An optimizing IK solver based on the Lie group of rigid transforms SE(3)

Project description
OptIK





A fast inverse kinematics solver for arbitrary serial chains providing Rust, C++, and Python programming interfaces.
The implementation is similar to TRAC-IK [1] in that a nonlinear optimization problem is formulated and minimized. However, this work differs in a couple of ways:
- The gradient of the objective function is computed analytically. This is an immediate performance improvement over finite difference approaches, because it requires only one evaluation of the forward kinematics per gradient evaluation.
- Random restarting of the nonlinear solver is implemented in a work stealing parallel fashion, so that overall solve time is decreased thanks to the improved chance of finding a good seed.
- Random number generator seeds are carefully controlled in a way that produces deterministic results. (Note that this is only true in single-threaded mode, for now.)
- A parallel Newton's method solver is not included, because the performance of the full nonlinear problem is quite good on its own.
Benchmark [^1]
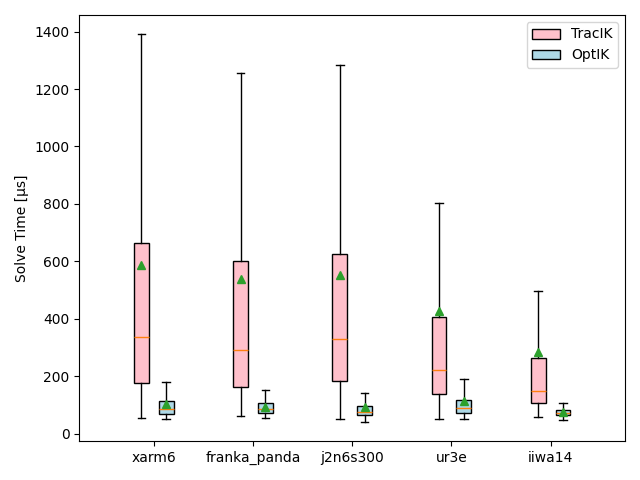
We compare to TRAC-IK (via tracikpy) by drawing a random valid joint configuration, mapping into Cartesian space with forward kinematics, and then asking each solver to generate an inverse kinematics solution using a random initial guess.
Note that this methodology differs from the original TRAC-IK benchmark which solves for configurations along a dense trajectory, meaning seeds are always relatively close. The benchmark shown below is more similar to a motion planning workload, in which samples are randomly drawn from a space with little knowledge of a nearby seed.
Timing is of a single inverse kinematics solve.
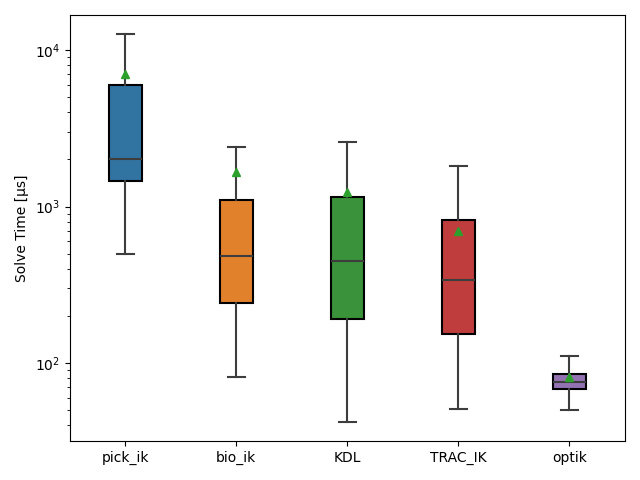
Additionally, we use the ik_benchmarking project (credit to PickNik Robotics) to compare against various solvers for the Franka Emika Panda robot using the MoveIt interfaces for each solver. OptIK is configured to return solutions with roughly equal tolerance to its closest competitor, TRAC-IK.
Timing is of a single inverse kinematics solve. Note the semi-log axes.
[^1]: as of https://github.com/kylc/optik/commit/3f324560b1a6ca5cfba2671e0180dd457ea1a28e
Setup
Python
python3 -m pip install optik-py
Or, to install a prerelease version:
- Download a recent
.whlfrom GitHub Releases - Run
pip install optik-py<...>.whl(replace<...>with the actual filename) - Test it:
python -c 'import optik'
C++ (CMake)
Include OptIK in your CMake project using FetchContent:
include(FetchContent)
FetchContent_Declare(
optik
GIT_REPOSITORY https://github.com/kylc/optik
GIT_TAG master
SOURCE_SUBDIR "crates/optik-cpp")
FetchContent_MakeAvailable(optik)
target_link_libraries(mylib PRIVATE optik::optik)
Building Locally
git clone git@github.com:kylc/optik.git
# Build the Rust library
cargo build --release
# Build a Python wheel
pip wheel .
# Build the C++ example
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release ../examples
cmake --build .
Application Notes
-
For workloads in which the distance between the solution and the seed are not important, you can use a high degree of parallelism to more quickly converge on a solution via parallel random restarting.
- OptIK defaults to the number of CPU cores for parallel solving. From testing (on an Intel i7-12700k), it has been observed that setting the parallelism level to half the logical core count generally gives the best results.
-
For workloads such as Cartesian interpolation, it is important to find the solution closest to the seed to avoid joint-space discontinuities. While OptIK does not explicitly try to minimize this distance, the optimizer does generally converge to the nearest solution (subject to joint limits). Prefer using
SolutionMode::Qualitywith parallelism to sample many solutions and choose the one nearest the seed.- Cartesian interpolation subject to joint constraints may be better served by Differential Inverse Kinematics. See the Python example for more information.
-
For workloads in which determinism is important, consider using
SolutionMode::Quality, settings amax_restartsvalue, and disabling themax_time. This ensures that the solution is not dependent on CPU processing speed or non-deterministic thread racing. Due to careful seeding of RNGs inside the solver, solutions should be fully deterministic. Alternatively, useSolutionMode::Speedand set the parallel threads to1.
References
P. Beeson and B. Ames, “TRAC-IK: An open-source library for improved solving of generic inverse kinematics,” in 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, South Korea: IEEE, Nov. 2015, pp. 928–935. doi: 10.1109/HUMANOIDS.2015.7363472.
J. Solà, J. Deray, and D. Atchuthan, “A micro Lie theory for state estimation in robotics.” arXiv, Dec. 08, 2021. Accessed: Jul. 24, 2023. [Online]. Available: http://arxiv.org/abs/1812.01537
Steven G. Johnson, The NLopt nonlinear-optimization package, http://github.com/stevengj/nlopt
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distributions
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file optik_py-0.5.0.tar.gz.
File metadata
- Download URL: optik_py-0.5.0.tar.gz
- Upload date:
- Size: 42.6 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: maturin/1.9.4
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
c30b16f9886689f492c3ca504fd14536eb9d181cb23b57f6d1ff37ee61b7737b
|
|
| MD5 |
ec630588d29a6fa313cb0e33a822b916
|
|
| BLAKE2b-256 |
91c1ed465eb0dc25117c1dc364db7b2a510e9734c6e7222c82ab367139fa8d00
|
File details
Details for the file optik_py-0.5.0-cp38-abi3-manylinux_2_17_x86_64.manylinux2014_x86_64.whl.
File metadata
- Download URL: optik_py-0.5.0-cp38-abi3-manylinux_2_17_x86_64.manylinux2014_x86_64.whl
- Upload date:
- Size: 916.3 kB
- Tags: CPython 3.8+, manylinux: glibc 2.17+ x86-64
- Uploaded using Trusted Publishing? No
- Uploaded via: maturin/1.9.4
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
2b938bcfea1a2e8193dcbad4cd34a13af0c0bee6f5d3fd2195fddc7fdb1b117c
|
|
| MD5 |
d6c59c0683ee0ae60adebfec895e273a
|
|
| BLAKE2b-256 |
aeadff0a8cca6543b8a2b26af63c87790da1d1bc52f28ad40ac7dc3af9fe2ae0
|
File details
Details for the file optik_py-0.5.0-cp38-abi3-manylinux_2_17_aarch64.manylinux2014_aarch64.whl.
File metadata
- Download URL: optik_py-0.5.0-cp38-abi3-manylinux_2_17_aarch64.manylinux2014_aarch64.whl
- Upload date:
- Size: 838.1 kB
- Tags: CPython 3.8+, manylinux: glibc 2.17+ ARM64
- Uploaded using Trusted Publishing? No
- Uploaded via: maturin/1.9.4
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
f5746eec05768f7ec2189fa9b1f329234211f400b46756c1076c5ab06b56c0ed
|
|
| MD5 |
d56e156b22d1a56e75bd9e21d7dc59d3
|
|
| BLAKE2b-256 |
478a922eb40e62c896de0a552feb1523c1b4cf4ca1a3f3feb3641563fae260ba
|
File details
Details for the file optik_py-0.5.0-cp38-abi3-macosx_10_12_universal2.whl.
File metadata
- Download URL: optik_py-0.5.0-cp38-abi3-macosx_10_12_universal2.whl
- Upload date:
- Size: 1.7 MB
- Tags: CPython 3.8+, macOS 10.12+ universal2 (ARM64, x86-64)
- Uploaded using Trusted Publishing? No
- Uploaded via: maturin/1.9.4
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
7ce367f6f2f37489a638c5e3b2d86bfb69e84a855068d527a022639b0f64a033
|
|
| MD5 |
51878d066f1cea5025a8b9f6ca281cbc
|
|
| BLAKE2b-256 |
081bcec56754bd4a8440c97b10f30f4de86126c6861fb59378a5c7364dacfce1
|







