Generic EtherCAT master library built on PySOEM — bus management, PDO mapping, slave discovery

Project description
EtherCAT Master
Generic EtherCAT master library built on PySOEM. Provides bus management, slave discovery, configurable PDO mapping, automatic reconnection, and a built-in web interface for configuration.
Developed by Henschel Robotics GmbH.
Features
- Bus management -- connect, configure, and run an EtherCAT bus with one or more slaves
- Generic slave handle -- read/write raw PDO bytes for any device (Beckhoff terminals, servos, I/O modules, ...)
- PDO mapping -- configure SyncManager assignments per slave via a JSON file or SDO writes
- Bus discovery -- scan the bus and detect any EtherCAT device (Beckhoff, Henschel, or any other vendor)
- Auto-reconnect -- background health monitoring with automatic recovery on cable disconnect
- Web interface -- built-in browser GUI for adapter selection, bus scanning, PDO configuration, and going OP
- Extensible -- subclass
GenericSlaveor implement the slave handle interface to build device-specific drivers (see python-hdrive-etc)
Prerequisites
Windows
| Dependency | Purpose | License |
|---|---|---|
| Npcap | Raw Ethernet packet capture | Free for personal use (up to 5 systems). Commercial / redistribution requires an Npcap OEM license. |
Install Npcap with WinPcap API-compatible mode enabled (checkbox during setup).
Linux
| Dependency | Purpose | License |
|---|---|---|
libpcap |
Raw Ethernet packet capture | BSD (free for any use) |
Install via your package manager:
# Debian / Ubuntu
sudo apt install libpcap-dev
# Fedora / RHEL
sudo dnf install libpcap-devel
On Linux, raw Ethernet access requires root. Either run with sudo or grant the capability once:
# Option A – run with sudo
sudo pip install ethercat-master --break-system-packages
sudo ecmaster-web
# Option B – grant raw socket capability (no sudo needed afterwards)
sudo setcap cap_net_raw=ep $(readlink -f $(which python3))
Npcap is not needed on Linux --
libpcapprovides the same functionality and is BSD-licensed.
Raspberry Pi Quick-Start
# 1. Install libpcap
sudo apt update
sudo apt install libpcap-dev
# 2. Install ethercat-master system-wide (so sudo can find it)
sudo pip install ethercat-master --break-system-packages
# 3. Add ~/.local/bin to PATH (if not already)
echo 'export PATH="$HOME/.local/bin:$PATH"' >> ~/.bashrc
source ~/.bashrc
# 4. Launch the web interface (requires root for raw Ethernet)
sudo ecmaster-web --adapter eth0
Open http://<pi-ip>:8080 from any device on your network.
Connect the EtherCAT slave(s) directly to the Pi's Ethernet port (
eth0). Use Wi-Fi or a second USB-Ethernet adapter for SSH / network access.
Python
- Python 3.8+
- PySOEM >= 1.1.0 -- Cython wrapper around SOEM (installed automatically by pip)
Installation
pip install ethercat-master
Or install from source:
git clone https://github.com/henschel-robotics/python-ethercat-master.git
cd python-ethercat-master
pip install -e .
Quickstart
1. Find your network adapter
from ethercat_master import EtherCATBus
for a in EtherCATBus.list_adapters():
print(f"{a.desc} -> {a.name}")
Copy the adapter name (e.g. \Device\NPF_{GUID} on Windows, eth0 on Linux).
2. Connect and read PDO data
from ethercat_master import EtherCATBus, GenericSlave
import time
bus = EtherCATBus(adapter=r"\Device\NPF_{...}", cycle_time_ms=1)
slave = GenericSlave(0)
bus.register_slave(slave)
bus.open()
# Read inputs
print(slave.input.hex())
# Write outputs
slave.output = bytes([0xFF])
time.sleep(2)
bus.close()
3. Discover slaves on the bus
slaves = EtherCATBus.discover(adapter=r"\Device\NPF_{...}")
for s in slaves:
print(f"[{s['index']}] {s['device_name']} "
f"In={s['input_bytes']}B Out={s['output_bytes']}B")
PDO Configuration
Create a ethercat_config.json to control which PDOs are assigned per slave:
{
"network": {
"adapter": "\\Device\\NPF_{...}",
"cycle_ms": 1.0
},
"default": {},
"slaves": {
"0": {
"rx_pdo": ["0x1600", "0x1605"],
"tx_pdo": ["0x1A00", "0x1A05"]
}
}
}
Pass it when creating the bus:
bus = EtherCATBus(adapter=..., cycle_time_ms=1, pdo_config_path="ethercat_config.json")
Or use the web interface to scan the bus, select PDOs with checkboxes, and save.
Raspberry Pi / Linux: When installed via pip, the default
ethercat_config.jsonis inside the package directory (e.g./usr/local/lib/python3.13/dist-packages/ethercat_master/ethercat_config.json). Copy it to your working directory for easy editing:cp $(python3 -c "import ethercat_master, os; print(os.path.join(os.path.dirname(ethercat_master.__file__), 'ethercat_config.json'))") .
Web Interface
Start the built-in web server using the console script (after pip install ethercat-master):
sudo ecmaster-web
sudo ecmaster-web --port 8080
sudo ecmaster-web --pdo-config /path/to/ethercat_config.json
Or run the same entry point as a module (useful in venvs, CI, or when ecmaster-web is not on PATH):
sudo python -m ethercat_master.webserver
sudo python -m ethercat_master.webserver --port 8080
sudo python -m ethercat_master.webserver --pdo-config /path/to/ethercat_config.json
On Windows, omit sudo (Npcap provides raw Ethernet access for the current user).
Then open http://localhost:8080 in your browser.
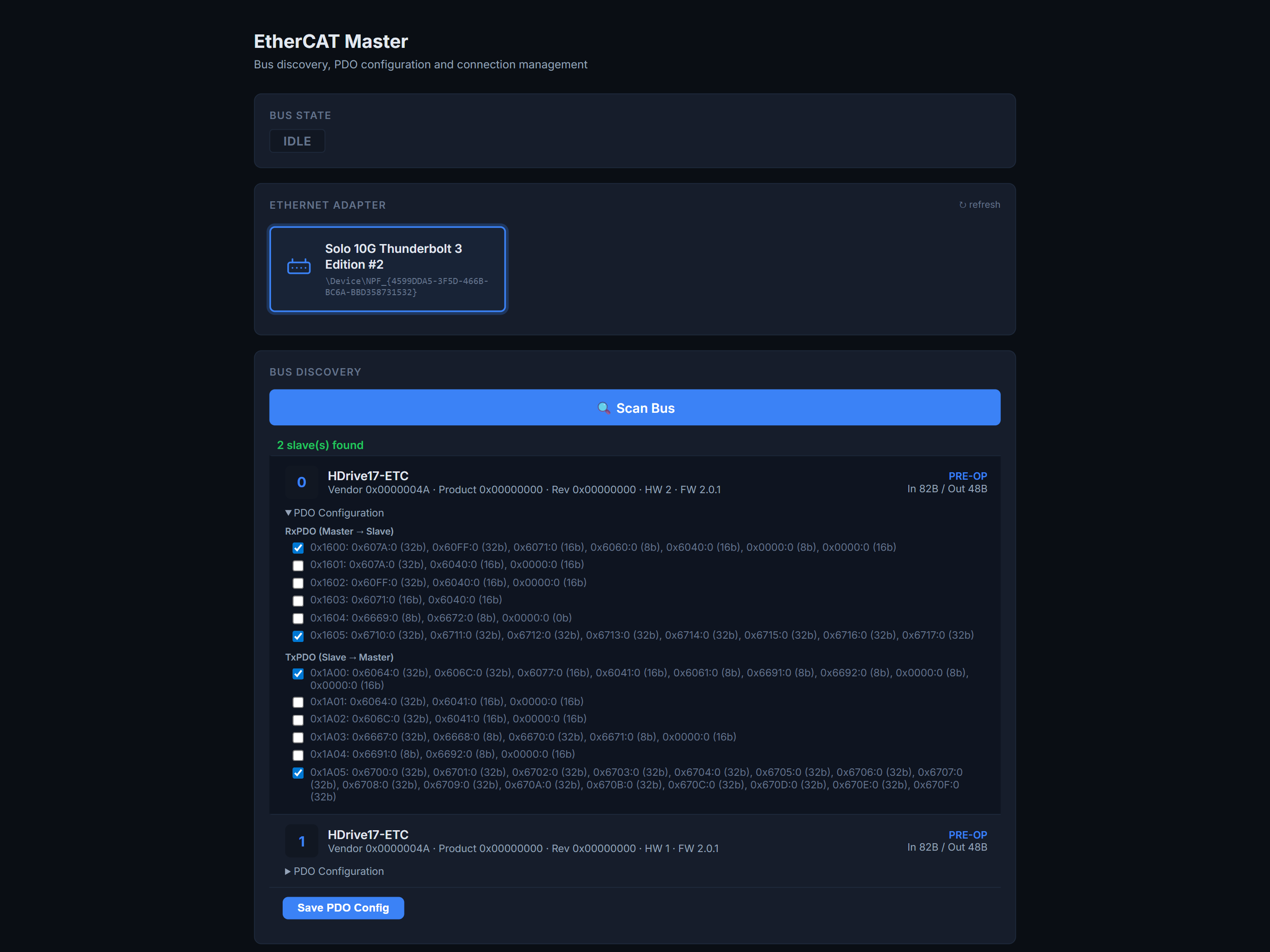
The web GUI lets you:
- Select a network adapter
- Scan the bus and discover any EtherCAT device — Beckhoff terminals, IO modules, servo drives, and more
- Configure PDO assignments per slave
- Set the cycle time and go to OP state
- Run network latency tests (SDO round-trip measurement with histogram)
| Mixed bus (Beckhoff + HDrive) | Network Latency Test |
|---|---|
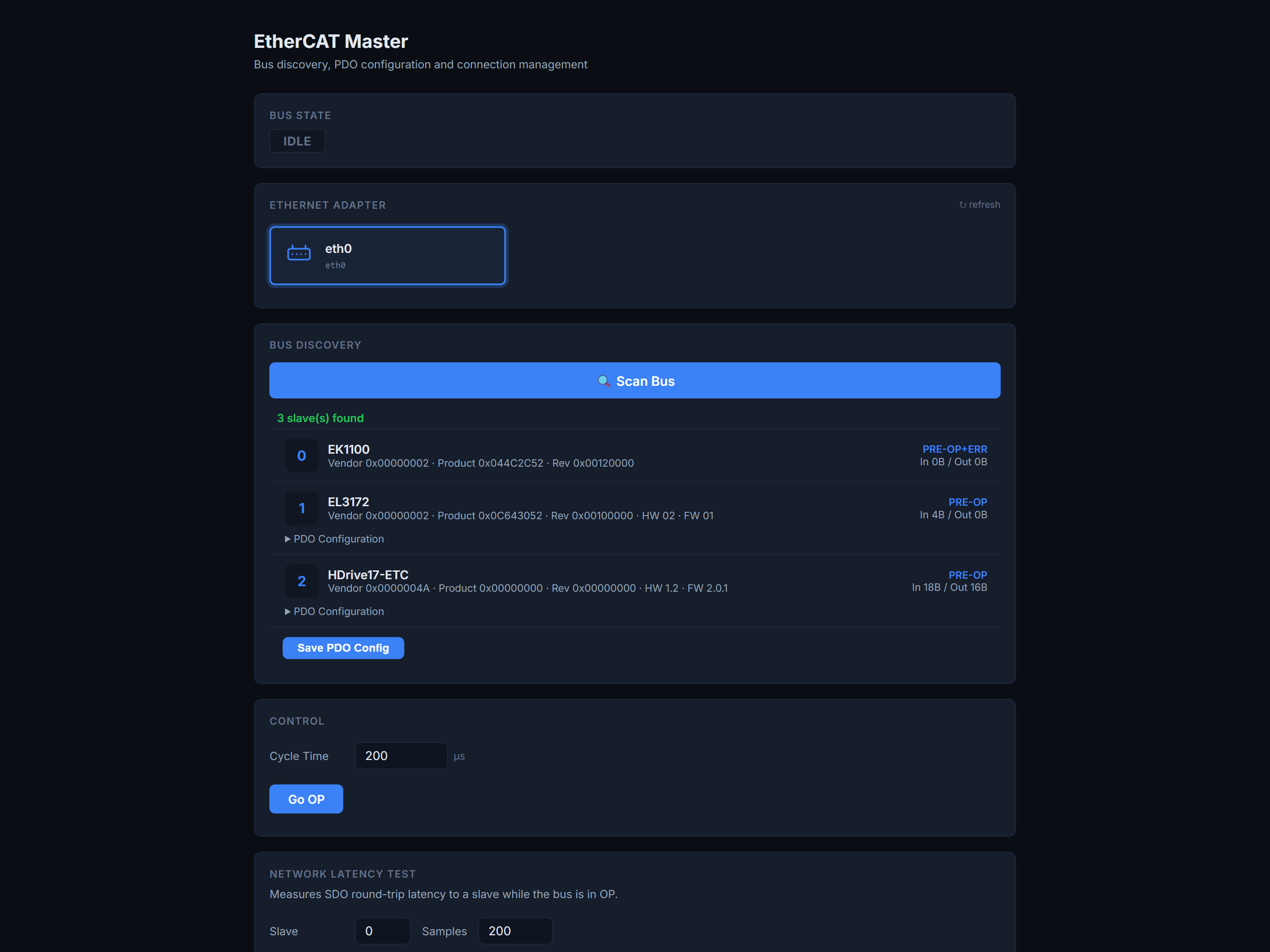 |
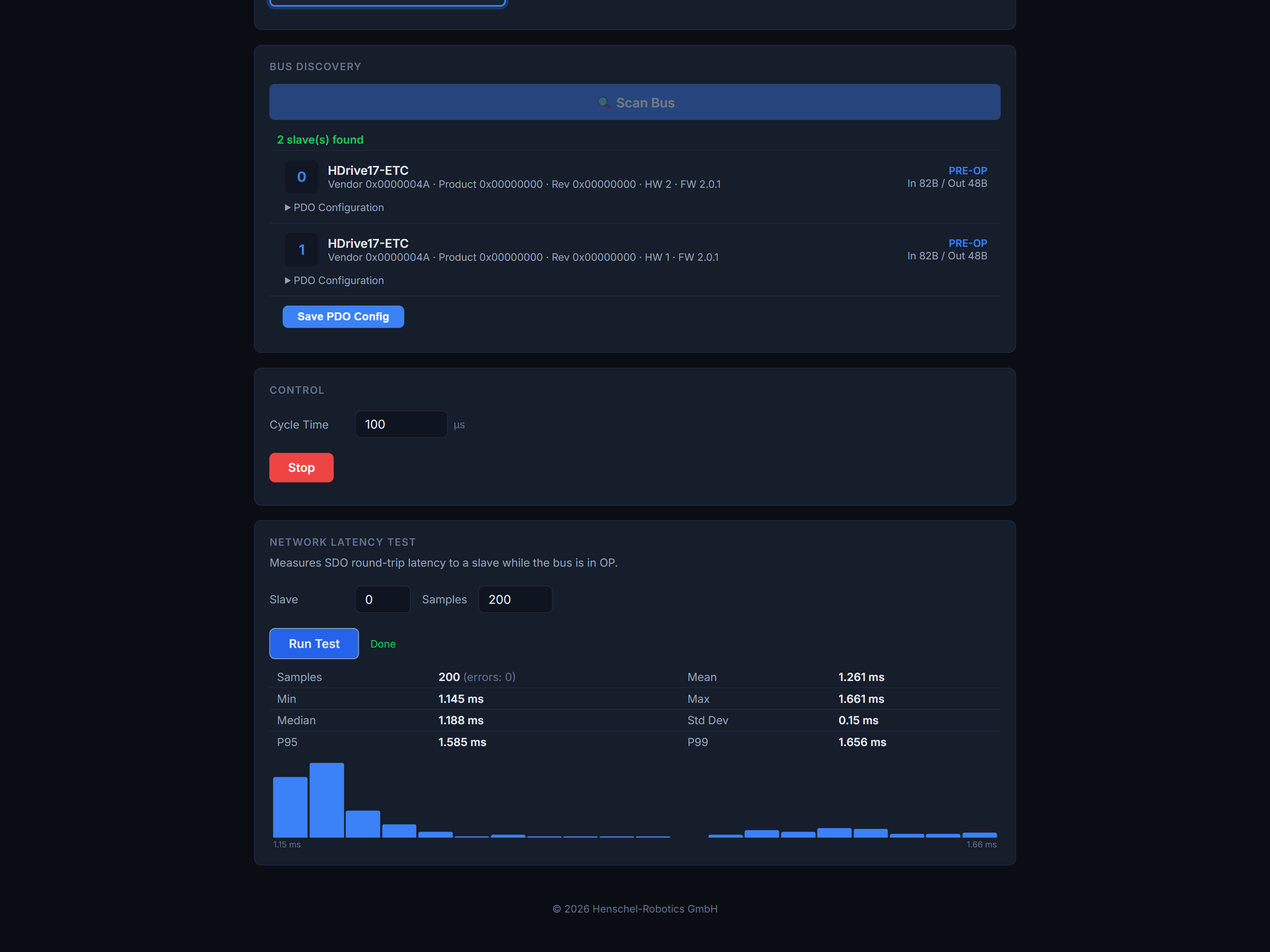 |
Full guide:
docs/web-interface.md
Project Structure
python-ethercat-master/
├── ethercat_master/
│ ├── __init__.py # Public API
│ ├── bus.py # EtherCATBus — core bus management
│ ├── slave.py # GenericSlave — universal slave handle
│ ├── pdo.py # PDO mapping configuration
│ ├── exceptions.py # Custom exceptions
│ ├── webserver.py # Built-in web server
│ └── webgui/
│ ├── index.html # Web GUI frontend
│ └── style.css # Stylesheet
├── examples/
│ ├── connect.py # Minimal single-slave example
│ ├── beckhoff.py # Beckhoff EK1100 + terminals
│ └── mixed_bus.py # HDrive motor + Beckhoff terminals
├── ethercat_config.json # Example PDO config
└── pyproject.toml
Examples
The examples/ folder contains ready-to-run scripts. The recommended workflow is:
-
Configure the bus using the web interface (
ecmaster-web):- Select your network adapter
- Click Scan Bus to discover all slaves
- Expand each slave and configure the PDO assignments
- Click Save PDO Config — this writes
ethercat_config.jsonwith the adapter, cycle time, and per-slave PDO mapping
-
Copy
ethercat_config.jsonnext to your script (or point to it withpdo_config_path) -
Run the example — the bus uses the preconfigured adapter and PDO mapping from the file:
sudo python3 examples/connect.py # Linux
python examples\connect.py # Windows
connect.py — Minimal single-slave example
Connects to one slave and continuously prints the raw input PDO bytes. Good for verifying that the bus works and PDOs are mapped correctly.
beckhoff.py — Beckhoff coupler + terminals
Scans the bus, discovers all terminals behind an EK1100 coupler, and reads their inputs in a loop. Standard Beckhoff terminals use factory-default PDO mappings from the SII EEPROM, so no ethercat_config.json is needed.
mixed_bus.py — HDrive motor + Beckhoff terminals
Demonstrates running an HDrive servo motor alongside Beckhoff I/O terminals on the same bus. Requires pip install hdrive-etc. The HDriveETC class is a slave handle that plugs into EtherCATBus just like GenericSlave, so you can combine any devices.
