Calculate signed distance fields for arbitrary meshes

Project description
Calculate signed distance fields for arbitrary meshes
This project calculates approximate SDFs for triangle meshes. It works for non-watertight meshes (meshes with holes), self-intersecting meshes, meshes with non-manifold geometry and meshes with inconsistently oriented faces.
Install
pip3 install mesh-to-sdf
If you're using Windows or Mac, you need to work around a bug in pyrender. Check the FAQs below.
Examples
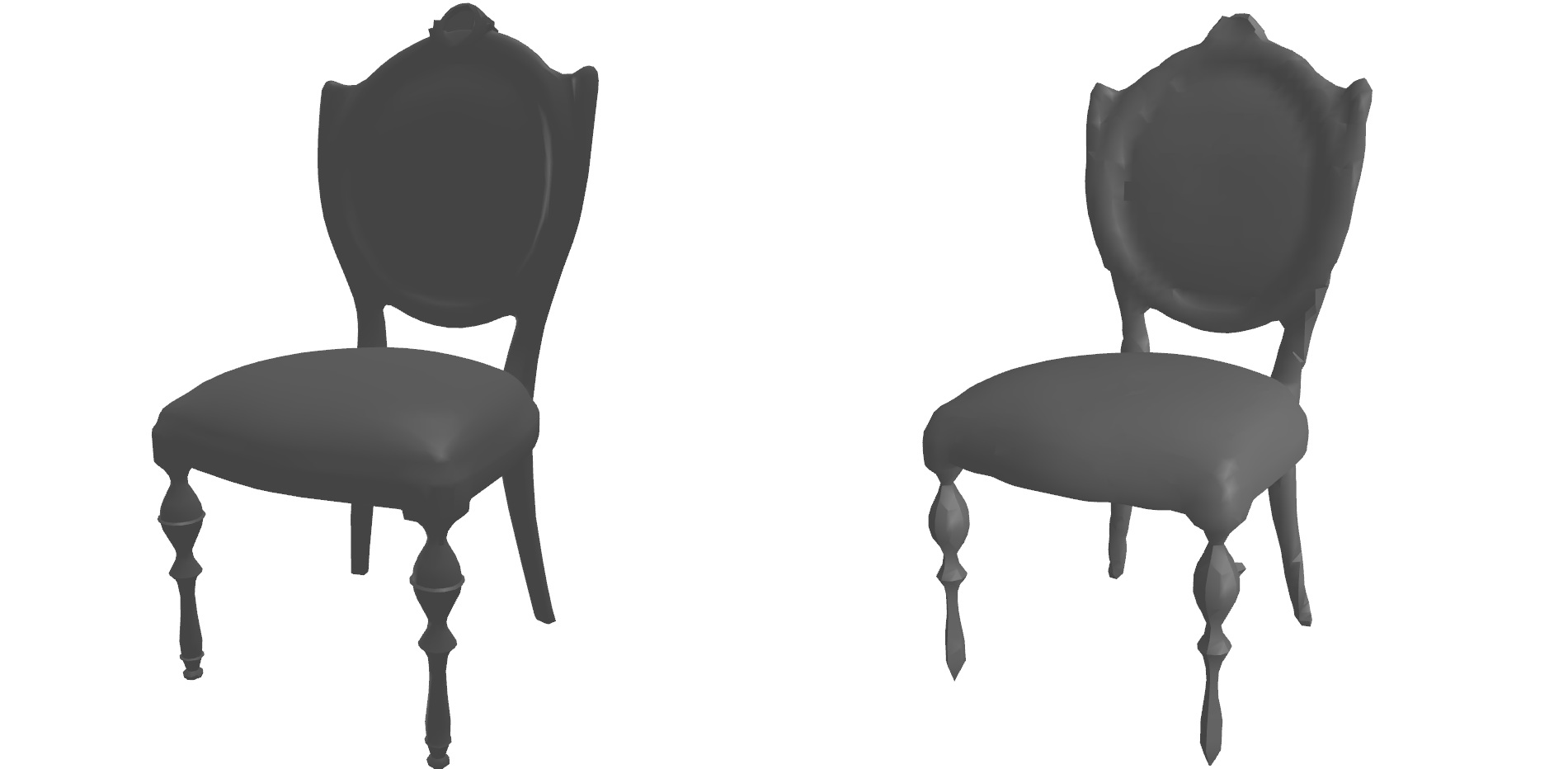
Voxelize a mesh
The mesh_to_voxels function creates an N ✕ N ✕ N array of SDF values.
In this example, a mesh is reconstructed using Marching Cubes and then rendered.
from mesh_to_sdf import mesh_to_voxels
import trimesh
import skimage
mesh = trimesh.load('chair.obj')
voxels = mesh_to_voxels(mesh, 64, pad=True)
vertices, faces, normals, _ = skimage.measure.marching_cubes(voxels, level=0)
mesh = trimesh.Trimesh(vertices=vertices, faces=faces, vertex_normals=normals)
mesh.show()
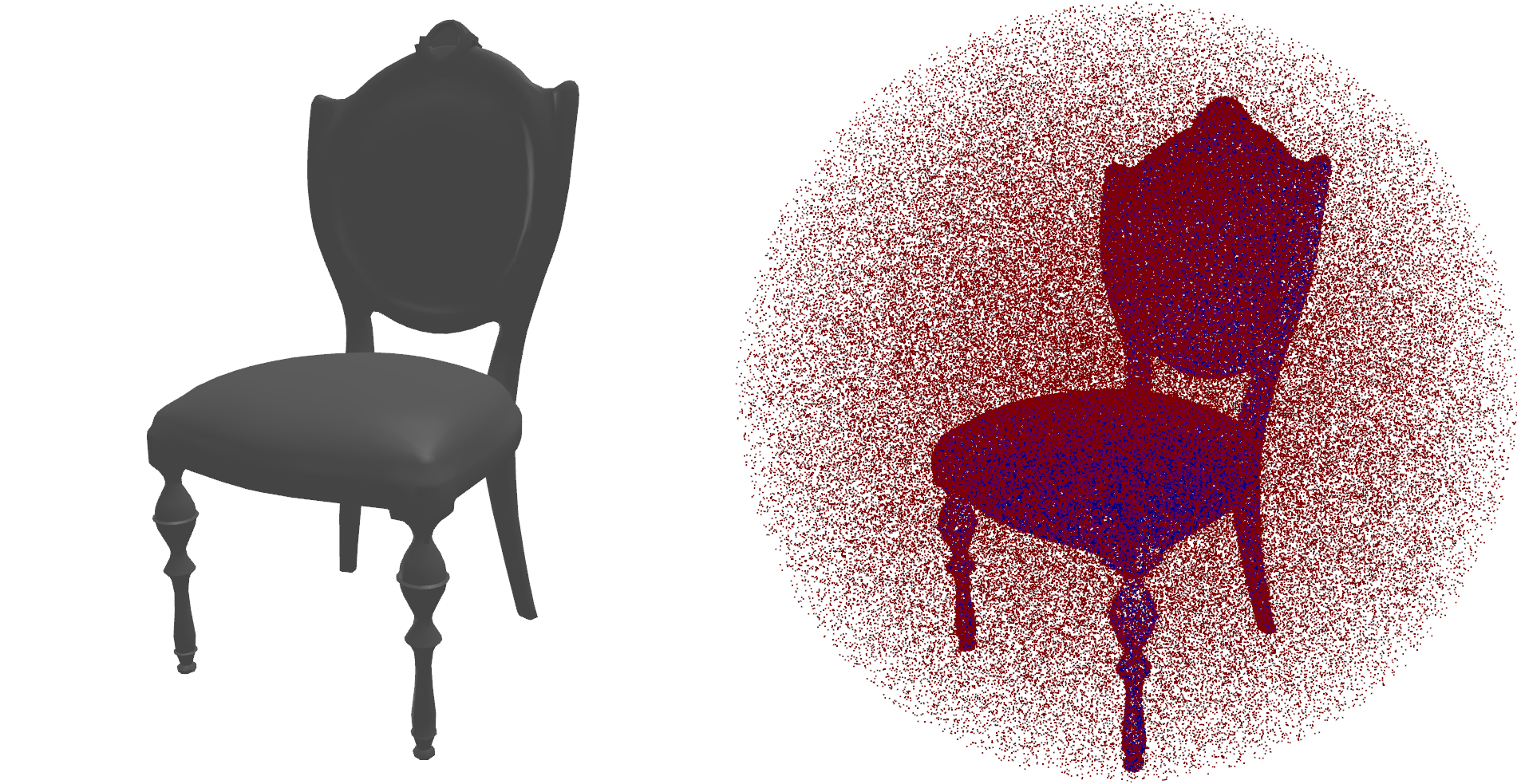
Sample SDF points non-uniformly near the surface
This example creates 250,000 points, where most of the points are close to the surface and some are sampled uniformly. This is the method that is proposed and used in the DeepSDF paper. In this example, the resulting points are rendered in red where the SDF is positive and in blue where it is negative.
from mesh_to_sdf import sample_sdf_near_surface
import trimesh
import pyrender
import numpy as np
mesh = trimesh.load('chair.obj')
points, sdf = sample_sdf_near_surface(mesh, number_of_points=250000)
colors = np.zeros(points.shape)
colors[sdf < 0, 2] = 1
colors[sdf > 0, 0] = 1
cloud = pyrender.Mesh.from_points(points, colors=colors)
scene = pyrender.Scene()
scene.add(cloud)
viewer = pyrender.Viewer(scene, use_raymond_lighting=True, point_size=2)
How it works
The general pipeline for calculating SDF in this project is as follows:
- Create 100 virtual laser scans of the shape from multiple angles. These each consist of a normal buffer and a depth buffer.
- Use the inverse MVP matrix and depth buffer of each scan to calculate a world-space surface point cloud
- Determine the value of the SDF for each query point by finding the closest surface point using a kd-tree
- Determine the sign of the SDF using either the normal of the closest surface point or by checking it against the depth buffers of the scans. When using normals, the sign is determined with a dot product. When using the depth buffer method, the point is projected in the frame of each render. By comparing the depth element of the depth buffer and depth of the query point, we determine if the query point is seen by the camera. The sign of the point is positive if it is seen by any of the cameras.
This repository contains an implementation of the procedure proposed in the DeepSDF paper, as well as some alternatives.
FAQ
Q: I'm getting this error: module 'pyglet.gl' has no attribute 'xlib'
This is due to a bug in pyrender. Possible workarounds:
- use
pyrender 0.1.30andpyglet 1.4.0b1(check this issue for more details) - manually edit
site-packages/pyrender/platforms/pyglet_platfform.pyand surround the content ofmake_uncurrentwith a try-catch block - use Linux instead of Windows or Mac. This problem appears because pyrender tries to use a library that is only available on Linux.
Q: I want to run this on a computer without a screen (ie. via SSH)
Add this to your script before importing mesh_to_sdf:
import os
os.environ['PYOPENGL_PLATFORM'] = 'egl'
Q: There are cone shaped artifacts in the SDF volume when using sign_method='normal'
This is a known issue.
To mitigate this, the signs are determined by checking a number of surface points and using a majority vote.
This problem can't be avoided entirely and increasing the number of points (normal_sample_count) even further doesn't seem to help.
In some cases, this problem appears when the mesh contains tiny triangles that face in a different direction than their surrounding area.
Smoothing the mesh doesn't seem to help.
The sign_method='depth' approach doesn't have this problem.
But it doesn't work with meshes that have holes.
Q: There are ray shaped artifacts in the SDF volume when using sign_method='depth'
This happens when the mesh has holes and a camera can see "inside" the mesh.
Use sign_method='normal' instead.
Q: This doesn't work!
This repository contains two approximate methods and in some cases they don't provide usable results.
When one of the methods fails, try the other one.
This can be automated by using the built-in ways to check if the result is plausible.
For the voxelizing methods, use check_result=True.
This checks if the difference in SDF is smaller than the difference in distance between any two points.
In sample_sdf_near_surface, you can add a volume check (min_size).
If these checks fail, a BadMeshException is thrown.
This method can process about 60% of the meshes in the ShapeNet dataset.
Documentation
mesh_to_sdf
Calculate signed distance values for an array of given query points
mesh_to_sdf.mesh_to_sdf(mesh, query_points, surface_point_method='scan', sign_method='normal', bounding_radius=None, scan_count=100, scan_resolution=400, sample_point_count=10000000, normal_sample_count=11)
Parameters
mesh: a trimesh meshquery_points: an N ✕ 3 numpy array, containing the points for which the signed distance function should be calculated.- See common parameters for the remaining parameters
Returns
- a numpy array with N elemenents, containing the SDF for each query point
mesh_to_voxels
Calculate an N ✕ N ✕ N voxel volume of signed distance values for a given mesh. The mesh is first transformed to fit inside a cube ranging from -1 to 1.
mesh_to_sdf.mesh_to_voxels(mesh, voxel_resolution=64, surface_point_method='scan', sign_method='normal', scan_count=100, scan_resolution=400, sample_point_count=10000000, normal_sample_count=11, pad=False, check_result=False, return_gradients=False)
Parameters
mesh: a trimesh meshvoxel_resolution: the resolution N of the resulting voxel volumepad: ifTrue, the resulting array is padded with ones, ensuring a mesh without holes when reconstructing with Marching Cubescheck_result: ifTrue, the result is checked for continuity. If the voxel volume is not a plausible signed distance field, an exception is thrown.- See common parameters for the remaining parameters
Returns
- a numpy array of shape (N, N, N) or (N + 2, N + 2, N + 2) when using padding
Returns additionally if return_gradients is True:
- gradients in a numpy array of shape (N, N, N, 3) or (N + 2, N + 2, N + 2, 3) when using padding
sample_sdf_near_surface
Sample some points uniformly and some points near the shape surface and calculate SDFs for these points. This follows the procedure proposed in the DeepSDF paper. The mesh is first transformed to fit inside the unit sphere.
mesh_to_sdf.sample_sdf_near_surface(mesh, number_of_points = 500000, surface_point_method='scan', sign_method='normal', scan_count=100, scan_resolution=400, sample_point_count=10000000, normal_sample_count=11, min_size=0, return_gradients=False)
Parameters
mesh: a trimesh meshnumber_of_points: the number N of points to be sampled, including surface points and uniform pointsmin_size: The fraction of uniformly sampled that should be inside the shape. If this is 0.015 and less than 1.5% of uniformly sampled points have negative SDFs, an exception is thrown. This can be used to detect bad meshes.- See common parameters for the remaining parameters
Returns
- an (N, 3) numpy array containing the sample points
- a numpy array of size N with the corresponding SDF values
Returns additionally if return_gradients is True:
- an (N, 3) numpy array containing the gradients
get_surface_point_cloud
Returns an intermediate data structure containing a surface point cloud, scans and a kd-tree of the point cloud. This can be used if SDFs will be calculated multiple times for the same mesh or for debugging.
mesh_to_sdf.get_surface_point_cloud(mesh, surface_point_method='scan', bounding_radius=1, scan_count=100, scan_resolution=400, sample_point_count=10000000, calculate_normals=True)
Parameters
mesh: a trimesh mesh- See common parameters for the remaining parameters
Returns
- an instance of
SurfacePointCloud
Common parameters
-
surface_point_method: The method to generate a surface point cloud. Either'scan'or'sample'. The scanning method creates virtual scans while the sampling method uses the triangles to sample surface points. The sampling method only works with watertight meshes with correct face normals, but avoids some of the artifacts that the scanning method creates. -
sign_method: The method to determine the signs of the SDF values. Either'normal'or'depth'. The normal method uses normals of the point cloud. It works better for meshes with holes, but sometimes results in "bubble" artifacts. The depth method avoids the bubble artifacts but is less accurate. -
bounding_radius: The radius of a sphere that contains all mesh vertices. IfNone, this value is calculated using the mesh. -
scan_count: Number of scans when using the scanning method -
scan_resolution: Resolution for the scans in pixels. -
sample_point_count: Number of points to sample when usingsurface_point_method='sample' -
normal_sample_count: Number of nearby surface points to check when usingsign_method='normal'. The sign of the resulting SDF is determined by majority vote.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file mesh-to-sdf-0.0.15.tar.gz.
File metadata
- Download URL: mesh-to-sdf-0.0.15.tar.gz
- Upload date:
- Size: 15.2 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.0.0 CPython/3.10.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
01c8985c8623aaaa2964dbc1de0513f5f9d6748c47a38eb1252cb087de07bd8e
|
|
| MD5 |
a620d84b2ed57d514dc8c1164dfd5749
|
|
| BLAKE2b-256 |
14c6de562197f77c392bb439b0abc220534502e10420d1cb693a0cfffb8031a2
|
File details
Details for the file mesh_to_sdf-0.0.15-py3-none-any.whl.
File metadata
- Download URL: mesh_to_sdf-0.0.15-py3-none-any.whl
- Upload date:
- Size: 14.5 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.0.0 CPython/3.10.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
bd487bef1461dd18e63b194879cd7177d9340fd1eaf61ed98b2efbe23c2180c6
|
|
| MD5 |
30ee5b906632f34aea1681b08d8892c9
|
|
| BLAKE2b-256 |
f753aeea1c533838656f638c6ceebadb556f48c6a132c16ef94062302c65442d
|







