Meteo-France's Artificial Intelligence Python Package
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers


Project description
MFAI: Météo-France's AI Python package







MFAI is a Python package that provides the following features:
- A variety of PyTorch Neural Network architectures (CNN, Vision Transformers, small LLMs, small mulitmodal LMs...) adapted to our needs, tested on our projects and datasets. For each architecture, we provide the reference to the original paper and source code if applicable and also the modifications we made.
- Per architecture schema validated settings using dataclasses-json
- A NamedTensor class to handle multi-dimensional data with named dimensions and named features (a single containing object for a tensor and its metadata)
- Various losses from the litterature, often tailored to our projects and experimental results
- Lightning module to speedup recurring tasks: segmentation, regression, DGMR training, ...
Use Cases
We solve a variety of AI modeling tasks applied to weather data using mfai, you can find some examples below of projects in production at Météo-France.
| Front Detection | Radar image artefact removal |
|---|---|
| UNetRPP for multiclass segmentation | UNet for binary segmentation |
 |
 |
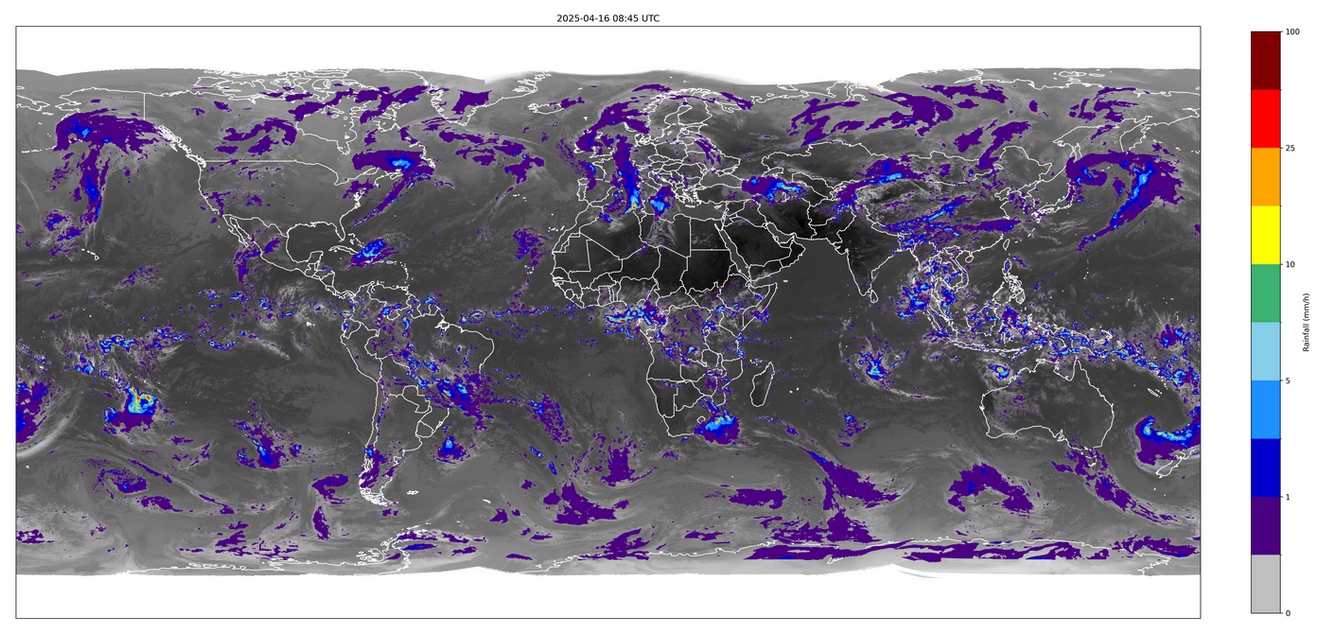
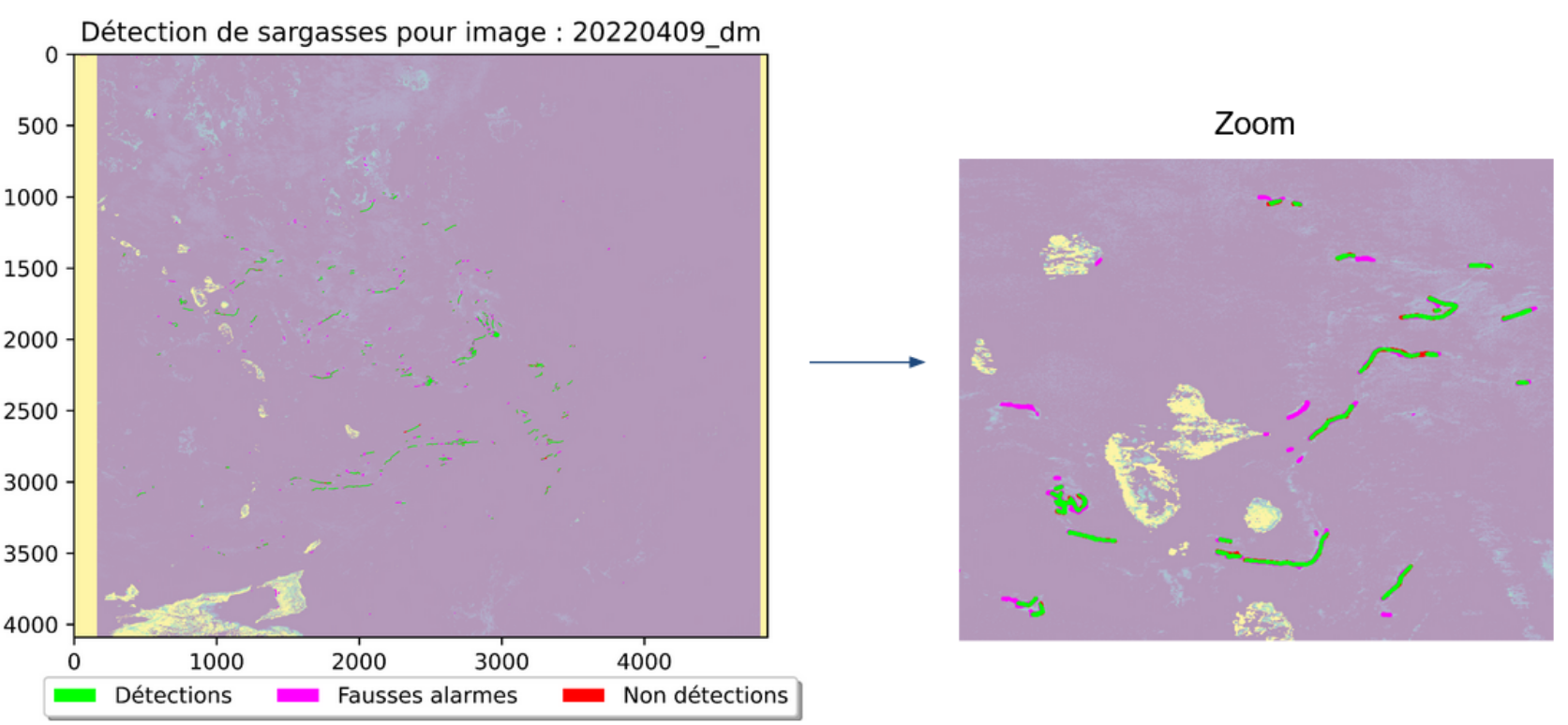
| Rainfall estimation from satellite channels | Macroalgae detection on satellite channels |
|---|---|
| HalfUnet for regression | HalfUnet for binary segmentation |
 |
 |
We also have past and ongoing R&D projects:
| LAM weather forecasting in py4cast (past) | Text generation from weather data |
|---|---|
| UNetRPP/HiLAM for regression | Fuyu for multimodal text generation |
 |
 |
If you are interested about the technical details of these projects (precise neural network architecture and hyperparameters, source code, ...) feel free to contact us. Most of our projects are proprietary but we can collaborate with other meteorological public institutions.
Package Documentation
The full package documentation is available at meteofrance.github.io/mfai.
Table of Content
-
- Convolutional Neural Networks:
- deeplabv3/deeplabv3+
- halfunet
- unet/customunet
- Resnet50, with a specific last stage to output multiple tokens (for MLM)
- Vision Transformers:
- segformer
- swinunetr
- unetr++
- PanguWeather
- ArchesWeather
- Generative Adversarial Networks:
- DGMR
- Graph Neural Networks:
- HiLAM
- GraphLAM
- Large Language Models (LLMs):
- GPT2 (classical and cross attention version)
- LLama2
- LLama3
- Multimodal Language Models (MLMs):
- A custom Fuyu inspired model with backend choice: GPT2, Llama2, Llama3
- A custom model combining a Resnet50 vision encoder with a cross attention GPT2
- Vision Language Models:
- CLIP
- Convolutional Neural Networks:
-
- Segmentation
- CLIP
- DGMR
-
- Critical Sucess Index
- False Alarm Rate
- False Negative Rate
- Precision-Recall Area Under Curve
-
- DiceLoss
- SoftCrossEntropyLoss
- SoftBCEWithLogitsLoss
- Perceptual loss
- LPIPS
- GridCell loss and Hinge losses for GANs
Neural Network Architectures
Currently we support the following neural network architectures:
Convolutional Neural Networks
| Model | Research Paper | Input Shape | ONNX exportable ? | Notes | Use-Cases at MF |
|---|---|---|---|---|---|
| DeepLabV3Plus | arxiv link | (Batch, features, Height, Width) | Yes | As a very large receptive field versus U-Net, Half-Unet, ... | Front Detection, Nowcasting |
| HalfUNet | researchgate link | (Batch, features, Height, Width) | Yes | In prod/oper on Espresso V2 with 128 filters and standard conv blocks instead of ghost | Satellite channels to rain estimation |
| UNet | arxiv link | (Batch, features, Height, Width) | Yes | Vanilla U-Net | Radar image cleaning |
| CustomUNet | arxiv link | (Batch, features, Height, Width) | Yes | U-Net like architecture with a variety of resnet encoder choices | Radar image cleaning |
| custom Resnet50 | arxiv link | (Batch, features, Height, Width) | Yes | A slightly customised Resnet50 outputing (batch, num_tokens, embed_dim) for multimodal LM weather/image encoding | Weather + text to text in MLMs |
Vision Transformers
| Model | Research Paper | Input Shape | ONNX exportable ? | Notes | Use-Cases at MF |
|---|---|---|---|---|---|
| Segformer | arxiv link | (Batch, features, Height, Width) | Yes | On par with u-net like on Deepsyg (MF internal), added an upsampling stage. Adapted from Lucidrains' github | Segmentation tasks |
| SwinUNetR | arxiv link | (Batch, features, Height, Width) | No | 2D Swin Unet transformer (Pangu and archweather uses customised 3D versions of Swin Transformers). Plugged in from MONAI. The decoders use Bilinear2D + Conv2d instead of Conv2dTranspose to remove artefacts/checkerboard effects | Segmentation tasks |
| UNetRPP | arxiv link | (Batch, features, Height, Width) or (Batch, features, Height, Width, Depth) | Yes | Vision transformer with a reduced GFLOPS footprint adapted from author's github. Modified to work both with 2d and 3d inputs. The decoders use Bilinear2D + Conv2d instead of Conv2dTranspose to remove artefacts/checkerboard effects | Front Detection, LAM Weather Forecasting |
| PanguWeather | arxiv link | (Batch, features, Height, Width) and (Batch, features, Height, Width, Depth) | Yes | 3D Earth-specific transformer based on Swin transformers adapted from author's github pseudo-code and implemented by Atos Eviden | (LAM) Weather Forecasting |
| ArchesWeather | arxiv link | (Batch, features, Height, Width) and (Batch, features, Height, Width, Depth) | Yes | 3D Earth-specific transformer using Pangu code with axial attention, based on author's repository and implemented by Atos Eviden | (LAM) Weather Forecasting |
| VIT | openreview link | (Batch, features, Height, Width) | Yes | VIT implementation slightly adapted from lucidrain's github | two flavours: Full sample/image classification + Vision encoding for MLMs |
Generative Adversarial Networks
| Model | Research Paper | Input Shape | ONNX exportable ? | Notes | Use-Cases at MF |
|---|---|---|---|---|---|
| DGMR | Nature | (batch time features height width) | No | Imported and adapted from OpenClimateFix | Training DGMR for precipitation nowcasting |
Graph Neural Networks
| Model | Research Paper | Input Shape | ONNX exportable ? | Notes | Use-Cases at MF |
|---|---|---|---|---|---|
| HiLAM, GraphLAM | arxiv link | (Batch, graph_node_id, features) | No | Imported and adapted from Joel's github |
Large Language Models
| Model | Research Paper | Input Shape | ONNX exportable ? | Notes | Use-Cases at MF |
|---|---|---|---|---|---|
| GPT2 | openai paper | (Batch, token_id) | No | Imported and adapted from Sebastian Raschka's book and github | |
| Llama2 | arxiv link | (Batch, token_id) | No | Imported and adapted from Sebastian Raschka's book and github | |
| Llama3 | arxiv link | (Batch, token_id) | No | Imported and adapted from Sebastian Raschka's book and github | |
| Custom GPT-2 with Cross Attention | (Batch, token_id, other) | No | Inspired from Sebastian Raschka's blog |
Multimodal Language Models
| Model | Research Paper | Input Shape | ONNX exportable ? | Notes | Use-Cases at MF |
|---|---|---|---|---|---|
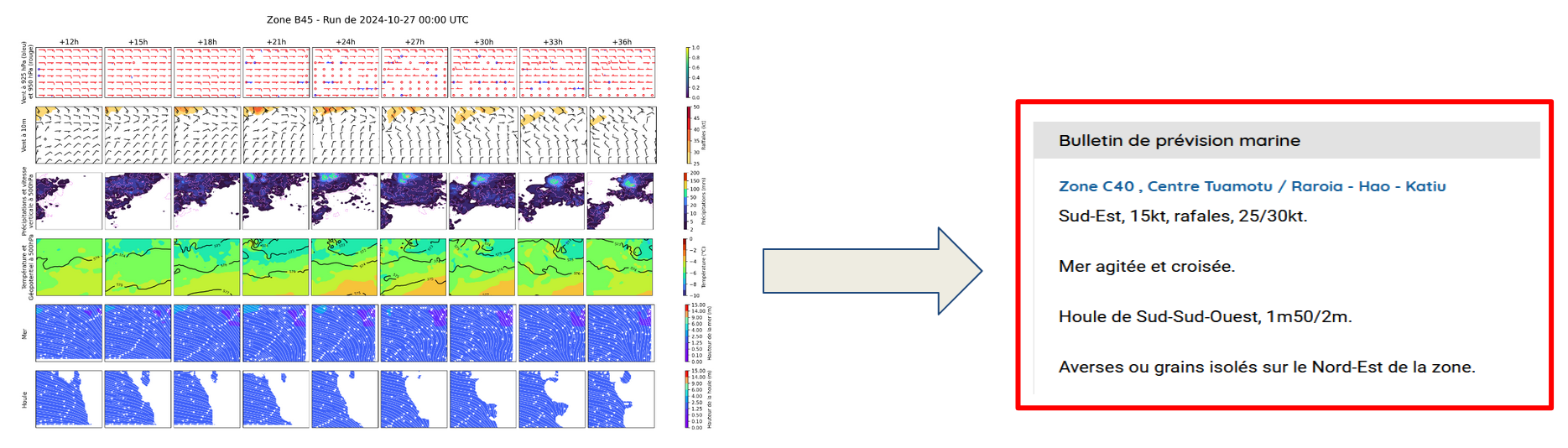
| Custom Fuyu Like Model | arxiv link | (Batch, token_id) for text, (Batch, Lat, Lon, Timestep, Features) for weather inputs | No | Inspired from Adept AI blog post and Sebastian Raschka's blog. We propose 3 different vision encoders: linear, resnet50, vit. Available llm backends: gpt2, llama2, llama3 | Marine text product generation |
| Custom Cross Attention weather + text MLM combining a resnet50 and a cross attention GPT-2 | (Batch, token_id) for text, (Batch, Lat, Lon, Timestep, Features) for weather inputs | No | Inspired from Sebastian Raschka's blog | Marine text product generation |
Vision Language Models
| Model | Research Paper | Input Shape | ONNX exportable ? | Notes | Use-Cases at MF |
|---|---|---|---|---|---|
| CLIP | arxiv link | (Batch, token_id) for text, (Batch, Features, Lat, Lon) | No | Usefull to pre-train a Vision Encoder | Marine text product generation |
Details about our models
Except for LLMs and MLLMs, each model we provide is a subclass of torch.nn.Module and can be used in a PyTorch training loop. It has multiple class attributes to facilitate model usage in a project:
- settings_kls: a class that defines the settings of the model (number of filters, kernel size, ...). It is used to instanciate the model with a specific configuration.
- onnx_supported: a boolean that indicates if the model can be exported to onnx. Our CI validates that the model can be exported to onnx and reloaded for inference.
- supported_num_spatial_dims: a tuple that describes the spatial dimensions of the input tensor supported by the model. A model that supports 2D spatial data will have (2,) as value. A model that supports 2d or 3d spatial data will have (2, 3) as value.
- num_spatial_dims: an integer that describes the number of spatial dimensions of the input/output tensor expected by the instance of the model, must be a value in supported_num_spatial_dims.
- settings: a runtime property returns the settings instance used to instanciate the model.
- model_type: an Enum describing the type of model: CONVOLUTIONAL, VISION_TRANSFORMER, GRAPH, LLM, MLLM.
- features_last: a boolean that indicates if the features dimension is the last dimension of the input/output tensor. If False, the features dimension is the second dimension of the input/output tensor.
- register: a boolean that indicates if the model should be registered in the MODELS registry. By default, it is set to False which allows the creation of intermediate subclasses not meant for direct use.
The Python interface contract for our model is enforced using Python ABC and in our case ModelABC class. This class is combined to torch.nn.Module in BaseModel.
@dataclass_json
@dataclass(slots=True)
class HalfUNetSettings:
num_filters: int = 64
dilation: int = 1
bias: bool = False
use_ghost: bool = False
last_activation: str = "Identity"
absolute_pos_embed: bool = False
class HalfUNet(BaseModel):
settings_kls = HalfUNetSettings
onnx_supported: bool = True
supported_num_spatial_dims = (2,)
num_spatial_dims: int = 2
features_last: bool = False
model_type: int = ModelType.CONVOLUTIONAL
register: bool = True
All models can be imported directly from the mfai.pytorch.models package. For example, to import the UNet model, you can use:
from mfai.pytorch.models import UNet
To instanciate a settings class for a model, you can use the settings_kls attribute of the model class. For example, to create a settings instance for the HalfUNet model and use it to instanciate the model, you can do:
from mfai.pytorch.models import HalfUNet
settings = HalfUNet.settings_kls(num_filters=128, use_ghost=True)
model = HalfUNet(in_channels=3, out_channels=2, input_shape=(64,64), settings=settings)
Lightning Modules
A Lightning Module is a high-level interface in PyTorch Lightning that encapsulates the model, training, validation, and testing logic, promoting modularity and ease of use in deep learning projects.
The module provides:
- customization for each stage of the training
- metrics and plot logging with tensorboard
- logging of configuration and hyperparameters
- computation of several metrics during validation stage
- test stage: compute metrics for each sample individualy and save them in CSV file
Obviously, if one of the implemented methods, metrics, etc. is not suitable for your problem, it is always possible to overload them so that the lightningmodule adapts to your needs.
Example:
We want here to log some figures in the TensorBoard, so we overload the default val_plot_step() method.
from mfai.pytorch.lightning_modules import SegmentationLightningModule
class MyProjectLightningModule(SegmentationLightningModule):
def val_plot_step(self, batch_idx, y, y_hat):
"""Log prediction made for the first image of batches (6, 14, 48, 78) in tensorboard."""
interesting_batches = [6, 14, 48, 78]
if batch_idx in interesting_batches:
fig = plot_pred_and_target(y=y[0], y_hat=y_hat[0])
tb = self.logger.experiment
tb.add_figure(f"val_plots/test_figure_{batch_idx}", fig, self.current_epoch)
Segmentation
We provide SegmentationLightningModule a lightning module adapted to supervised Deep Learning projects where the input of the neural network is made of one or multiple images and the target is also one or multiple images.
The module can be instanciated with any of the aforementioned vision neural networks architetures and used in 4 different modes : binary classification, multiclass classification, multilabel classification and regression.
By default, some metrics are computed in function of the mode of segmentation you use:
- Binary, Multiclass, Multilabel:
Accuracy,F1Score,Recall,Precision, - Regression:
MeanSquaredError,MeanAbsoluteError,MeanAbsolutePercentageError.
Clip
We also provide CLIPLightningModule, a lightning module dedicated to the training of CLIP models.
This module can be instanciated with a simple ClipSettings that informs which image and text encoders to use as well as the embedding size and the initial temperature.
DGMR
DGMRLightningModule is a Pytorch Lightning Module dedicated to training the DGMR model for precipitation nowcasting.
Code for the GAN architecture is here.
This lightning module is largely inspired by this work from OpenClimateFix.
To find an example of how to use it, check out this repository, where we train the DGMR model from scratch on French radar data.
Lightning CLI
Lightning CLI is a convenient way to easily configure your DL experiments and reduce the number of lines of code in your project.
We provide an example of usage of the Lightning CLI with our lightning module and an exemple of config file to launch an experiment.
NamedTensors
PyTorch provides an experimental feature called named tensors, at this time it is subject to change so we don't use it. That's why we provide our own implementation.
Our NamedTensor class is a wrapper around a PyTorch tensor that adds named dimensions and named features to the tensor. It is useful to handle multi-dimensional data with named dimensions and named features.
You can find the documentation of the NamedTensor class here.
Metrics
In addition to metrics available in torchmetrics, we implement :
- Criticall Sucess Index (CSI) is given by: TP / (TP+FP+FN). This metric, usefull in meteorology, takes into account both false alarms and missed events in a neighborhood to avoid the phenomenon of double penalty.
