Graph SLAM solver in Python

Project description


Documentation for this package can be found at https://python-graphslam.readthedocs.io/.
This package implements a Graph SLAM solver in Python.
Features
Optimize R^2, R^3, SE(2), and SE(3) datasets
Analytic Jacobians
Supports odometry and landmark edges
Supports custom edge types (see tests/test_custom_edge.py for an example)
Import and export .g2o files
Installation
pip install graphslamExample Usage
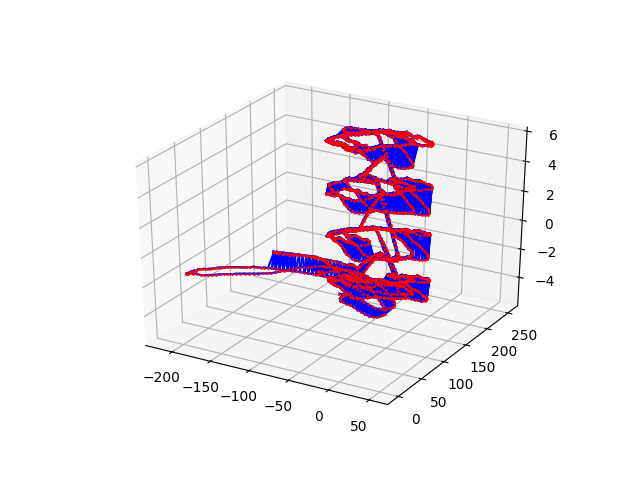
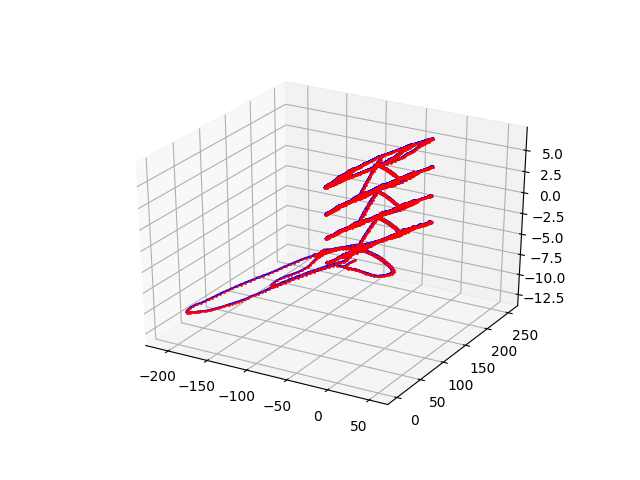
SE(3) Dataset
>>> from graphslam.graph import Graph
>>> g = Graph.from_g2o("data/parking-garage.g2o") # https://lucacarlone.mit.edu/datasets/
>>> g.plot(vertex_markersize=1)
>>> g.calc_chi2()
16720.02100546733
>>> g.optimize()
>>> g.plot(vertex_markersize=1)Output:
Iteration chi^2 rel. change
--------- ----- -----------
0 16720.0210
1 45.6644 -0.997269
2 1.2936 -0.971671
3 1.2387 -0.042457
4 1.2387 -0.000001
Original |
Optimized |
|
|
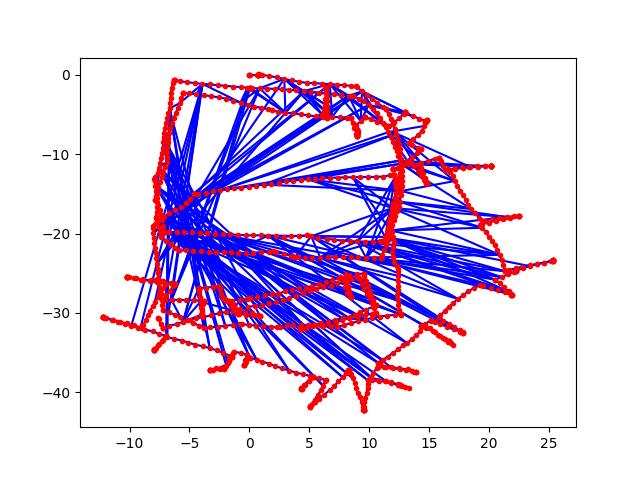
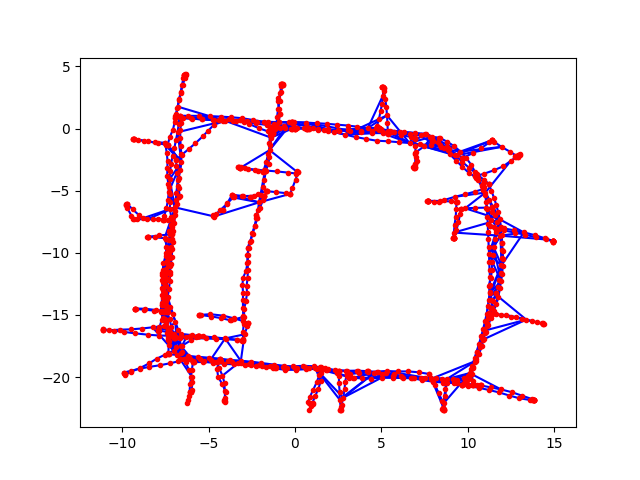
SE(2) Dataset
>>> from graphslam.graph import Graph
>>> g = Graph.from_g2o("data/input_INTEL.g2o") # https://lucacarlone.mit.edu/datasets/
>>> g.plot()
>>> g.calc_chi2()
7191686.382493544
>>> g.optimize()
>>> g.plot()Output:
Iteration chi^2 rel. change
--------- ----- -----------
0 7191686.3825
1 319950425.6477 43.488929
2 124950341.8035 -0.609470
3 338165.0770 -0.997294
4 734.7343 -0.997827
5 215.8405 -0.706233
6 215.8405 -0.000000
Original |
Optimized |
|
|
References and Acknowledgments
Grisetti, G., Kummerle, R., Stachniss, C. and Burgard, W., 2010. A tutorial on graph-based SLAM. IEEE Intelligent Transportation Systems Magazine, 2(4), pp.31-43.
Blanco, J.L., 2010. A tutorial on SE(3) transformation parameterizations and on-manifold optimization. University of Malaga, Tech. Rep, 3.
Carlone, L., Tron, R., Daniilidis, K. and Dellaert, F., 2015, May. Initialization techniques for 3D SLAM: a survey on rotation estimation and its use in pose graph optimization. In 2015 IEEE international conference on robotics and automation (ICRA) (pp. 4597-4604). IEEE.
Carlone, L. and Censi, A., 2014. From angular manifolds to the integer lattice: Guaranteed orientation estimation with application to pose graph optimization. IEEE Transactions on Robotics, 30(2), pp.475-492.
Thanks to Luca Larlone for allowing inclusion of the Intel and parking garage datasets in this repo.
Live Coding Graph SLAM in Python
If you’re interested, you can watch as I coded this up.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
File details
Details for the file graphslam-0.0.17.tar.gz.
File metadata
- Download URL: graphslam-0.0.17.tar.gz
- Upload date:
- Size: 35.5 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/4.0.2 CPython/3.11.6
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
482770a1e6aea732bbc5944d83a65e1ed74c458e29fc40b69f33178a3a87b574
|
|
| MD5 |
25c64b482927fb1354fc01a53e11975a
|
|
| BLAKE2b-256 |
191204ff8145ef171b81fec9042f156e903a14656f290778d0433f14c7842d07
|







