EPyT-Control -- EPANET Python Toolkit - Control

Project description






EPyT-Control -- EPANET Python Toolkit - Control
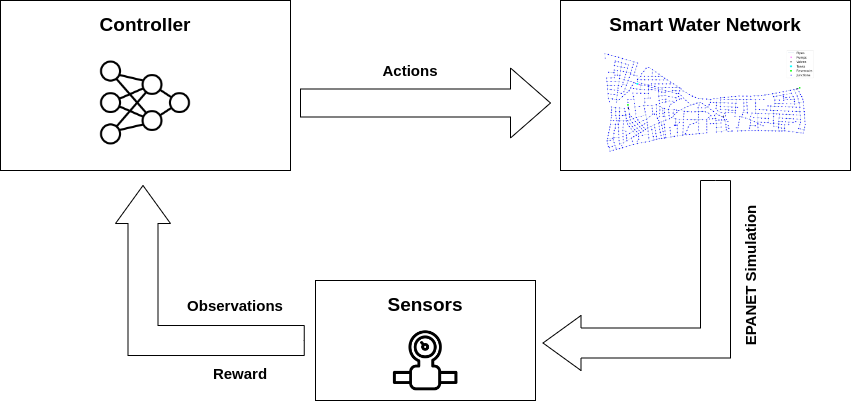
EPyT-Control is a Python package building on top of EPyT-Flow for implementing and evaluating control algorithms & strategies in water distribution networks (WDNs).
A special focus of this Python package is Reinforcement Learning for data-driven control in WDNs and therefore it provides full compatibility with the Stable-Baselines3 package.
Unique Features
Unique features of EPyT-Control are the following:
- Support of hydraulic and (advanced) water quality simulation (i.e. EPANET and EPANET-MSX are supported)
- Compatibility with Gymnasium and integration of Stable-Baselines3
- Wide variety of pre-defined actions (e.g. pump state actions, pump speed actons, valve state actions, species injection actions, etc.)
- Implementation of classic control aglorithms such as PID controllers
- High- and low-level interface
- Object-orientated design that is easy to extend and customize
Installation
EPyT-Control supports Python 3.9 - 3.13
PyPI
pip install epyt-control
Git
Download or clone the repository:
git clone https://github.com/WaterFutures/EPyT-Control.git
cd EPyT-Control
Install all requirements as listed in REQUIREMENTS.txt:
pip install -r REQUIREMENTS.txt
Install the toolbox:
pip install .
Quick Example
Interface of Environments
Basic example demonstrating the environments' interface:
# Define/Specify MyEnv
# ....
# Load hypothetical environment "MyEnv"
with MyEnv() as env:
# Show the observation space
print(f"Observation space: {env.observation_space}")
# Run 1000 iterations -- assuming that autorest=True
obs, info = env.reset()
for _ in range(1000):
# Sample and apply a random action from the action space.
# TODO: Replace with some smart RL/control method
action = env.action_space.sample()
obs, reward, terminated, _, _ = env.step(action)
# Show action and observed reward
print(action, reward)
Applying Reinforcement Learning to a given Environment
Simple example of using Stable-Baselines3 for learning a policy to control the chlorine injection in a given environment called SimpleChlorineInjectionEnv:
from stable_baselines3 import PPO
from gymnasium.wrappers import NormalizeObservation
# Define/Specify SimpleChlorineInjectionEnv
# ....
# Load chlorine injection environment
with SimpleChlorineInjectionEnv() as env:
# Wrap environment
env = NormalizeObservation(env)
# Apply a simple policy learner
# You might want to add more wrappers (e.g. normalizing inputs, rewards, etc.) and logging here
# Also, inceasing the number of time steps might help as well
model = PPO("MlpPolicy", env, verbose=1)
model.learn(total_timesteps=1000)
model.save("my_model_clinject.zip") # Save policy
Documentation
Documentation is available on readthedocs: https://epyt-control.readthedocs.io/en/stable/
License
MIT license -- see LICENSE
How to Cite?
If you use this software, please cite it as follows:
@misc{github:epytcontrol,
author = {André Artelt},
title = {{EPyT-Control -- EPANET Python Toolkit - Control}},
year = {2024},
publisher = {GitHub},
journal = {GitHub repository},
howpublished = {\url{https://github.com/WaterFutures/EPyT-Control}}
}
How to get Support?
If you come across any bug or need assistance please feel free to open a new issue if non of the existing issues answers your questions.
How to Contribute?
Contributions (e.g. creating issues, pull-requests, etc.) are welcome -- please make sure to read the code of conduct and follow the developers' guidelines.


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file epyt_control-0.1.0.tar.gz.
File metadata
- Download URL: epyt_control-0.1.0.tar.gz
- Upload date:
- Size: 283.6 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.1.0 CPython/3.10.16
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
a5b0f76f0eb4d6d709515a350a06ea121e44855bdd7d819caefeb84b7981393d
|
|
| MD5 |
dfe014ffaefdccb42001c3516ab0753d
|
|
| BLAKE2b-256 |
4ae10d3c649c7db1eac8e7e8575a6d21d4125bba2000d9d01760381285b40608
|
File details
Details for the file epyt_control-0.1.0-py3-none-any.whl.
File metadata
- Download URL: epyt_control-0.1.0-py3-none-any.whl
- Upload date:
- Size: 19.7 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.1.0 CPython/3.10.16
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
1248dc93c2698ccb7f6ef919db4680b25b661c4b715856e8941d7eaec9547630
|
|
| MD5 |
dfbe616a7694b172c180aad72d3f49eb
|
|
| BLAKE2b-256 |
701731268d16af41c1bb8ed51db347b936185b5283aaf8a873c054f93730c727
|