API Overview
EtherCATBus
| Method | Description |
|---|---|
EtherCATBus(adapter, cycle_time_ms, pdo_config_path) |
Create a bus instance |
list_adapters() |
List available network adapters |
discover(adapter, pdo_config_path) |
Scan the bus without going to OP |
register_slave(handle) |
Register a slave handle |
open() |
Configure slaves, map PDOs, start threads, go to OP |
close() |
Stop all slaves and close the connection |
GenericSlave
| Property / Method | Description |
|---|---|
GenericSlave(slave_index, use_default_pdo) |
Create a handle for slave at the given index |
slave.input |
Read-only bytes of the last received input PDO |
slave.output |
Read/write bytes for the output PDO |
Exceptions
| Exception | When |
|---|---|
ConnectionError |
Adapter not found, no slaves, state transition failed |
CommunicationError |
Bus communication lost or timed out |
ConfigurationError |
PDO mapping or config_map() failed |
Background Threads
When bus.open() is called, three background threads are started:
| Thread | Interval | Purpose |
|---|---|---|
| ProcessData | 1 ms | Raw EtherCAT frame send/receive |
| PDO Update | configurable | Decode RX / encode TX per slave |
| State Check | 300 ms | Health monitoring, auto-reconnect |
Publishing to PyPI
Install maintainer tools (includes build and twine):
pip install -e ".[dev]"
Configure PyPI API token (example for a shell):
export TWINE_USERNAME=__token__
export TWINE_PASSWORD=pypi-...your-token...
From the repository root:
# Build, check, upload to PyPI
python scripts/publish_pypi.py
# Test upload to TestPyPI
python scripts/publish_pypi.py --testpypi
# Build and validate only (no upload)
python scripts/publish_pypi.py --dry-run
# Remove dist/ and build/ before a clean build
python scripts/publish_pypi.py --clean
License
This project is MIT-licensed -- see pyproject.toml.
Copyright (c) Henschel Robotics GmbH
Third-party license notice
| Component | License | Notes |
|---|---|---|
| PySOEM | MIT | Cython wrapper (installed via pip) |
| SOEM | GPLv3 / Commercial | Bundled inside PySOEM. As of SOEM 2.0 the license is GPLv3 or a commercial license from rt-labs. If GPLv3 is incompatible with your product, contact rt-labs for a commercial SOEM license. |
| Npcap (Windows only) | Proprietary | Free for personal use (≤ 5 installs). Commercial use or redistribution requires an Npcap OEM license. |
| libpcap (Linux only) | BSD | Free for any use, no restrictions. |
Important for commercial products: If you ship a product that includes this library, you need to consider the SOEM (GPLv3) and Npcap (proprietary) license obligations. On Linux, only the SOEM license applies since libpcap is BSD.


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file ethercat_master-0.1.7.tar.gz.
File metadata
- Download URL: ethercat_master-0.1.7.tar.gz
- Upload date:
- Size: 39.2 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.12.10
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
0d1de9c4541acd7ab9992191c1dcc0d8ddf81be7d50d8a8ed6bc4c1bbddf1387
|
|
| MD5 |
16f09a4c2d00d7d687619c30d3221c52
|
|
| BLAKE2b-256 |
25b0705b18c8edfbc1e51815a99e81fc1e701039ec8e9d095632d1bd27a1a1f5
|
File details
Details for the file ethercat_master-0.1.7-py3-none-any.whl.
File metadata
- Download URL: ethercat_master-0.1.7-py3-none-any.whl
- Upload date:
- Size: 36.8 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.12.10
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
59caf9642ea54341745177811bc39bf717acfb2be4bd38a6efaa81cc4764698f
|
|
| MD5 |
ceff4a8d77cbe5187adfc917edcde8db
|
|
| BLAKE2b-256 |
7ee84cbb42a3fa9adfa636a62e98d1e94a45331b0a48d86ce310c89dc02db8a1
|







