A wrapped package for Data-enabled predictive control (DeePC) implementation. Including DeePC and Robust DeePC design with multiple objective functions.

Project description
Introduction to my developed deepctools toolbox for data-enabled predictive control.
Github project: link
Introduction: link
DeePCtools
A wrapped package for Data-enabled predictive control (DeePC) implementation. Including DeePC and Robust DeePC design with multiple objective functions.
If you have questions, remarks, technical issues etc. feel free to use the issues page of this repository. I am looking forward to your feedback and the discussion.
I. How to use
This package operates within the Python framework.
1. Required packages
- Numpy
- Matplotlib
- CasADi <-- 3 <= version <= 4
2. Usage
-
Download the deepctools file and save it to your project directory.
-
Or install using pip
pip install deepctools
Then you can use the deepctools in your python project.
II. deepctools toolbox organization
.
└── deeptools
├── hankel
├── deepctools
│ ├── initialize_DeePCsolver
│ ├── initialize_RDeePCsolver
│ └── solver_step
├── getCasadiFunc
└── DiscreteSimulator
Under this file and function, there is detailed explanation of the usage, inputs, outputs of the functions.
1. hankel
Construct Hankel matrix of order L based on data x
- The data x: $x \in \mathbb{R}^{T, n_x}$
- The Hankel matrix: $H_L(x) \in \mathbb{R}^{n_x L \times T - L + 1}$
2. deepctools
Formulate and solve the DeePC problem, including DeePC and Robust DeePC design.
Construct the nlp solver for DeePC using CasADi IPOPT sovler, only formulate the solver once at the first beginning.
In the online loop, no need to reformulate the NLP problem which saves lots of computational time.
Each iteration, only need provide updated parameters: $u_{ini}$, $y_{ini}$ (, $u_{ref}$, $y_{ref}$ if set-point changes during control).
Objective function: $J = \Vert y - y^r \Vert_Q^2 + \Vert u_{loss} \Vert_R^2 + \mathcal{o}(\sigma_y, g)$
$u_{loss}$ can be:
'u': u
'uus': u - u_ref
'du': delta u
There is a tutorial file in tutorial.py.
a. initialize_DeePCsolver(uloss, opts)
Formulate the DeePC design with different loss on control inputs.
The optmization problem can be formulated as:
Standard DeePC design: | Equivalent expression
min J = || y - yref ||_Q^2 + || uloss ||_R^2 | min J = || Uf*g - yref ||_Q^2 + || uloss ||_R^2
s.t. [Up] [uini] | s.t. Up * g = uini
[Yp] * g = [yini] | Yp * g = yini
[Uf] [ u ] | ulb <= u <= uub
[Yf] [ y ] | ylb <= y <= yub
ulb <= u <= uub |
ylb <= y <= yub | uloss = (u) or (u - uref) or (du)
b. initialize_RDeePCsolver
Formulate the Robust DeePC design with slack variables and different loss on control inputs.
The optmization problem can be formulated as:
Robust DeePC design: | Equivalent expression
min J = || y - yref ||_Q^2 + || uloss ||_R^2 | min J = || Uf*g - ys ||_Q^2 + || uloss ||_R^2
+ lambda_y||sigma_y||_2^2 | + lambda_y||Yp*g-yini||_2^2
+ lambda_g||g||_2^2 | + lambda_g||g||_2^2
s.t. [Up] [uini] [ 0 ] | s.t. Up * g = uini
[Yp] * g = [yini] + [sigma_y] | ulb <= u <= uub
[Uf] [ u ] [ 0 ] | ylb <= y <= yub
[Yf] [ y ] [ 0 ] |
ulb <= u <= uub |
ylb <= y <= yub | uloss = (u) or (u - uref) or (du)
c. solver_step
Solve the optimization problem for one step, and output the optimized control inputs, operator g, and solving time.
3. getCasadiFunc
Construct the Function using CasADi
4. DiscreteSimulator
Construct the discrete system simulator for predicting next step
III. Tutorial
This is a tutorial example to illustrate how to use the deepctools to develop and implement DeePC design to different processes.
1. Plant
A simple discrete-time nonlinear model of polynomial single-input-single-output system is used:
y(t) = 4 * y(t-1) * u(t-1) - 0.5 * y(t-1) + 2 * u(t-1) * u(t) + u(t)
The model has been crafted as a Plant class to facilitate its utilization.
Notice:
- This system is adopted from the paper.
- Note this plant is a nonlinear model which do not satisfy the assumption of Fundamental Lemma, the control performance can be bad.
- For your own project, you can replace this plant to your own system.
2. DeePC designs
Within the sample code, you have the option to specify either DeePC or Robust DeePC design, along with various objective functions. This segment is implemented within the main function.
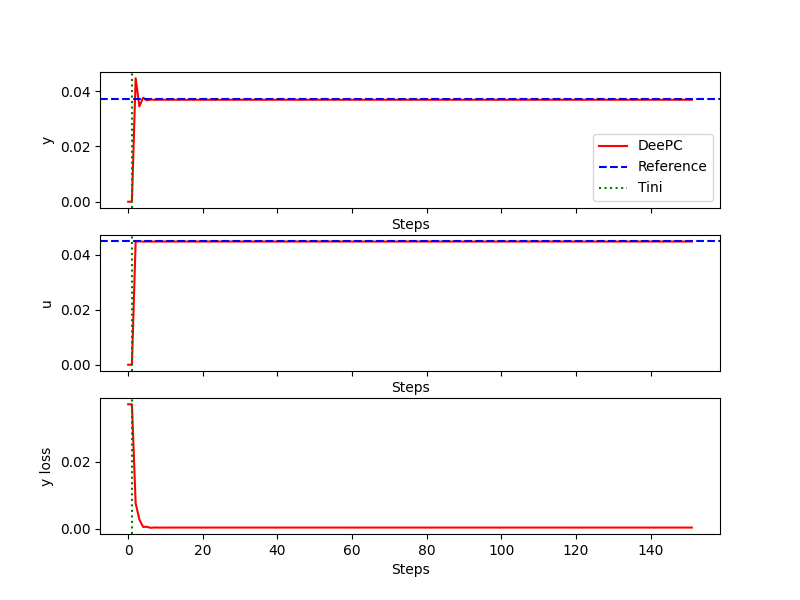
3. Tutorial results
Feasible DeePC config:
DeePC | {Tini:1, Np:5, T:5, uloss:uus} | T merely influence the performance as long as T>=5
Robust DeePC | {Tini:1, Np:1, T:600, uloss:du} | T will influence the steady-state loss
Robust DeePC | {Tini:1, Np:1, T:600, uloss:uus} | T will influence the steady-state loss
Robust DeePC | {Tini:1, Np:1, T:600, uloss:u} | T will influence the steady-state loss
Figure of control peformance under first config:
Application
This project has been applied and used in the following papers:
- Deep DeePC: Data-enabled predictive control with low or no online optimization using deep learning: paper & source code
@article{zhang2024deepdeepc,
title={Deep DeePC: Data-enabled predictive control with low or no online optimization using deep learnin},
author={Zhang, Xuewen and Zhang, Kaixiang and Li, Zhaojian and Yin, Xunyuan},
journal={arXiv:2408.16338},
year={2024}
}
License
The project is released under the APACHE license. See LICENSE for details.
Copyright 2024 Xuewen Zhang
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file deepctools-1.1.5.tar.gz.
File metadata
- Download URL: deepctools-1.1.5.tar.gz
- Upload date:
- Size: 22.0 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.0.0 CPython/3.9.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
ce1d0fd80fb20686322acf316b347a54a7fbf6ed6fe38d625e90c82004153bdd
|
|
| MD5 |
9ef8664c4f316acd8bcad8d7fe858dfd
|
|
| BLAKE2b-256 |
a93641b44276ab5cd133d0e65c7c7a7b867cb0f7e3d63496d6c22403c76cda3a
|
File details
Details for the file deepctools-1.1.5-py3-none-any.whl.
File metadata
- Download URL: deepctools-1.1.5-py3-none-any.whl
- Upload date:
- Size: 23.4 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.0.0 CPython/3.9.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
198486f0e2c00150adbb224e749c16959ead5efba88a65cf2de75e24cc63cea0
|
|
| MD5 |
d45391be969e8a80fcdbeb93664f3697
|
|
| BLAKE2b-256 |
4cbaf225a37604cf01a579e29b5212dc1ffc56417044dd984915151de3b13c59
|







