Magentic robotics simulation including reinforcement learning environments based on MuJoCo

Project description
MagBotSim (Magnetic Robotics Simulation)
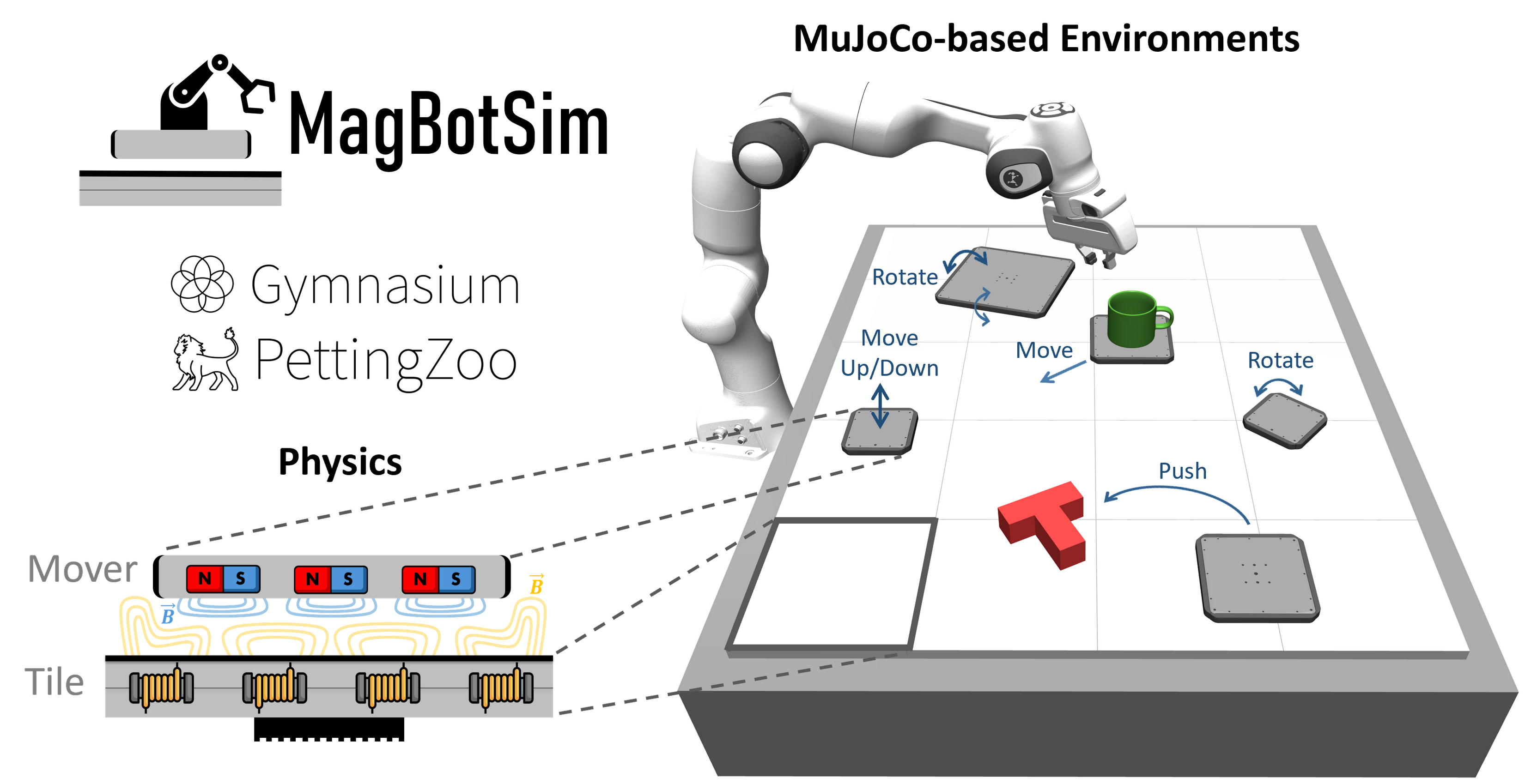
MagBotSim is a library for physics-based simulation environments for motion planning and object manipulation in the field of Magnetic Robotics. The main component of every environment is a magnetic levitation (MagLev) system, which consists of two basic components, as shown in the Figure above. Firstly, dynamically actuated shuttles as passive motor modules, so-called movers, consist of a housing and a complex permanent magnet structure based on Halbach arrays on the lower side of the mover. Secondly, static motor modules, so-called tiles, are the active component of the drive system. As shown in the Figure above, the tiles enable the coil-induced emission of electromagnetic fields (yellow) that interact with the mover's field (blue). During operation, the movers hover above the tiles and can be controlled in six dimensions by adjusting the currents in the coils contained in the tiles.
MagBotSim is designed to match real-world applications, so that control policies can be transferred to real MagLev systems without further training or calibration. Since the library is based on the MuJoCo physics engine, MagBotSim enables users to perform object manipulation tasks with MagLev systems. In addition, as reinforcement learning (RL) is frequently used in multi-agent path finding and object manipulation, MagBotSim includes basic environments with single-agent (Gymnasium) and multi-agent (PettingZoo Parallel API) RL APIs that can serve as starting points for developing new research-specific environments. However, MagBotSim can also be used without RL and provides several utilities, such as impedance control for the movers.
Installation
The MagBotSim package can be installed via PIP:
pip install magbotsim
To install optional dependencies, to build the documentation, or to run the tests, use:
pip install magbotsim[docs, tests]
Note: Depending on your shell (e.g. when using Zsh), you may need to use additional quotation marks:
pip install "magbotsim[docs, tests]"
Documentation
The documentation is available at: https://ubi-coro.github.io/MagBotSim/
License
MagBotSim is published under the GNU General Public License v3.0.
Reinforcement Learning Example
The following example shows how to use a trained policy with an environment that follows the Gymnasium API:
import gymnasium as gym
import magbotsim
gym.register_envs(magbotsim)
mover_params = {
'shape': 'mesh',
'mesh': {'mover_stl_path': 'beckhoff_apm4220_mover', 'bumper_stl_path': 'beckhoff_apm4220_bumper'},
'mass': 0.639 - 0.034,
'bumper_mass': 0.034,
}
env_kwargs = {
'mover_params': mover_params,
'initial_mover_zpos': 0.002,
'render_mode': 'human',
'render_every_cycle': True,
}
env = gym.make("StateBasedPushTEnv-v0", **env_kwargs)
observation, info = env.reset(seed=42)
for _ in range(0,100):
terminated, truncated = False, False
while not terminated and not truncated:
action = env.action_space.sample() # use custom policy instead
observation, reward, terminated, truncated, info = env.step(action)
observation, info = env.reset()
env.close()
Paper & Citation
If you use MagBotSim for your research, please cite our paper (https://arxiv.org/abs/2511.16158) as follows:
@aricle{bergmann_magbotsim_2025,
title = {{MagBotSim}: {Physics}-{Based} {Simulation} and {Reinforcement} {Learning} {Environments} for {Magnetic} {Robotics}},
author = {Bergmann, Lara and Grothues, Cedric and Neumann, Klaus},
journal = {arXiv preprint arXiv:2511.16158},
year = {2025},
doi = {10.48550/ARXIV.2511.16158}
}
Maintainer
MagBotSim is currently maintained by Lara Bergmann (@lbergmann1).


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file magbotsim-1.1.0.tar.gz.
File metadata
- Download URL: magbotsim-1.1.0.tar.gz
- Upload date:
- Size: 8.6 MB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.14.4
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
fcf81c3549a746f47bd41344547ceb3fff1c26ffeb4914812ce9259cb1c434f7
|
|
| MD5 |
2c02782d3aa6df55093b7d79a95e2b5e
|
|
| BLAKE2b-256 |
7252e3c12ce317ac95a9edb0c95854b51991d01fc2433d08b3972e09c6f8db87
|
File details
Details for the file magbotsim-1.1.0-py3-none-any.whl.
File metadata
- Download URL: magbotsim-1.1.0-py3-none-any.whl
- Upload date:
- Size: 8.7 MB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.2.0 CPython/3.14.4
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
664787e94117ab66acbca0535d7d64919f4d46c18f0814718bba90f8e85464ac
|
|
| MD5 |
4cb316051601d09ae025fb1e3781f130
|
|
| BLAKE2b-256 |
aad1dcdc934e09fadca05b97c2649eb51250b3620a434b1fa5fdb83b944a86de
|