- False Alarm Rate (FAR) is given by: FP / (FP + TP).
- False Negative Rate (FNR) is given by: FN / (FN + TP).
- Precision-Recall Area Under the Curve (PR AUC). This metric summarize the overall performance of a model without depending on a threshold. It can be used in place of the Area Under ROC Curve when the dataset is too unbalanced.
Losses
Pytorch already provide some Loss like Mean Squared Error (torch.nn.MSELoss) or Mean Absolute Error (torch.nn.L1Loss). Here we add two loss functions that focus on perceptual similarity of tensors and four loss functions used for nowcasting with GANs (DGMR).
We also provide slightly modified losses (DiceLoss, SoftCrossEntropyLoss, SoftBCEWithLogitsLoss) adapted from pytorch-toolbet.
Perceptual Loss
It was introduced by Johnson et al. - Perceptual losses for real-time style transfer and super-resolution. (https://arxiv.org/pdf/1603.08155).
The PerceptualLoss class is a torch.nn.Module that allows to initialize a VGG-16 and compute directly the perceptual loss between a given input and target.
Multi Scale :
The VGG-16 was originally designed for ImageNet dataset that contains 224x224 images. It can still be used with image dimensionned differently. But in case your tensors are high dimensional (ex:1024x1024) the VGG-16 features might not be able to catch fine-scale details. The multi_scale mode allows to compute the Perceptual Loss on different downscale version of your original tensors. For example, if your tensors are 1024x1024, the perceptual loss will be computed both on the original dimension and on its downscaled versions : 512x512 and 256x256.
Channel handling case :
Because the VGG-16 was designed for RGB images, the perceptual loss can be computed differently depending on your tensors channel dimension.
The channel_iterative_mode is done so that the loss is iteratively computed by replicating three times each channel (RGB like) so that it is compatible with VGG-16 original architecture. \
(Case 1) : Tensors with N!=3 channels
(Case 1.1) : channel_iterative_mode=False :
The VGG-16 architecture is adapted so that it can forward tensors with N channels. There will be a single forward of the network per tensor to compute the features.
(Case 1.2) : channel_iterative_mode=True :
The original VGG-16 architecture is kept. There will be N forwards of the network per tensor to compute the features.
(Case 2) : Tensors with N=3 channels
(Case 2.1) : channel_iterative_mode=False :
The original VGG-16 architecture is kept. There will be a single forward of the network per tensor to compute the features.
(Case 2.2) : channel_iterative_mode=True :
The original VGG-16 architecture is kept. There will be N forwards of the network per tensor to compute the features.
Pre Trained
You can either choose to compute the Perceptual Loss with the ImageNet Pre-trained version of the VGG-16 or use a random version of it.
Example
An example of PerceptualLoss usage :
# In case the target and input are different everytime
inputs = torch.rand(25, 5, 128, 128)
targets = torch.rand(25, 5, 128, 128)
# Initialize the perceptual loss class
perceptual_loss_class = PerceptualLoss(channel_iterative_mode=True, in_channels=5)
# Computing Perceptual Loss
perceptual_loss = perceptual_loss_class(inputs, targets)
# In case you need to compare different targets to the same input
inputs = torch.rand(25, 5, 128, 128)
perceptual_loss_class = PerceptualLoss(channel_iterative_mode=True, in_channels=5)
# The features of the inputs are computed and stored in the memory
perceptual_loss_class.compute_perceptual_features(inputs)
for _ in range():
targets = torch.rand(25, 5, 128, 128)
# The features of the targets are computed and compared to the input features
perceptual_loss = perceptual_loss_class(targets)
LPIPS
The LPIPS class is a torch.nn.Module that computes the Learned Perceptual Image Patch Similarity metric. It is using the aforementionned PerceptualLoss class so it contains the same modes.
GANs losses for Nowcasting
We add the Grid Cell Regularizer loss from Skillful Nowcasting, as well as a Nowcating loss, Hinge discriminator loss and Hinge generator loss.
Transforms
We provide a RandomCropWithMinPositivePixels torch transforms to crop input and output tensor to a desired image size (512, 512) by default with a minimum percentage of positive valued pixels in y (output) or the best we found out of 5 retries otherwise. The goal of this transform is to address class imbalance in binary classification problems where positive labels are rare.
Installation
Cloning the repository
git clone https://github.com/meteofrance/mfai
cd mfai
pip install -e .
Using pip
You can install using pip trageting the main branch:
pip install mfai
If you want to target a specific version >= v6.2.1:
pip install mfai>=v6.2.1
Before version 6.2.1:
pip install git+https://github.com/meteofrance/mfai@v1.0.1
After version 7.0.0, mfai comes with optional dependencies for llm models.
To install them, add [llm] behind the pip installation instruction:
pip install .[dev]
# or
pip install mfai[llm]>=7.0.0
Usage
Instanciate a model
Our unit tests provides an example of how to use the models in a PyTorch training loop. Our models are instanciated with 2 mandatory positional arguments: in_channels and out_channels respectively the number of input and output channels/features of the model. A third input_shape parameter is either mandatory (UNETR++ or HalfUNet with absolute pos embedding) or optional for the other models. It describes the shape of the input tensor along its spatial dimensions.
The last parameter is an instance of the model's settings class and is a keyword argument with a default value set to the default settings.
Here is an example of how to instanciate the UNet model with a 3 channels input (like an RGB image) and 1 channel output with its default settings:
from mfai.pytorch.models import UNet
unet = UNet(in_channels=3, out_channels=1)
FEATURE: Once instanciated, the model (subclass of nn.Module) can be used like any standard PyTorch model.
In order to instanciate a HalfUNet model with a 2 channels inputs, 2 channels outputs and a custom settings (128 filters, ghost module):
from mfai.pytorch.models import HalfUNet
halfunet = HalfUNet(in_channels=2, out_channels=2, settings=HalfUNet.settings_kls(num_filters=128, use_ghost=True))
Finally, to instanciate a model with the mandatory input_shape parameter, here is an example with the UNETR++ model working on 2d spatial data (256x256) with 3 channels input and 1 channel output:
from mfai.pytorch.models import UNetRPP
unetrpp = UNetRPP(in_channels=3, out_channels=1, input_shape=(256, 256))
FEATURE: Each model has its settings class available under the settings_kls attribute.
You can use the load_from_settings_file function to instanciate a model with its settings from a json file:
from pathlib import Path
from mfai.pytorch.models import load_from_settings_file
model = load_from_settings_file(
"HalfUNet",
2,
2,
Path(".") / "mfai" / "config" / "models" / "halfunet128.json",
)
FEATURE: Use the load_from_settings_file to have the strictest validation of the settings.
Export to onnx
Our tests illustrate how to export and later reload a model to/from onnx. Here is an example of how to export a model to onnx:
from mfai.pytorch import export_to_onnx, onnx_load_and_infer
# Export the model to onnx assuming we have just trained a 'model'
export_to_onnx(model, "model.onnx")
# Load the onnx model and infer
output_tensor = onnx_load_and_infer("model.onnx", input_tensor)
Check the code of onnx_load_and_infer if you would like to load the model once and make multiple inferences.
SegmentationLightningModule
The lightning module can be instantiated and used in a forward pass as follows:
import torch
from torch import Tensor
from mfai.pytorch.models import UNet
from mfai.pytorch.lightning_modules import SegmentationLightningModule
arch = UNet(in_channels=1, out_channels=1, input_shape=[64, 64])
loss = torch.nn.MSELoss()
model = SegmentationLightningModule(arch, "binary", loss)
x = torch.randn((1, 1, 64, 64)).float()
model(x)
The script examples/train_oxford_pets.py provides an example of how to instantiate the ligthning module and the lightning Trainer and use them to train and test a model on the Oxford-IIIT Pet Dataset.
You can also look at our unit tests in tests/test_lightning.py for example of usage.
See pytorch lightning documentation for how to configure the Trainer and customize the module to suit your needs.
Add a new metric
The SegmentationLightningModule uses a MetricCollection to compute (and log) metrics over validation and test datasets. To add a new metric (should be torchmetrics.Metric), you just have to add the line below in your __init__.
class MyLightningModule(SegmentationLightningModule):
def __init__(
self,
model: ModelABC,
type_segmentation: Literal["binary", "multiclass", "multilabel", "regression"],
loss: Callable,
) -> None:
super().__init__(model, type_segmentation, loss)
self.metrics.add_metrics(AUROC(task="binary", thresholds=100))
Lightning CLI
Setting up lightning CLI is as easy as our examples/main_cli_dummy.py script:
from lightning.pytorch.cli import LightningCLI
from mfai.pytorch.dummy_dataset import DummyDataModule
from mfai.pytorch.lightning_modules import SegmentationLightningModule
def cli_main():
cli = LightningCLI(SegmentationLightningModule, DummyDataModule) # noqa: F841
if __name__ == "__main__":
cli_main()
Then launch your experiment with:
python examples/main_cli_dummy.py {fit, validate, test, predict} YOUR_MODEL_AND_TRAINER_ARGUMENTS
For instance:
python examples/main_cli_dummy.py fit --model.model=Segformer --model.type_segmentation=binary --model.loss=torch.nn.BCEWithLogitsLoss --model.model.in_channels=2 --model.model.out_channels=1 --model.model.input_shape=[64, 64] --optimizer=AdamW --trainer.fast_dev_run=True
python examples/main_cli_dummy.py test --ckpt_path logs/best.ckpt
To avoid very very long command lines, you can use a config file to setup your experiment:
For instance, see mfai/config/cli_fit_test.yaml:
seed_everything: true
model:
model:
class_path: mfai.pytorch.models.Segformer
init_args:
in_channels: 2
out_channels: 1
input_shape: [64, 64]
settings:
num_layers: 2
decoder_dim: 256
num_downsampling_chans: 32
type_segmentation: "binary"
loss: torch.nn.BCEWithLogitsLoss
data:
batch_size: 4
optimizer:
class_path: torch.optim.AdamW
init_args:
lr: 0.001
...
Then you can pass your config file as argument to the CLI:
python examples/main_cli_dummy.py fit --config mfai/config/cli_fit_test.yaml
You can override arguments of the config file or add new ones in the CLI:
python examples/main_cli_dummy.py fit --config mfai/config/cli_fit_test.yaml --optimizer.lr 0.0001 --trainer.fast_dev_run True
Don't be shy about using the CLI help tool! It can save you a lot of time:
runai python examples/main_cli_dummy.py fit --help (click to expand)
usage: main.py [options] fit [-h] [-c CONFIG] [--print_config[=flags]] [--seed_everything SEED_EVERYTHING] [--trainer CONFIG]
[--trainer.accelerator.help CLASS_PATH_OR_NAME] [--trainer.accelerator ACCELERATOR]
[--trainer.strategy.help CLASS_PATH_OR_NAME] [--trainer.strategy STRATEGY] [--trainer.devices DEVICES]
[--trainer.num_nodes NUM_NODES] [--trainer.precision PRECISION]
[--trainer.logger.help CLASS_PATH_OR_NAME] [--trainer.logger LOGGER]
[--trainer.callbacks.help CLASS_PATH_OR_NAME] [--trainer.callbacks CALLBACKS]
[--trainer.fast_dev_run FAST_DEV_RUN] [--trainer.max_epochs MAX_EPOCHS]
[--trainer.min_epochs MIN_EPOCHS] [--trainer.max_steps MAX_STEPS] [--trainer.min_steps MIN_STEPS]
[--trainer.max_time MAX_TIME] [--trainer.limit_train_batches LIMIT_TRAIN_BATCHES]
[--trainer.limit_val_batches LIMIT_VAL_BATCHES] [--trainer.limit_test_batches LIMIT_TEST_BATCHES]
[--trainer.limit_predict_batches LIMIT_PREDICT_BATCHES] [--trainer.overfit_batches OVERFIT_BATCHES]
[--trainer.val_check_interval VAL_CHECK_INTERVAL]
[--trainer.check_val_every_n_epoch CHECK_VAL_EVERY_N_EPOCH]
[--trainer.num_sanity_val_steps NUM_SANITY_VAL_STEPS] [--trainer.log_every_n_steps LOG_EVERY_N_STEPS]
[--trainer.enable_checkpointing {true,false,null}] [--trainer.enable_progress_bar {true,false,null}]
[--trainer.enable_model_summary {true,false,null}]
[--trainer.accumulate_grad_batches ACCUMULATE_GRAD_BATCHES]
[--trainer.gradient_clip_val GRADIENT_CLIP_VAL]
[--trainer.gradient_clip_algorithm GRADIENT_CLIP_ALGORITHM] [--trainer.deterministic DETERMINISTIC]
[--trainer.benchmark {true,false,null}] [--trainer.inference_mode {true,false}]
[--trainer.use_distributed_sampler {true,false}] [--trainer.profiler.help CLASS_PATH_OR_NAME]
[--trainer.profiler PROFILER] [--trainer.detect_anomaly {true,false}]
[--trainer.barebones {true,false}] [--trainer.plugins.help CLASS_PATH_OR_NAME]
[--trainer.plugins PLUGINS] [--trainer.sync_batchnorm {true,false}]
[--trainer.reload_dataloaders_every_n_epochs RELOAD_DATALOADERS_EVERY_N_EPOCHS]
[--trainer.default_root_dir DEFAULT_ROOT_DIR] [--model CONFIG] [--model.model.help CLASS_PATH_OR_NAME]
--model.model MODEL --model.type_segmentation {binary,multiclass,multilabel,regression}
--model.loss LOSS [--data CONFIG] [--data.batch_size BATCH_SIZE]
[--optimizer.help CLASS_PATH_OR_NAME] [--optimizer CONFIG | CLASS_PATH_OR_NAME | .INIT_ARG_NAME VALUE]
[--lr_scheduler.help CLASS_PATH_OR_NAME]
[--lr_scheduler CONFIG | CLASS_PATH_OR_NAME | .INIT_ARG_NAME VALUE] [--ckpt_path CKPT_PATH]
Runs the full optimization routine.
options:
-h, --help Show this help message and exit.
-c CONFIG, --config CONFIG
Path to a configuration file in json or yaml format.
--print_config[=flags]
Print the configuration after applying all other arguments and exit. The optional flags customizes the
output and are one or more keywords separated by comma. The supported flags are: comments, skip_default,
skip_null.
--seed_everything SEED_EVERYTHING
Set to an int to run seed_everything with this value before classes instantiation.Set to True to use a
random seed. (type: Union[bool, int], default: True)
Customize every aspect of training via flags:
--trainer CONFIG Path to a configuration file.
--trainer.accelerator.help CLASS_PATH_OR_NAME
Show the help for the given subclass of Accelerator and exit.
--trainer.accelerator ACCELERATOR
Supports passing different accelerator types ("cpu", "gpu", "tpu", "ipu", "hpu", "mps", "auto") as well as
custom accelerator instances. (type: Union[str, Accelerator], default: auto, known subclasses:
lightning.pytorch.accelerators.CPUAccelerator, lightning.pytorch.accelerators.CUDAAccelerator,
lightning.pytorch.accelerators.MPSAccelerator, lightning.pytorch.accelerators.XLAAccelerator)
--trainer.strategy.help CLASS_PATH_OR_NAME
Show the help for the given subclass of Strategy and exit.
runai python examples/main_cli_dummy.py fit --model.model.help mfai.pytorch.models.Segformer (click to expand)
usage: main.py --model.model.in_channels IN_CHANNELS --model.model.out_channels OUT_CHANNELS
--model.model.input_shape [ITEM,...] [--model.model.settings.dims [ITEM,...]]
[--model.model.settings.heads [ITEM,...]] [--model.model.settings.ff_expansion [ITEM,...]]
[--model.model.settings.reduction_ratio [ITEM,...]] [--model.model.settings.num_layers NUM_LAYERS]
[--model.model.settings.decoder_dim DECODER_DIM]
[--model.model.settings.num_downsampling_chans NUM_DOWNSAMPLING_CHANS]
Help for --model.model.help=mfai.pytorch.models.Segformer
Segformer architecture with extra:
--model.model.in_channels IN_CHANNELS
(required, type: int)
--model.model.out_channels OUT_CHANNELS
(required, type: int)
--model.model.input_shape [ITEM,...]
(required, type: Tuple[int, int])
SegformerSettings(dims: Tuple[int, ...] = (32, 64, 160, 256), heads: Tuple[int, ...] = (1, 2, 5, 8), ff_expansion: Tuple[int, ...] = (8, 8, 4, 4), reduction_ratio: Tuple[int, ...] = (8, 4, 2, 1), num_layers: int = 2, decoder_dim: int = 256, num_downsampling_chans: int = 32):
--model.model.settings.dims [ITEM,...]
(type: Tuple[int, ], default: (32, 64, 160, 256))
--model.model.settings.heads [ITEM,...]
(type: Tuple[int, ], default: (1, 2, 5, 8))
--model.model.settings.ff_expansion [ITEM,...]
(type: Tuple[int, ], default: (8, 8, 4, 4))
--model.model.settings.reduction_ratio [ITEM,...]
(type: Tuple[int, ], default: (8, 4, 2, 1))
--model.model.settings.num_layers NUM_LAYERS
(type: int, default: 2)
--model.model.settings.decoder_dim DECODER_DIM
(type: int, default: 256)
--model.model.settings.num_downsampling_chans NUM_DOWNSAMPLING_CHANS
(type: int, default: 32)
To help you write correctly your config file, use --print_config:
runai python examples/main_cli_dummy.py fit --model.model mfai.pytorch.models.Segformer --print_config (click to expand)
model:
model:
class_path: mfai.pytorch.models.Segformer
init_args:
in_channels: null
out_channels: null
input_shape: null
settings:
dims:
- 32
- 64
- 160
- 256
heads:
- 1
- 2
- 5
- 8
ff_expansion:
- 8
- 8
- 4
- 4
reduction_ratio:
- 8
- 4
- 2
- 1
num_layers: 2
decoder_dim: 256
num_downsampling_chans: 32
type_segmentation: null
loss: null
Metrics
As our metrics are subclasses of the torchmetrics.Metric class, you can both use them in a Pytorch or Pytorch Lightning model. Here is an example of how to set up a metric:
import torch
from torch import Tensor
from mfai.pytorch.metrics import CSINeighborood
preds = torch.rand(2, 2).softmax(dim=-1)
target = torch.randint(2, (2, 2))
csi_metric = CSINeighborhood(task="multiclass", num_classes=2, num_neighbors=0)
csi = csi_metric(preds, target)
Running Tests
Our tests are written using pytest. We check that:
- The models can be instantiated with their default parameters, trained on a toy problem, onnx exported and reloaded for inference.
- The NamedTensor class can be instantiated and used to manipulate data and metadata.
- The SegmentationLightningModule can be instantiated and used to make a train step and a forward step.
- The Ligthning CLI can be used for a "fast_dev" fit with command line arguments and a config file.
docker build . -f Dockerfile -t mfai
docker run -it --rm mfai python3 -m pytest tests
Contributing
We welcome contributions to this package. You can find a guide and contributing guidelines in the Contributing documentation.
Publishing
This package is built then published to pypi.org by the githhub workflow release.yml. This workflow is triggered when a tag is pushed to the main branch, and needs to be manualy authorised to run by one of the project's maintainers.
Citation
If you use this library in your research project, please cite it as below.
Météo-France, Berthomier L., Dewasmes O., Guibert F., Pradel B., Tournier T. mfai URL: https://github.com/meteofrance/mfai
Acknowledgements
This package is maintained by the AI Lab team at Météo-France. We would like to thank the authors of the papers and codes we used to implement the models (see above links to arxiv and github) and the authors of the libraries we use to build this package (see our requirements.txt).
Project details
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file mfai-7.1.3.tar.gz.
File metadata
- Download URL: mfai-7.1.3.tar.gz
- Upload date:
- Size: 736.5 kB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
3af3036ff177ab7dbeac5e1e1d60c73a399437402869b68fffebec81e5237421
|
|
| MD5 |
34ae92b557a475fd3a674dfc5059e2af
|
|
| BLAKE2b-256 |
49f8817f38ac69cd592bd4ac8acca5dcd663fbbc3c5af60db51bbb55ddd24e6f
|
Provenance
The following attestation bundles were made for mfai-7.1.3.tar.gz:
Publisher:
release.yml on meteofrance/mfai
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
mfai-7.1.3.tar.gz -
Subject digest:
3af3036ff177ab7dbeac5e1e1d60c73a399437402869b68fffebec81e5237421 - Sigstore transparency entry: 1283127149
- Sigstore integration time:
-
Permalink:
meteofrance/mfai@719879c06b00f4c3a69db2ea1d67a528863d1ae6 -
Branch / Tag:
refs/tags/v7.1.3 - Owner: https://github.com/meteofrance
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
release.yml@719879c06b00f4c3a69db2ea1d67a528863d1ae6 -
Trigger Event:
push
-
Statement type:
File details
Details for the file mfai-7.1.3-py3-none-any.whl.
File metadata
- Download URL: mfai-7.1.3-py3-none-any.whl
- Upload date:
- Size: 724.8 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
48cbfab059753ce632d58022c4ada86704cbaa10c87e41765b7a7fa9c39ebe18
|
|
| MD5 |
2bfa636d584e37d39354700da49618d2
|
|
| BLAKE2b-256 |
2b7f3e52dde6c38995932eae70f8f42e60389f0c6d6544962e80229ffc7b692a
|
Provenance
The following attestation bundles were made for mfai-7.1.3-py3-none-any.whl:
Publisher:
release.yml on meteofrance/mfai
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
mfai-7.1.3-py3-none-any.whl -
Subject digest:
48cbfab059753ce632d58022c4ada86704cbaa10c87e41765b7a7fa9c39ebe18 - Sigstore transparency entry: 1283127155
- Sigstore integration time:
-
Permalink:
meteofrance/mfai@719879c06b00f4c3a69db2ea1d67a528863d1ae6 -
Branch / Tag:
refs/tags/v7.1.3 - Owner: https://github.com/meteofrance
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
release.yml@719879c06b00f4c3a69db2ea1d67a528863d1ae6 -
Trigger Event:
push
-
Statement type:







