RING: Recurrent Inertial Graph-based Estimator

Project description
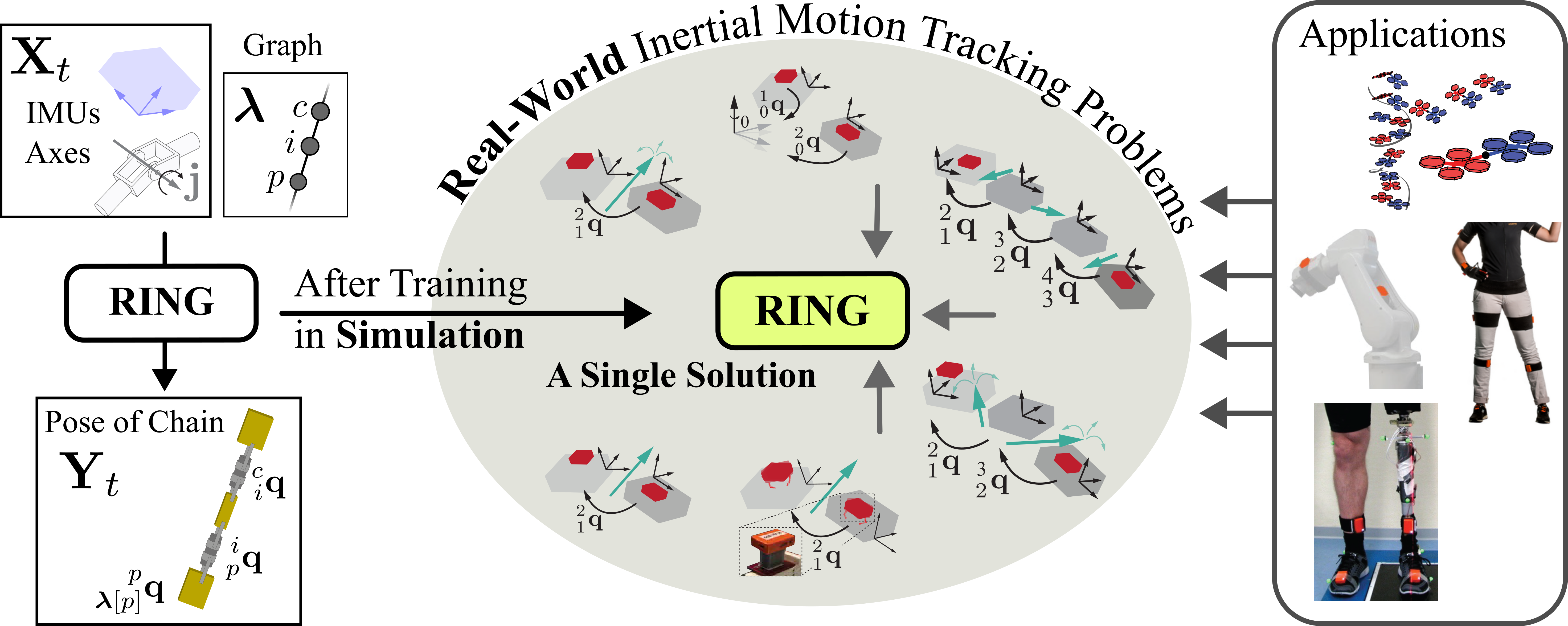
Recurrent Inertial Graph-based Estimator (RING)
RING provides a pluripotent, problem-unspecific plug-and-play IMT solution that, in contrast to conventional IMT solutions, eliminates the need for expert knowledge to identify, select, and parameterize the appropriate method. RING's pluripotency is enabled by a novel online-capable neural network architecture that uses a decentralized network of message-passing, parameter-sharing recurrent neural networks, which map local IMU measurements and nearest-neighbour messages to local orientations. This architecture enables RING to address a broad range of IMT problems that vary greatly in aspects such as the number of attached sensors, or the number of segments in the kinematic chain, and even generalize to previously unsolved IMT problems, including the challenging combination of magnetometer-free and sparse sensing with unknown sensor-to-segment parameters. Remarkably, RING is trained solely on simulated data, yet evaluated on experimental data, which indicates its exceptional ability to zero-shot generalize from simulation to experiment, while outperforming several state-of-the-art problem-specific solutions. For example, RING can, for the first time, accurately track a four-segment kinematic chain (which requires estimating four orientations) using only two magnetometer-free inertial measurement units.
ℹ️ Tip:
Check out my new plug-and-play interface for inertial motion tracking (RING included) here.
Installation
Supports Python=3.10/3.11/3.12 (tested).
Install with pip using
pip install imt-ring
Typically, this will install jax as cpu-only version. For GPU install instructions for jax see https://github.com/jax-ml/jax?tab=readme-ov-file#instructions.
Documentation
Available here.
Quickstart Example
import ring
import numpy as np
T : int = 30 # sequence length [s]
Ts : float = 0.01 # sampling interval [s]
B : int = 1 # batch size
lam: list[int] = [-1, 0, 1] # parent array
N : int = len(lam) # number of bodies
T_i: int = int(T/Ts) # number of timesteps
X = np.zeros((B, T_i, N, 9))
# where X is structured as follows:
# X[..., :3] = acc
# X[..., 3:6] = gyr
# X[..., 6:9] = jointaxis
# let's assume we have an IMU on each outer segment of the
# three-segment kinematic chain
X[..., 0, :3] = acc_segment1
X[..., 2, :3] = acc_segment3
X[..., 0, 3:6] = gyr_segment1
X[..., 2, 3:6] = gyr_segment3
ringnet = ring.RING(lam, Ts)
yhat, _ = ringnet.apply(X)
# yhat: unit quaternions, shape = (B, T_i, N, 4)
Known fixes
Offscreen rendering with Mujoco
mujoco.FatalError: an OpenGL platform library has not been loaded into this process, this most likely means that a valid OpenGL context has not been created before mjr_makeContext was called
Solution:
import os
os.environ["MUJOCO_GL"] = "egl"
Windows-related: ImportError: DLL load failed while importing ...
ImportError: DLL load failed while importing _multiarray_umath: Das angegebene Modul wurde nicht gefunden.
Solution:
pip uninstall -y jax jaxlibconda install -c conda-forge jax
Publications
The main publication is:
The following publications also utilize this software library, and refer to it as the Random Chain Motion Generator (RCMG) (more specifically the function ring.RCMG):
- RNN-based Observability Analysis for Magnetometer-Free Sparse Inertial Motion Tracking
- Plug-and-Play Sparse Inertial Motion Tracking With Sim-to-Real Transfer
- RNN-based State and Parameter Estimation for Sparse Magnetometer-free Inertial Motion Tracking
Other useful ressources
Particularly useful is the following publication from Roy Featherstone
Contact
Simon Bachhuber (simon.bachhuber@fau.de)
How to bump verion in this python package
- commit and push your code changes. Make sure to also update the version in
pyproject.toml - create the tag and push the tag
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file imt_ring-1.7.1.tar.gz.
File metadata
- Download URL: imt_ring-1.7.1.tar.gz
- Upload date:
- Size: 17.5 MB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
b3512cd97f734ffd43551a1d569b7ec2207e0556fa12ef52c1b35ac55ba06e0e
|
|
| MD5 |
72b93cf5c2a9662f014c030a5475d607
|
|
| BLAKE2b-256 |
d536d0de2b9c9094796452ff1d51d0393fdb18a195c6dceeb39d645b864032e7
|
Provenance
The following attestation bundles were made for imt_ring-1.7.1.tar.gz:
Publisher:
publish-to-pypi.yml on simon-bachhuber/ring
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
imt_ring-1.7.1.tar.gz -
Subject digest:
b3512cd97f734ffd43551a1d569b7ec2207e0556fa12ef52c1b35ac55ba06e0e - Sigstore transparency entry: 202061907
- Sigstore integration time:
-
Permalink:
simon-bachhuber/ring@203263c40b75fbd1d54e24c129fa7609b8da477d -
Branch / Tag:
refs/tags/v1.7.1 - Owner: https://github.com/simon-bachhuber
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish-to-pypi.yml@203263c40b75fbd1d54e24c129fa7609b8da477d -
Trigger Event:
push
-
Statement type:
File details
Details for the file imt_ring-1.7.1-py3-none-any.whl.
File metadata
- Download URL: imt_ring-1.7.1-py3-none-any.whl
- Upload date:
- Size: 17.5 MB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
3961890a45160d17353de758afe1cf4ce5b7a42df50f83c5330b4beada18dfbf
|
|
| MD5 |
4399523b3eb6ee4b02fbc07c11f740b6
|
|
| BLAKE2b-256 |
b54032dfd048eb98856099c06db76ee4c872f7bcd75a0d396b47d024bb338844
|
Provenance
The following attestation bundles were made for imt_ring-1.7.1-py3-none-any.whl:
Publisher:
publish-to-pypi.yml on simon-bachhuber/ring
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
imt_ring-1.7.1-py3-none-any.whl -
Subject digest:
3961890a45160d17353de758afe1cf4ce5b7a42df50f83c5330b4beada18dfbf - Sigstore transparency entry: 202061916
- Sigstore integration time:
-
Permalink:
simon-bachhuber/ring@203263c40b75fbd1d54e24c129fa7609b8da477d -
Branch / Tag:
refs/tags/v1.7.1 - Owner: https://github.com/simon-bachhuber
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish-to-pypi.yml@203263c40b75fbd1d54e24c129fa7609b8da477d -
Trigger Event:
push
-
Statement type:







