Python driver for the Xiaomi CyberGear brushless motor over CAN bus
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers

Project description
cybergear




Python driver for the Xiaomi CyberGear brushless motor over CAN bus.
Built on top of python-can. Tested with SocketCAN; custom polling threads are used instead of BCM to support other python-can interfaces as well.
If you run into any issues, feel free to open an issue.
Full documentation: grrodre.github.io/cybergear
Features
- Five control modes: operation (MIT-style), position, speed, current, and quick-move
- Auto-scan: discovers motors on the bus without needing to specify a CAN ID
- Async feedback:
can.Notifier-based listener deliversMotorFeedbacksnapshots without blocking - Background polling: portable parameter polling thread keeps properties up to date on any interface
- Event callbacks: subscribe to feedback, parameter updates, and fault state changes
- Context-manager API: guarantees clean resource release
- Fault detection: decodes and monitors over-temperature, over-current, undervoltage, and encoder faults
Requirements
- Python 3.10+
- python-can ≥ 4.4.2
- A CAN interface supported by python-can (e.g. SocketCAN
can0at 1 Mbit/s)
Quick start
Scan for motors on the bus:
uvx --from python-cybergear cybergear-scan
Launch the dashboard:
uvx --from python-cybergear[dashboard] cybergear-dashboard
Installation
pip install python-cybergear
Or with uv:
uv add python-cybergear
To include the dashboard (requires Textual and Rich):
pip install python-cybergear[dashboard]
# or
uv add python-cybergear[dashboard]
CLI tools
Scan
Discover motors on the bus without writing any code:
cybergear-scan
cybergear-scan --interface socketcan --channel can0 --bitrate 1000000
Output:
Scanning CAN bus (timeout=0.5s)...
Found 1 motor(s):
CAN ID MCU Identifier
---------- --------------------
1 8c1a313130333104
Dashboard
Live TUI dashboard showing feedback, parameters, and quick motor controls (requires cybergear[dashboard]):
cybergear-dashboard
cybergear-dashboard --interface socketcan --channel can0 --bitrate 1000000 --can-id 1
Quick start
from cybergear import CyberGearMotor
bus_cfg = {'interface': 'socketcan', 'channel': 'can0', 'bitrate': 1_000_000}
with CyberGearMotor(bus_config=bus_cfg) as motor:
motor.run_mode = 'speed'
motor.enable()
motor.spd_ref = 5.0 # 5 rad/s
Pass can_id explicitly if you have multiple motors on the bus:
with CyberGearMotor(bus_config=bus_cfg, can_id=1) as motor:
...
You can also omit bus_config entirely and let python-can read from its configuration file (~/.can, can.ini, or environment variables):
# interface, channel, and bitrate are read from the python-can config file
with CyberGearMotor() as motor:
...
Control modes
Operation mode (MIT-style)
Directly command torque, position, velocity, and PD gains in a single frame:
motor.motor_control(torque=0.0, position=1.57, velocity=0.0, kp=10.0, kd=0.5)
Position mode
motor.run_mode = 'position'
motor.enable()
motor.loc_ref = 3.14 # rad
Speed mode
motor.run_mode = 'speed'
motor.enable()
motor.spd_ref = 10.0 # rad/s
Current mode
motor.run_mode = 'current'
motor.enable()
motor.iq_ref = 1.0 # A
Quick-move
motor.quick_move(speed=5.0) # rad/s
# ...
motor.quick_stop()
Reading motor state
Feedback is updated asynchronously from incoming CAN frames. Read the latest snapshot via motor.feedback:
fb = motor.feedback
print(fb.position, fb.velocity, fb.torque, fb.temperature)
print(fb.faults.has_fault)
Individual parameters polled in the background are also available as properties:
print(motor.mech_pos) # rad
print(motor.mech_vel) # rad/s
print(motor.v_bus) # V
Event listeners
Feedback listener
Called on every feedback frame in the can.Notifier thread. Keep callbacks fast.
def on_feedback(fb):
print(f'pos={fb.position:.3f} vel={fb.velocity:.3f}')
motor.add_feedback_listener(on_feedback)
motor.remove_feedback_listener(on_feedback)
Parameter listener
Called whenever a polled parameter read response arrives.
def on_param(name, value):
print(f'{name} = {value}')
motor.add_parameter_listener(on_param)
Fault listener
Called on any fault state transition (fault appears or clears).
def on_fault(faults):
if faults.has_fault:
print('FAULT:', faults)
motor.add_fault_listener(on_fault)
Bus scanning
Discover all motors on the bus without constructing a CyberGearMotor:
motors = CyberGearMotor.scan(bus_config=bus_cfg)
for can_id, device_id in motors:
print(f'found motor can_id={can_id} device_id={device_id.hex()}')
Motor limits
| Parameter | Min | Max |
|---|---|---|
| Position | −12.5 rad | +12.5 rad |
| Velocity | −30 rad/s | +30 rad/s |
| Torque | −12 Nm | +12 Nm |
| Kp | 0 | 500 |
| Kd | 0 | 5 |
API reference
CyberGearMotor
| Method / Property | Description |
|---|---|
enable() |
Arm the motor (clears latched faults) |
disable() |
Disarm the motor gracefully |
emergency_brake() |
Cut torque immediately |
motor_control(torque, position, velocity, kp, kd) |
MIT-style operation mode frame |
quick_move(speed) / quick_stop() |
Simple velocity motion |
reset_zero_position() |
Set current position as zero |
encoder_calibration(timeout=30.0) |
Trigger encoder calibration; returns electrical offset (float) |
run_mode |
Get/set run mode ('operation', 'position', 'speed', 'current') |
feedback |
Latest MotorFeedback snapshot |
scan(bus_config, ...) |
Class method: scan bus for motors |
start_polling(interval) / stop_polling() |
Control background parameter polling |
close() |
Release CAN bus and all resources |
MotorFeedback
| Field | Unit | Range |
|---|---|---|
position |
rad | ±12.5 |
velocity |
rad/s | ±30 |
torque |
Nm | ±12 |
temperature |
°C | * |
mode |
int | 0 Reset, 1 Cal, 2 Run |
faults |
FaultState |
* |
FaultState
| Field | Description |
|---|---|
has_fault |
True if any fault is active |
over_temperature |
Motor over-temperature |
over_current |
Over-current protection |
undervoltage |
Supply undervoltage |
hall_encoding_failure |
Hall sensor fault |
magnetic_encoding_failure |
Magnetic encoder fault |
calibrated |
False if encoder not calibrated |
Development
git clone https://github.com/grrodre/cybergear.git
cd cybergear
uv sync --dev
Run tests (excluding hardware tests):
uv run pytest -m "not hardware"
Hardware tests require a physical motor connected via CAN:
uv run pytest -m hardware
Lint and format:
uv run ruff check src/ tests/
uv run ruff format src/ tests/
uv run ty check
Hardware
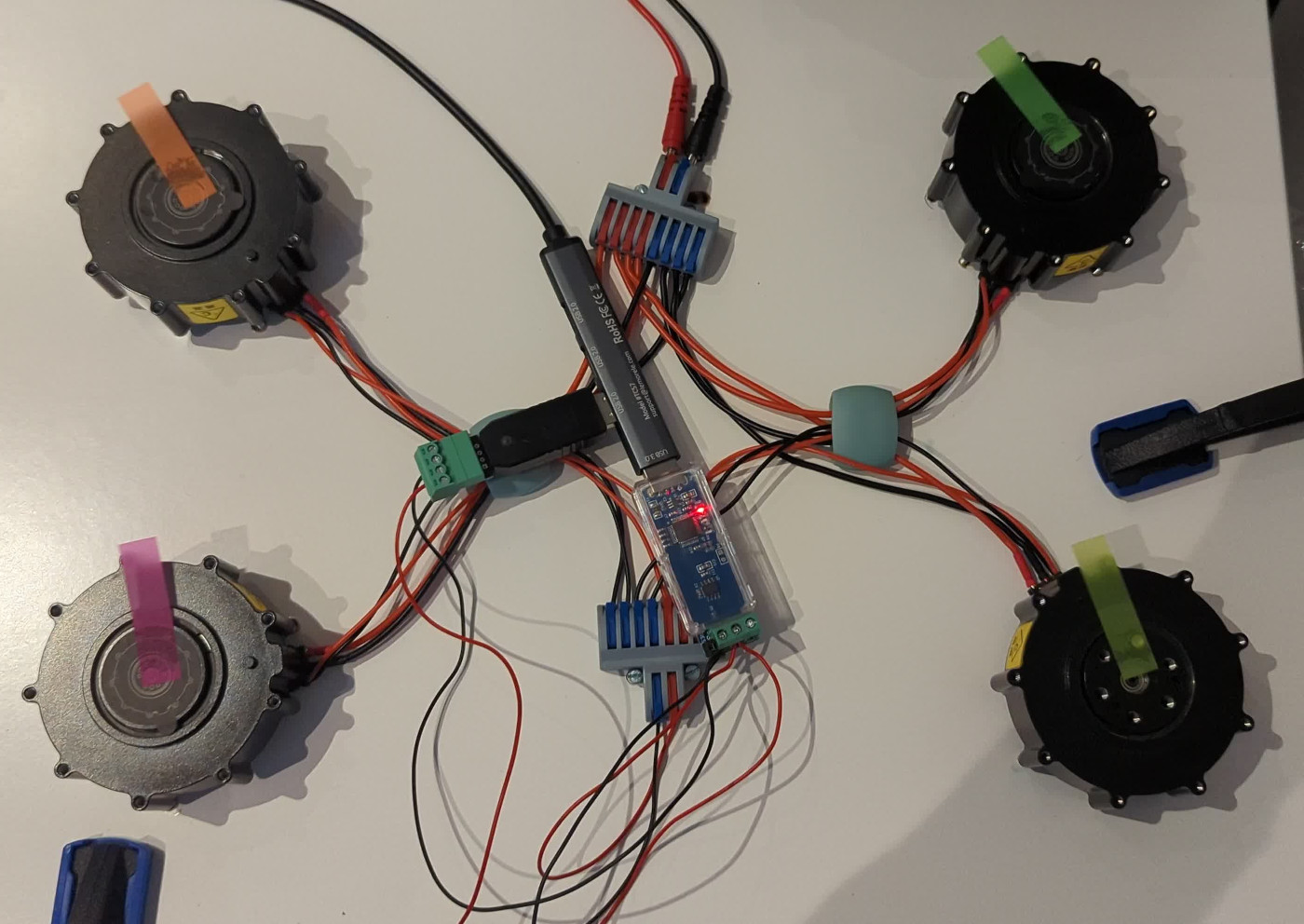
CAN USB adapter

Used to connect the CAN bus to a PC via USB. Bring up the interface at 1 Mbit/s:
sudo ip link set can0 type can bitrate 1000000
sudo ip link set can0 up
Motor cable
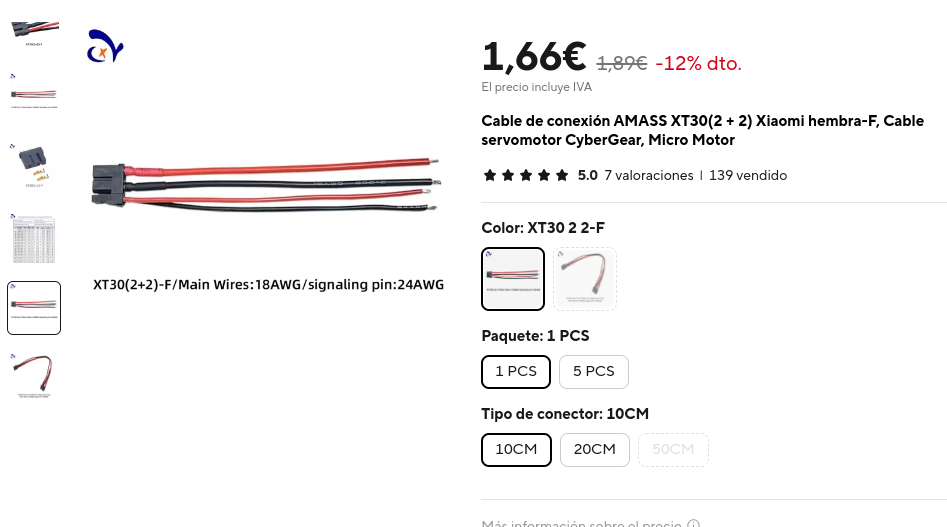
Power + signal cable required to connect the CyberGear motor (XT30 connector, 18 AWG power wires, 24 AWG signal wires).
Author
Gregorio Rodrigo - grrodre@gmail.com
License
MIT, see LICENSE.
Project details
Verified details
These details have been verified by PyPIProject links
GitHub Statistics
Maintainers
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file python_cybergear-0.1.2.tar.gz.
File metadata
- Download URL: python_cybergear-0.1.2.tar.gz
- Upload date:
- Size: 2.1 MB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
879f0bc14f0ceb6f557de39ef1f00bc3b2b3ffb747a8a7b679ad4e3ca7be4047
|
|
| MD5 |
db01d2e08e81b16a8a09a1ed9c6c82bb
|
|
| BLAKE2b-256 |
26d62d4b1a7480a7b81edf0ac4786e2f28bf6c03d9be421259eafbd6f42cfc59
|
Provenance
The following attestation bundles were made for python_cybergear-0.1.2.tar.gz:
Publisher:
publish.yml on grrodre/cybergear
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
python_cybergear-0.1.2.tar.gz -
Subject digest:
879f0bc14f0ceb6f557de39ef1f00bc3b2b3ffb747a8a7b679ad4e3ca7be4047 - Sigstore transparency entry: 1351728675
- Sigstore integration time:
-
Permalink:
grrodre/cybergear@fbbd681069ca5266e08e800435c075c5b7446b33 -
Branch / Tag:
refs/tags/v0.1.2 - Owner: https://github.com/grrodre
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@fbbd681069ca5266e08e800435c075c5b7446b33 -
Trigger Event:
push
-
Statement type:
File details
Details for the file python_cybergear-0.1.2-py3-none-any.whl.
File metadata
- Download URL: python_cybergear-0.1.2-py3-none-any.whl
- Upload date:
- Size: 21.0 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.13.12
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d66003d200ba69e4f8d124d3cb89026224c21cb283d856b5843c378d605cc43c
|
|
| MD5 |
50a14ab88eb471589deb5c7a8d21ff50
|
|
| BLAKE2b-256 |
fa4048b7a104b6e8a538f1f71a6325c8bb67a8232ccc74a5b29d8092b5cbda8e
|
Provenance
The following attestation bundles were made for python_cybergear-0.1.2-py3-none-any.whl:
Publisher:
publish.yml on grrodre/cybergear
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
python_cybergear-0.1.2-py3-none-any.whl -
Subject digest:
d66003d200ba69e4f8d124d3cb89026224c21cb283d856b5843c378d605cc43c - Sigstore transparency entry: 1351728768
- Sigstore integration time:
-
Permalink:
grrodre/cybergear@fbbd681069ca5266e08e800435c075c5b7446b33 -
Branch / Tag:
refs/tags/v0.1.2 - Owner: https://github.com/grrodre
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@fbbd681069ca5266e08e800435c075c5b7446b33 -
Trigger Event:
push
-
Statement type:







