Loads HSV settings from a generated .log file.
| Args | Description | Default |
|---|---|---|
| settings | Path to .log file with generated HSV settings | None |
returns: None
dumpSettings(output='last.log')
Generates a .log file with the current HSV settings.
| Args | Description | Default |
|---|---|---|
| output | Path in which the file is gonna be written | 'last.log' |
returns: None
createSliders()
Creates a window with sliders in order to adjust the HSV settings.
returns: None
updateHSV()
Updates the current HSV settings with the current slider values.
returns: None
getMaskBoxes(im_base, im_hsv, min_area=20, scale=0.1)
Generates a list containing the bounding boxes (x, y, w, h) of the objects.
| Args | Description | Default |
|---|---|---|
| im_base | Base image in bgr format | None |
| im_hsv | Base image in hsv format | None |
| min_area | Minimum area to generate the coordinates | 20 |
| scale | Scale of the bounding box | 0.1 |
returns: bounding_boxes
getMaskBoxesArea(im_base, im_hsv, min_area=20, scale=0.1)
Generates two lists containing the bounding boxes (x, y, w, h) and the estimated area of each object.
| Args | Description | Default |
|---|---|---|
| im_base | Base image in bgr format | None |
| im_hsv | Base image in hsv format | None |
| min_area | Minimum area to generate the coordinates | 20 |
| scale | Scale of the bounding box | 0.1 |
returns: bounding_boxes, areas
Class: Features(im_source=None, features=500)
This class allows you to easily perform feature matching detection. See examples here.
| Args | Description | Default |
|---|---|---|
| im_source | Source image | None |
| features | Amount of features in im_source | 500 |
Import example
from cv_recon import Features
import cv2 as cv
# load source image (the image you want to detect)
im_source = cv.imread('image.jpg')
# create Features object (detects 1000 features from the source image)
my_feature = Features(im_source, 1000)
Properties
| Property | Description | Type | Default |
|---|---|---|---|
| im_source | Source image (the image you want to detect) | np.array | im_source |
| im_source_kp | Source image keypoints | np.array | im_source keypoints |
| im_target | Target image | np.array | None |
| im_target_kp | Target image keypoints | np.array | None |
| im_poly | Image containing a polygon around the best matches | np.array | None |
Methods
loadTarget(im)
Loads the target image to perform the feature matching detection.
| Args | Description | Default |
|---|---|---|
| im | Target image in which the feature matching is gonna be perform | None |
returns: None
getMatches(distance=0.75)
Generates a list with the good matches found in the target image.
| Args | Description | Default |
|---|---|---|
| distance | Threshold which decides if it is a good match | 0.75 |
returns: good_matches
matchPoints(matches)
Returns an image containing the matches between im_target and im_source.
| Args | Description | Default |
|---|---|---|
| matches | List containing the good matches | None |
returns: image
getBoxes(matches, min_matches=20)
Generates a list containing the bounding box (x, y, w, h) of the object.
| Args | Description | Default |
|---|---|---|
| matches | Good matches | None |
| min_matches | Minimum amount of matches to generate the bounding box | 20 |
returns: bounding_box
Class: PiCam(resolution=(320, 240), framerate=32, **kargs)
This class allows you to easily interact with the picamera. See examples here.
| Args | Description | Default |
|---|---|---|
| resolution | Camera resolution | (320, 240) |
| framerate | Framerate | 32 |
| **kargs | Assign default picamera settings. See a list of the settings here | None |
Import example
from cv_recon.picam import PiCam
# cam settings
res = (320, 240)
fps = 24
# initialize the camera
camera = PiCam(res, fps, brightness=55, contrast=10)
Properties
| Property | Description | Type |
|---|---|---|
| current_frame | Current frame | np.array |
Methods
videoCapture()
Creates a thread which updates the property current_frame .
returns: None
release()
Stops updating the property current_frame .
returns: None
effects()
Prints the list of image effects.
returns: None
exposureModes()
Prints the list of exposure modes.
returns: None
awbModes()
Prints the list of automatic withe balance modes.
returns: None
Module: cv_tools
This module allows you generate a grid of images, draw bounding boxes and its offset from the center of the frame.
Import example
from cv_recon import cv_tools
Functions
grid(base, dimensions, images, scale=0.5)
Generates a numpy.array containing a grid of images with the given dimensions and scale.
| Args | Description | Default |
|---|---|---|
| base | Image with the base dimensions for the rest of the images | None |
| dimensions | Tupla containing the dimensions of the grid | None |
| images | List of images not larger than dimensions[0] * dimensions[1], each image must have the same dimensions as base |
None |
| scale | Scale of the output image | 0.5 |
Returns: image
getBoxesOffset(im, boxes)
Generates a list containing the offset of each box from the center of the frame.
| Args | Description | Default |
|---|---|---|
| im | Image with the size of the frame | None |
| boxes | List of bounding boxes | None |
Returns: [x_offset, y_offset]
drawBoxes(im, boxes)
Draw the bounding boxes over an image.
| Args | Description | Default |
|---|---|---|
| im | Image in which the bounding boxes are going to be drawn | None |
| boxes | List of bounding boxes | None |
Returns: image
drawBoxesPos(im, boxes)
Draw the offset from the center of the frame of each bounding box.
| Args | Description | Default |
|---|---|---|
| im | Image in which the offsets are going to be drawn | None |
| boxes | List of bounding boxes | None |
Returns: image
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file cv-recon-1.0.0.tar.gz.
File metadata
- Download URL: cv-recon-1.0.0.tar.gz
- Upload date:
- Size: 10.4 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.4.1 importlib_metadata/3.10.0 pkginfo/1.5.0.1 requests/2.24.0 requests-toolbelt/0.9.1 tqdm/4.42.0 CPython/3.6.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
5b172338e31e828991728a7772b475389912cec7b4b3d90be2002fa40081e9ee
|
|
| MD5 |
8ba359ffbe7e9d54415067cbb33c46e1
|
|
| BLAKE2b-256 |
e2bca86b6114a81f54ddc4e377f587e425c6497991173678284dca86aec113ae
|
File details
Details for the file cv_recon-1.0.0-py3-none-any.whl.
File metadata
- Download URL: cv_recon-1.0.0-py3-none-any.whl
- Upload date:
- Size: 10.7 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.4.1 importlib_metadata/3.10.0 pkginfo/1.5.0.1 requests/2.24.0 requests-toolbelt/0.9.1 tqdm/4.42.0 CPython/3.6.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
b4f6462b90adeac03c59c04a6fe500f8ed81a03996a7ab44a333c234273ca97b
|
|
| MD5 |
fd451dafc3787d5122d730a299fc52a5
|
|
| BLAKE2b-256 |
fe54a0c893babe1c4831203637a20fa314f968ac3bb25b1f5f6697b281327b19
|







