An n-body simulator

Project description
Neural Body N-Body Simulator
Summary
An n-body simulator powered by a neural network.
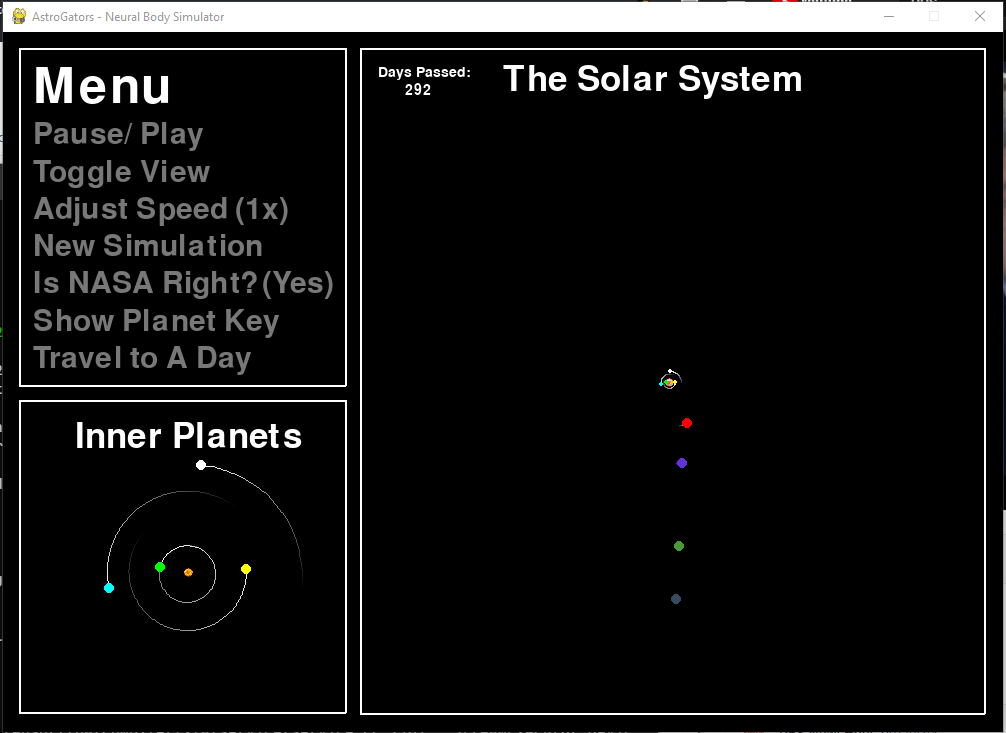
Neural Body is an n-body simulator is currently a demonstration of substituting calculations for planetary motion with a neural network. The user can choose from a selection of provided config files or modify config files with additional satellites and burn maneuvers.
Planets are calculated with physics while satellites use and LSTM neural network to predict what the satellite's next 20 time steps of displacement and velocity will look like given a sequence of 4 time steps. There is the option to ignore the neural network in the config file. The user might opt to do this since LSTM neural network inference is computationally intensive. Raw physics calculations are vectorized and should be more performant.
This is an example of the Jupyter notebooks written to train LSTM networks at various time steps: LSTM Neural Network Training
The data generation and manipulation into a format that the LSTM network could understand also took considerable time. This is a link to one of the example notebooks that took the raw HDF5 cache files produced by a data generating simulator and converted the raw data to a format the LSTM network could train on. Data Processing
Table of Contents
- Installation
- Usage
- Documentation
- Improvements Since Alpha
- Team
- License
Installation
Requirements
- Compatible debian-based Linux distro. Ubuntu 20.04 Preferred.
- Python 3.8 or higher.
- PyGame 2.0.0.dev10 or higher.
- TensorFlow 2.2.0
- Pandas 1.1.0
- Numpy 1.18.4
- xlrd
- h5py
- pynput
All dependencies above except for Python 3.8 should install when pip install is run.
Setup
Installing from .tar.gz:
- Download
neural_body-0.1.3.tar.gzfrom thedistdirectory. - Navigate to local folder where download is located.
- Use
pip install neural_body-0.1.3.tar.gz - Use the
neural_bodycommand to run the simulator from terminal.
Installing from PyPi:
- PyPi project page is located here
- Use
pip install neural-body - Use the
neural_bodycommand to run the simulator from terminal.
Usage
This selection includes an overview of all menu buttons and functionality of the simulator.
Pause / Play
The simulation can be paused at any point.
Toggle View
The simulation view can be toggled from overhead to side view.
Adjust Speed
The simulation can be sped up or slowed down.
New Simulation
WARNING: Obtaining stable burn maneuver sequences can take considerable time. Example configurations are included with the simulator for testing.
Simulation config files are Excel spreadsheets where the first sheet is the general simulation config where the user chooses to use the neural network or not.
Sheets to the right of the first sheet contain satellite configurations.
The user can modify the satellite sheets and add satellite sheets with the below parameters.
- Name: Name of the satellite.
- Mass: Mass of the satellite in kilograms.
- Altitude: Altitude of the satellite above earth.
- StartSpeed: Starting speed of the satellite in meters per second.
- MStart: Time step the maneuver occurs. Simulation time step is 6 hours. For example, to run a burn at day 4, multiply by 4 to get time step 16.
- DeltaVX, DeltaVY, DeltaVZ: X, Y, Z magnitudes of that particular burn maneuver in meters per second per second.
Burn maneuvers kept as time step units instead of day for programming finer-than-one-day burn maneuvers.
Burn maneuvers can be appended to the MStart, DeltaVX, DeltaVY, and DeltaVZ columns as needed.

Example config file is available for download here.
After you have your config file, it can be loaded into the simulator by
selecting "New Simulation", browsing to it and selecting the file. After selecting,
there will be a short delay while the simulator preps a simulation buffer.
Is NASA Right?
If you disagree with NASA, you can bring Pluto back as a planet.
Show Planet Key
Hovering over this option displays a color coded key of all planets in the system.
Travel to a Day
Selecting this option allows the user to rewind or fast forward the simulation by
entering the day they would like to jump to. There can be a heavier delay for
longer time step jumps as once the buffer is depleted, all intermediate time steps
must be calculated. At any point, the jump can be canceled by pressing the
escape key.
Documentation
To view the documentation online, go to the following URL:
Neural Body Sphinx Documentation
Documentation for the source compiled with Sphinx is included in the neural-body/0_demo-sim/docs/_build/html/
folder. You will need to download and host yourself by running python3 -m http.server --directory _build/html
Simulator and Neural Net Improvements Since Alpha
The simulator was originally base on the BenrulesRealTimeSim class, which creates a real time simulator of the sun, planets, pluto, and an arbitrary number of satellites. The initial simulation was forked from benrules2 on Github at the below link. https://gist.github.com/benrules2/220d56ea6fe9a85a4d762128b11adfba This simulator simulated a system for a fixed number of time steps and output the results to a custom class and dictionary.
v2 of the simulator converted it to a real time simulator using a Pandas dataframe to track simulation history and rewind back in time. It also used a feed-forward neural network that predicted the location of a specifically trained body given the positions of every other body. It also used dictionaries to store current simulation states and calculated steps from acceleration to velocity to displacement using loops. Overall, this presented the below challenges:
-
High memory usage. Since the simulation for all time was stored to a Pandas Dataframe in memory, this meant that as the simulation ran, the memory usage would continually grow.
-
Slow simulation computations. Many of the calculations used double and triple nested loops to calculte gravitational influence on a body and convert from the acceleration to velocity and velocity to displacement domains.
-
CPU idle time. Since all calculations were done at run time, the simulator would sit at idle rather than continuing to perform calculations in the background.
v3, while taking inspiration from the original benrules simulator, no longer resembles the original. v3 is extensible to an arbitrary number of satellites in the simulation. The LSTM neural net it uses relies on the body acceleration and current velocities to predict where the body will go for the next 20 time steps. The current behavior of the neural net is strange, which is why in the config files, there is an option to turn it off and rely on the simulator only. Much more feature engineering, data generation, and hyperparameter tuning is needed to accurately mimic orbital behavior. One of the main challenges that arose as well with the LSTM network is slower inference time. Without background processing and predicting multiple time steps at each inference, performance would be sub 3 fps. Because of this challenge and the v2 challenges, the below changes were made to v3.
-
Instead of using a Pandas dataframe that could require large amounts of memory with longer simulation durations, a new cache-archive system was developed to exchange simulation tracking between a numpy array that stores a sequence of 100 values in memory and an hdf5 file that stores a total record of the simulation so far. As time jumps are performed, trackers and functions handle the flushing of new values from the cache to the archive and loading of time steps from the archive. Having a history stored in numpy arrays also helps with vectorized computation since time steps don't need to be copied to other data structures for use in calculations.
-
Slow simulation computations were addressed by fully vectorizing all simulation computations using numpy linear algebra and getting rid of all computation loops. This vectorization was done while maintaining the capability to add an arbitrary number of bodies to the simulation. Slow inference time with the neural network was addressed by trying to predict 20 time steps ahead given a sequence of 4 time steps as input to an LSTM network. This enabled 1 inference cycle to produce 20 time steps.
-
Since the simulator is inherently a serial problem (in order to predict the next state, we must know the previous state), the team chose to address performance with a producer/consumer model that uses multiprocessing to continually run a producer in a background process that calculates future time steps even while the simulation is paused or when there is available CPU time on another processor. Main simulation calculations are moved to an external process that calculates future time steps. This process maintains a pre-queue of about 5000 future time steps. It feeds a queue of 100 time steps between the background process and the main simulator that provides positions to the front end. In order to reliably keep the main queue filled, the background process continually checks the main queue is filled with values from the pre-queue. It is able to continually perform this task since the calculations filling the pre-queue are launched and performed in a separate thread. This help mitigate the degradation of the buffer that the main queue provides.
In addition to the above improvements, benchmarking and queue monitoring are used to ensure that the system runs at a steady pace so that the simulator can keep up with frame requests. The user can burst to 2X or 4X, but if the queue begins to degrade, the simulator will automatically revert back to 1X. This is mainly for when the neural network is used. When not using the neural network, the simulator will usually set to a max framerate of 50 fps.
Team
The AstroGators formed as a result of the "CIS4930 - Performant Python Programming" course at the University of Florida developed by Jeremiah Blanchard
Team members include:
- Nathaniel Edgar
- Craig Boger
- Gary Jones
- Cory Robertson
- Andrew Sowinski
Nathaniel was team captain and worked on the burn maneuver system. Craig was responsible for the simulator backend design and data engineering for the neural net. Gary was the resident LSTM expert and worked on training and tuning of the LSTM neural network along with the previous generation feed-forward neural net. Andrew was the front-end and PyGame expert. Cory performed integration work between back end and front end along with front end timing tasks.
The Github repo for this demonstration is located at: https://github.com/nedgar76/neural-body/tree/final-sim/1_final-sim
License

- MIT license
- Copyright 2020 ©


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
File details
Details for the file neural_body-0.1.4.tar.gz.
File metadata
- Download URL: neural_body-0.1.4.tar.gz
- Upload date:
- Size: 3.0 MB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/3.2.0 pkginfo/1.5.0.1 requests/2.22.0 setuptools/45.2.0 requests-toolbelt/0.9.1 tqdm/4.46.1 CPython/3.8.2
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
b7cc080c89c985601f0bda85003c302cedc06ab94d9e3d46fcdc4e8fcae3522c
|
|
| MD5 |
167f0ba7ea2209ecdd92a6c8202a751e
|
|
| BLAKE2b-256 |
5a15056f3350c9ef315cddb9bec41138513d77cde84a9b81802e3b4b1e500657
|







