Differentiation Through Black-Box Quadratic Programming Solvers

Project description
dQP
Differentiation Through Black-Box Quadratic Programming Solvers [Paper]
Magoon*, Yang*, Aigerman, Kovalsky
Accepted. NeurIPS (2025)
Installation
pip install libdqp
This [PyPI package] includes PyTorch, open-source python interfaces to various QP and linear solvers, and tools for sparsity. Some QP solvers such as Gurobi are commercial, but offer [academic licenses]. Experiment-specific packages are detailed in the experiment section.
Introduction
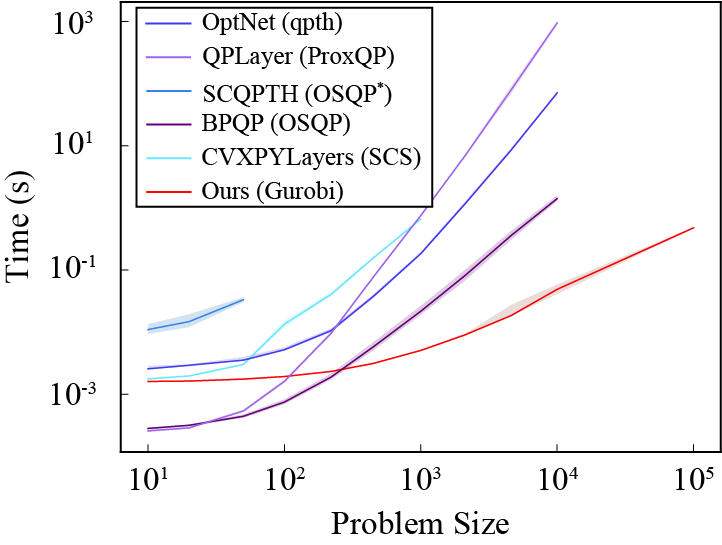
dQP is a modular framework for differentiating the solution to a quadratic programming problem (QP) with respect to its parameters, enabling the seamless integration of QPs into machine learning architectures and bilevel optimization. dQP supports over 15 state-of-the-art QP solvers by attaching a custom PyTorch layer to the open-source QP interface [qpsolvers]. It solves problems of the form,
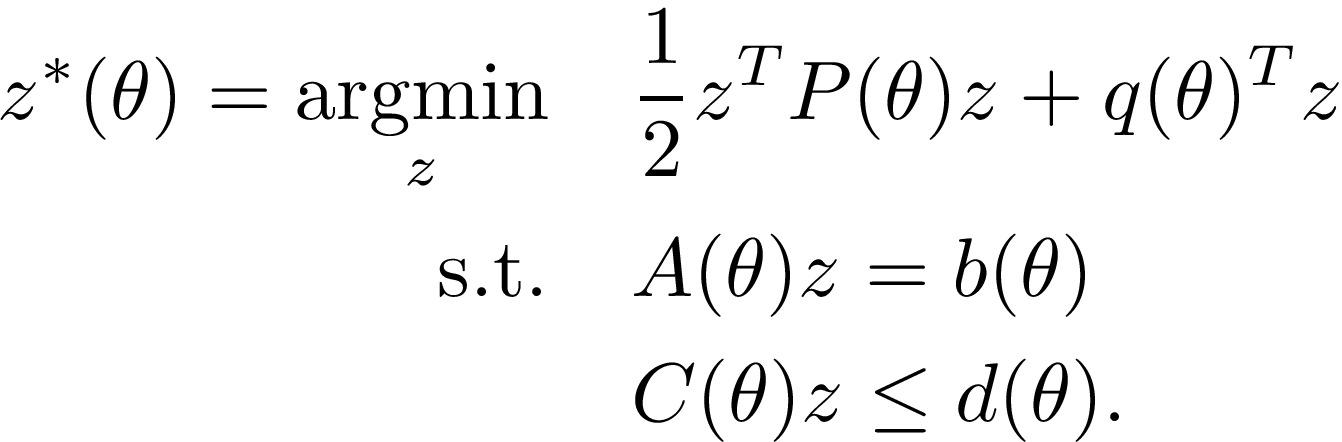
and is used as in the following example which uses QP solver [OSQP] and sparse symmetric indefinite linear solver [QDLDL],
import torch
import numpy as np
from scipy.sparse import csc_matrix
from dqp import dQP
from dqp.sparse_helper import csc_scipy_to_torch
# Define a simple QP: minimize x1^2 + x2^2 s.t. x1 + x2 >= 1, x >= 0
P = csc_matrix(np.array([[2.0, 0.0], [0.0, 2.0]]))
q = np.array([0.0, 0.0])
C = csc_matrix(np.array([[-1.0, -1.0], [-1.0, 0.0], [0.0, -1.0]]))
d = np.array([-1.0, 0.0, 0.0])
# Convert to PyTorch tensors
P_torch = csc_scipy_to_torch(P)
q_torch = torch.tensor(q, dtype=torch.float64, requires_grad=True)
C_torch = csc_scipy_to_torch(C)
d_torch = torch.tensor(d, dtype=torch.float64, requires_grad=True)
# Build settings with OSQP forward solver and qdldl backward solver
settings = dQP.build_settings(
solve_type="sparse",
qp_solver="osqp",
lin_solver="qdldl",
)
# Create layer and solve
layer = dQP.dQP_layer(settings=settings)
x_star, lambda_star, mu_star, _, _ = layer(P_torch, q_torch, C_torch, d_torch)
# Backpropagate (differentiate) through scalar loss L(x^*) = sum(x^*)
x_star.sum().backward()
print(f"Solution: {x_star.detach().numpy()}") # [0.5, 0.5]
print(f"Gradient w.r.t. d: {d_torch.grad.numpy()}")
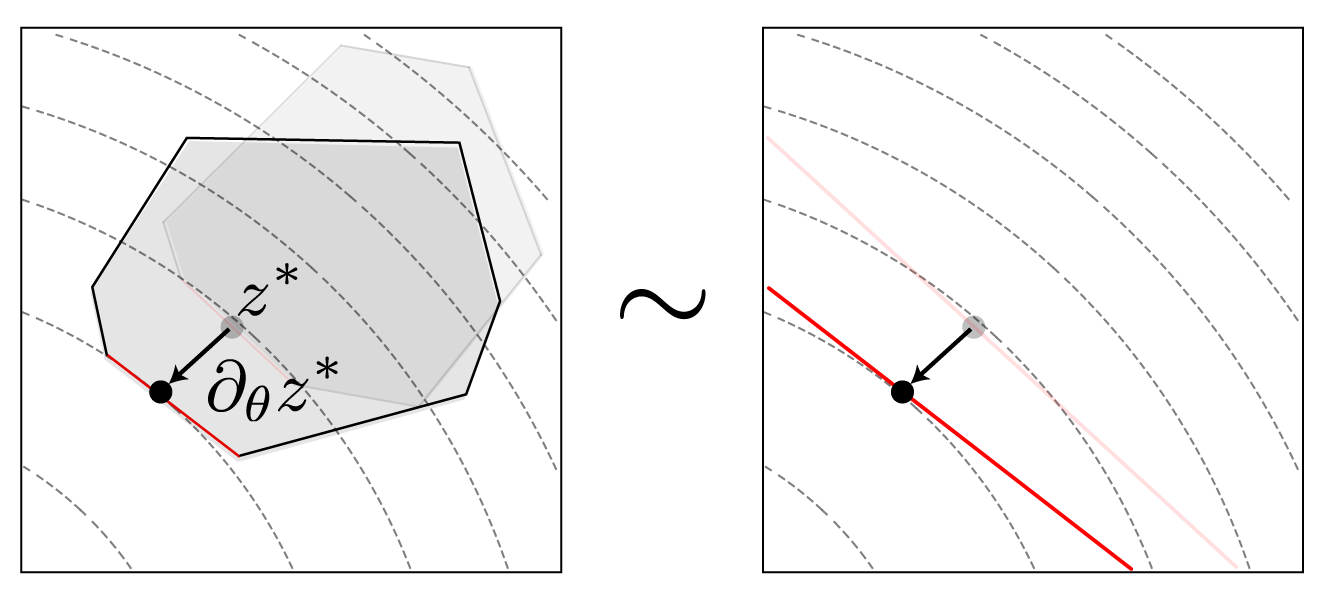
The key mathematical structure we use to aid modularity is the special polyhedral geometry of a QP. This is illustrated below, where a QP is locally equivalent to a purely equality constrained problem, i.e., both their solutions and derivatives match.
Options
While dQP described in the snippet above suppresses default options, dQP has the following tunable settings.
| Option | Meaning |
|---|---|
| qp_solver | QP solver (supported by [qpsolvers]). |
| lin_solver | Linear solver for the derivative (algorithm 1). |
| solve_type | Dense or sparse (CSC format). |
| eps_abs | Absolute tolerance on feasibility, optimality, etc. |
| eps_rel | Relative tolerance. |
| eps_active | Tolerance to decide the active set of constraints. |
| dual_available | Assert whether a given solver outputs duals, if not, solve for them. |
| normalize_constraints | Normalize each row of the constraints, so residuals are distances. |
| refine_active | Use heuristic active set refinement (Fig. 7) |
| warm_start_from_previous | Save previous solution and use to warm-start (useful in bilevel optimization) |
| omp_parallel | Use a simple parallel for loop for the forward over batches. |
| empty_batch | Include an empty batch dimension, even for batch 1. |
| qp_solver_keywords | Additional keywords for qpsolvers. |
| verbose | Display additional information. |
| time | Display timings. |
| check_PSD | Verify that Q is positive semi-definite (dense only), is costly. |
Which solver do I choose for my problem? First, we suggest perusing open-source benchmarks and the basic classes of QP solver. For more information, we include a simple diagnostic tool which iterates through available QP solvers and times the forward/backward solves of your example QP (Fig. 6).
Development Setup and Experiments
This script sets up the environment distributed with PyPI:
git clone https://github.com/cwmagoon/dQP
cd dQP
conda create -y --name dQP python=3.9
conda activate dQP
pip install -e .
This script includes this and provides additional dependencies used in the experiments:
git clone https://github.com/cwmagoon/dQP
cd dQP
conda create -y --name dQP python=3.9
conda activate dQP
pip install torch==2.3.0+cpu -f https://download.pytorch.org/whl/torch_stable.html scipy numpy qpsolvers
pip install clarabel cvxopt daqp ecos gurobipy highspy mosek osqp piqp proxsuite qpalm quadprog scs
pip install qdldl pypardiso
pip install optnet qpth cvxpylayers proxsuite
pip install matplotlib tensorboard pandas
pip install setproctitle
pip install torch_geometric torch_scatter torch_sparse -f https://data.pyg.org/whl/torch-2.3.0+cpu.html
pip install libigl polyscope shapely robust_laplacian torchvision==0.18
conda install -c conda-forge ffmpeg
We provide the code for our experiments in the experiments folder, including some additional directions on running them at the following:
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file libdqp-0.1.1.tar.gz.
File metadata
- Download URL: libdqp-0.1.1.tar.gz
- Upload date:
- Size: 31.8 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.12.7
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
385a77721af544141c2a2716ea84804b6e8b28976e160f3f74e6596aee397f7d
|
|
| MD5 |
90e0ec52547884743ee7431b563c39cd
|
|
| BLAKE2b-256 |
89e8cab3576c96e201b948d89607d2a41c4a58ad7a1d1c1370f4459c07b0964e
|
File details
Details for the file libdqp-0.1.1-py3-none-any.whl.
File metadata
- Download URL: libdqp-0.1.1-py3-none-any.whl
- Upload date:
- Size: 30.6 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.12.7
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
31d899e291a6faa93e253c2d08f02dc1b79c009ec5cbcf2b7d9f8a94a164d90c
|
|
| MD5 |
fe82d2b101ea94c273f2a982ce3cf617
|
|
| BLAKE2b-256 |
b883b0a84b1a671449916adaafcc6baba8a8138c53d39188013f500837f6c1d5
|







