Simulation environment of task with autonomous mobile robot using Navigation Stack

Project description
navstack-gym
Simulation environment of task with autonomous mobile robot using Navigation Stack.
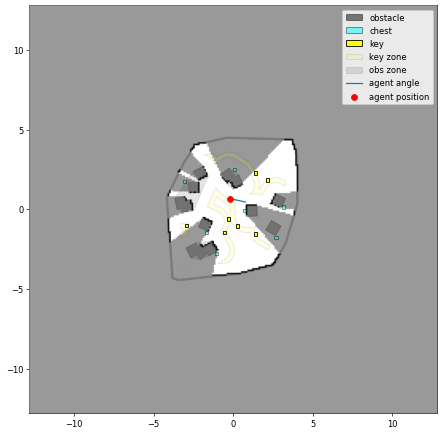
In this environment, the agent do action of instructing relative navigation goal pose and observe a subjective occupancy map.
Implemented Task
TreasureChestRoom :
Agent aim to open chests in unknown rooms with keys and discover as much treasure as possible.
The rooms in which agent spawned are randomly generated such as the following structure.
Yellow cube is key, and cyan cube is treasure chest. Each object will be generated based on different set of placing rules.

Installation
pip install navstack-gym
Usage
I'll add the note later.
example:
import gym
import navstack_gym
env = gym.make('VisibleTreasureHunt-v0')
obs = env.reset(is_generate_pose=True, is_generate_room=True, obstacle_count=10)
imgs = []
imgs.append(env.render('rgb_array'))
for i in range(10):
action = env.action_space.sample()
obs, reward, done, info = env.step(action)
imgs.append(env.render('rgb_array'))
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters







