360 degree image manipulation and conversion utilities for PyTorch.

Project description
📷 PyTorch 360° Image Conversion Toolkit

Overview
This PyTorch-based library provides powerful and differentiable image transformation utilities for converting between different panoramic image formats:
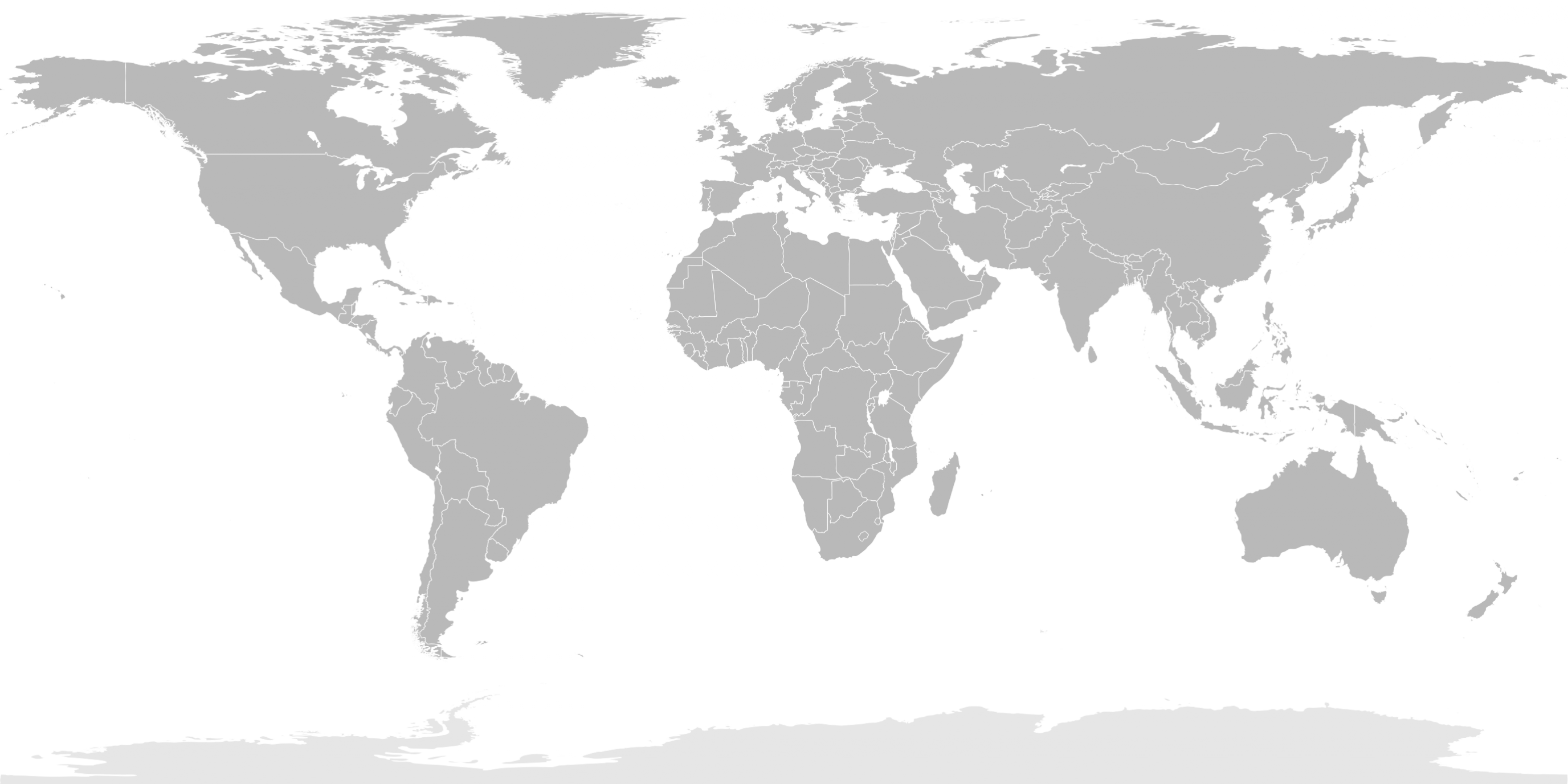
- Equirectangular (360°) Images
- Cubemap Representations
- Perspective Projections
Built as an improved PyTorch implementation of the original py360convert project, this library offers flexible, CPU & GPU-accelerated functions.
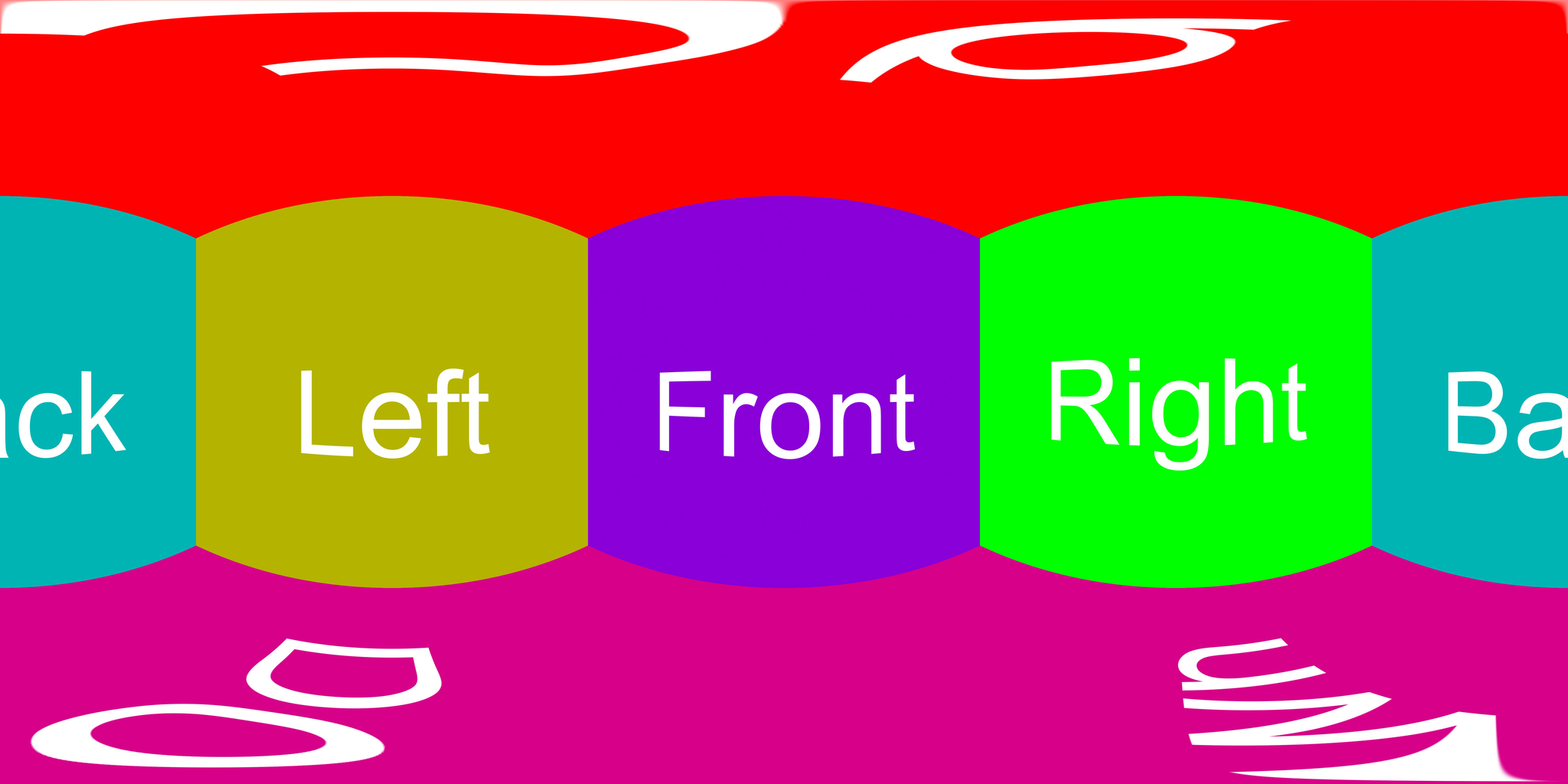
- Equirectangular format
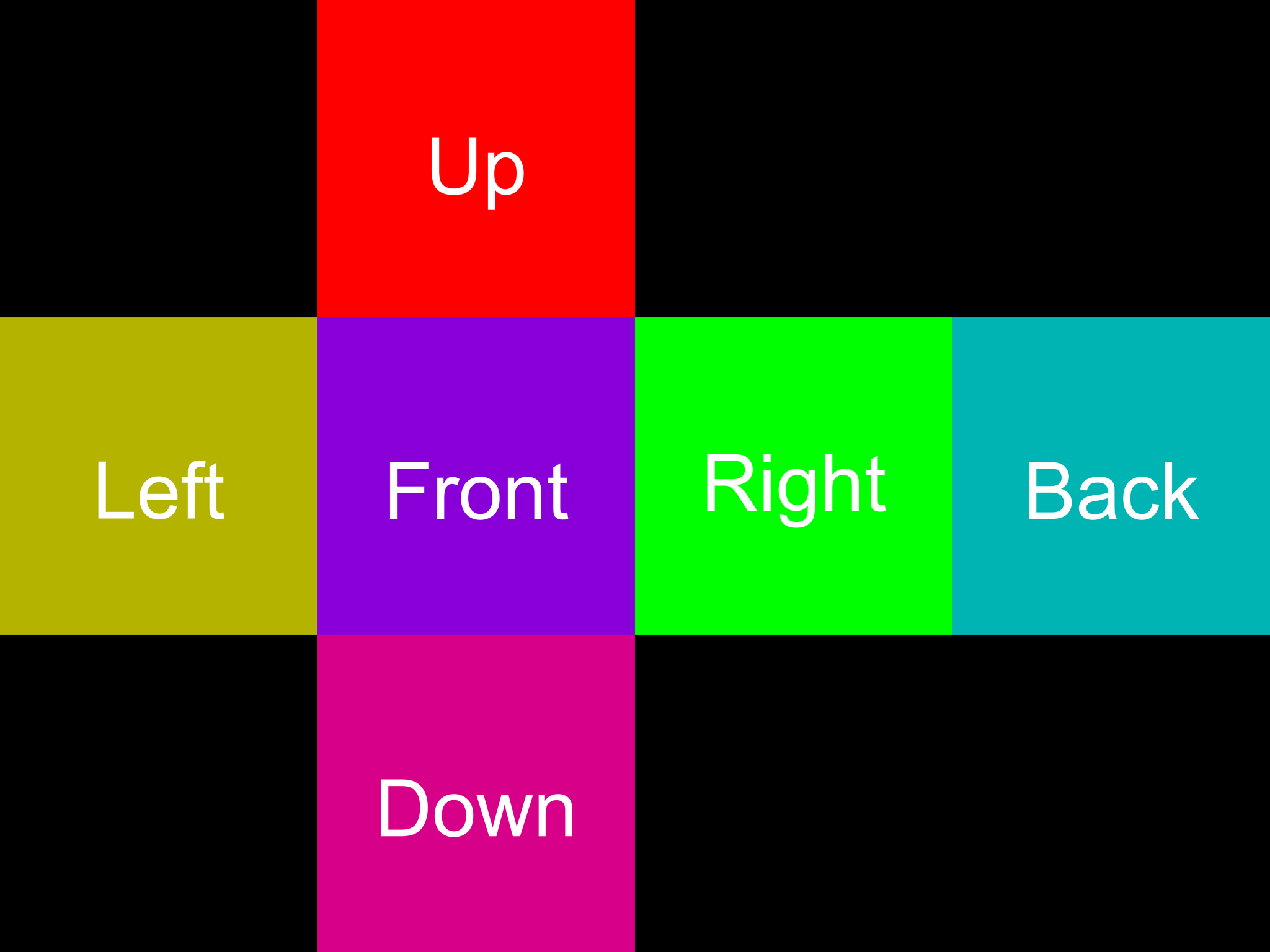
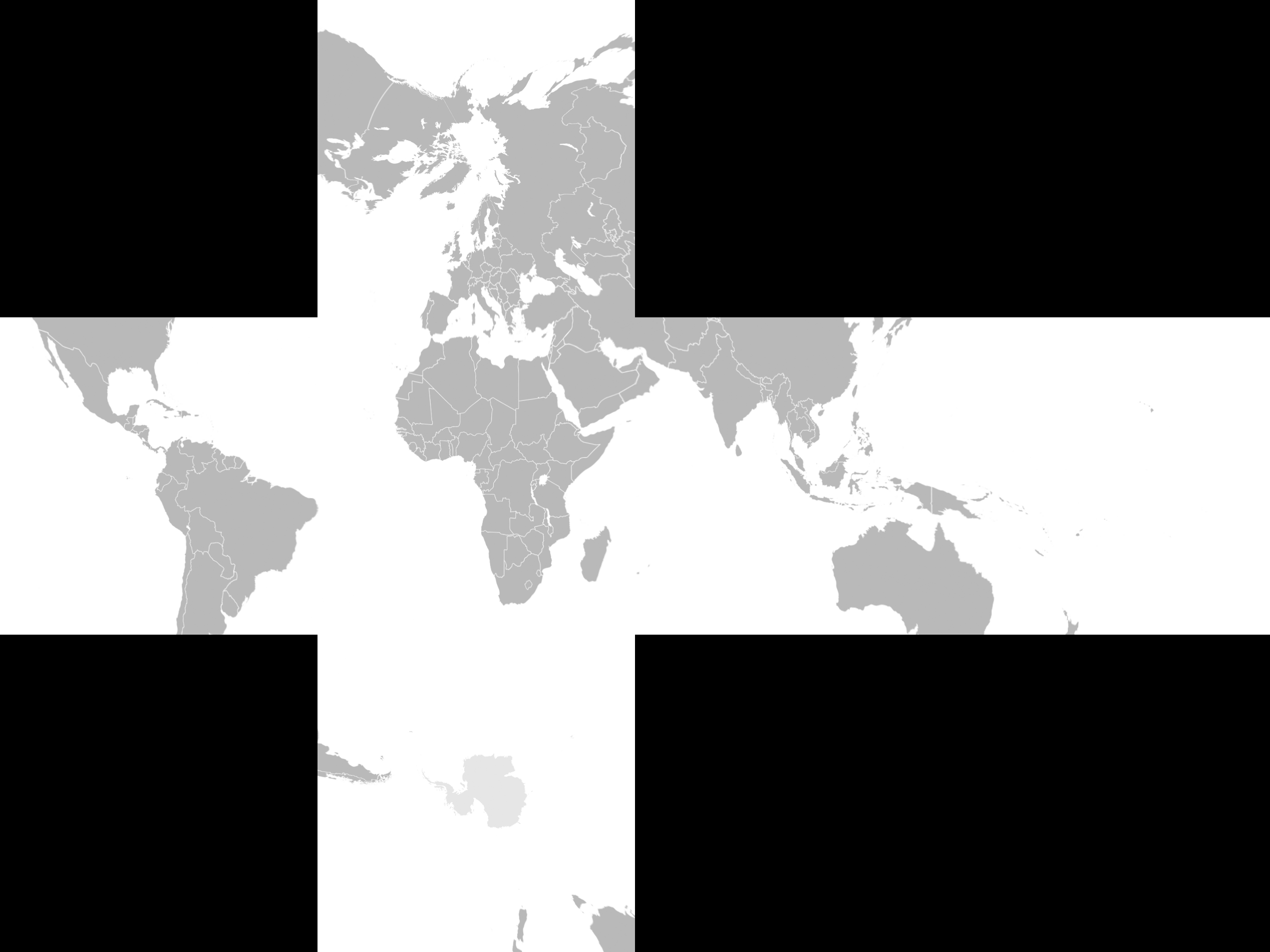
- Cubemap 'dice' format
🔧 Requirements
- Python 3.7+
- PyTorch
📦 Installation
You can easily install the library using pip:
pip install pytorch360convert
Or you can install it from source like this:
pip install torch
Then clone the repository:
git clone https://github.com/ProGamerGov/pytorch360convert.git
cd pytorch360convert
pip install .
🚀 Key Features
- Lossless conversion between image formats.
- Supports different cubemap input formats (horizon, list, stack, dict, dice).
- Configurable sampling modes (bilinear, nearest).
- Supports different dtypes (float16, float32, float64, bfloat16).
- CPU support.
- GPU acceleration.
- Differentiable transformations for deep learning pipelines.
- TorchScript (JIT) support.
💡 Usage Examples
Helper Functions
First we'll setup some helper functions:
pip install torchvision pillow
import torch
from torchvision.transforms import ToTensor, ToPILImage
from PIL import Image
def load_image_to_tensor(image_path: str) -> torch.Tensor:
"""Load an image as a PyTorch tensor."""
return ToTensor()(Image.open(image_path).convert('RGB'))
def save_tensor_as_image(tensor: torch.Tensor, save_path: str) -> None:
"""Save a PyTorch tensor as an image."""
ToPILImage()(tensor).save(save_path)
Equirectangular to Cubemap Conversion
Converting equirectangular images into cubemaps is easy. For simplicity, we'll use the 'dice' format, which places all cube faces into a single 4x3 grid image.
from pytorch360convert import e2c
# Load equirectangular image (3, 1376, 2752)
equi_image = load_image_to_tensor("examples/example_world_map_equirectangular.png")
face_w = equi_image.shape[2] // 4 # 2752 / 4 = 688
# Convert to cubemap (dice format)
cubemap = e2c(
equi_image, # CHW format
face_w=face_w, # Width of each cube face
mode='bilinear', # Sampling interpolation
cube_format='dice' # Output cubemap layout
)
# Save cubemap faces
save_tensor_as_image(cubemap, "dice_cubemap.jpg")
| Equirectangular Input | Cubemap 'Dice' Output |
|---|---|
 |
 |
| Cubemap 'Horizon' Output |
|---|
 |
Cubemap to Equirectangular Conversion
We can also convert cubemaps into equirectangular images, like so.
from pytorch360convert import c2e
# Load cubemap in 'dice' format
cubemap = load_image_to_tensor("dice_cubemap.jpg")
# Convert cubemap back to equirectangular
equirectangular = c2e(
cubemap, # Cubemap tensor(s)
mode='bilinear', # Sampling interpolation
cube_format='dice' # Input cubemap layout
)
save_tensor_as_image(equirectangular, "equirectangular.jpg")
Equirectangular to Perspective Projection
from pytorch360convert import e2p
# Load equirectangular input
equi_image = load_image_to_tensor("examples/example_world_map_equirectangular.png")
# Extract perspective view from equirectangular image
perspective_view = e2p(
equi_image, # Equirectangular image
fov_deg=(70, 60), # Horizontal and vertical FOV
h_deg=260, # Horizontal rotation
v_deg=50, # Vertical rotation
out_hw=(512, 768), # Output image dimensions
mode='bilinear' # Sampling interpolation
)
save_tensor_as_image(perspective_view, "perspective.jpg")
| Equirectangular Input | Perspective Output |
|---|---|
|
 |
Equirectangular to Equirectangular
from pytorch360convert import e2e
# Load equirectangular input
equi_image = load_image_to_tensor("examples/example_world_map_equirectangular.png")
# Rotate an equirectangular image around one more axes
rotated_equi = e2e(
equi_image, # Equirectangular image
h_deg=90.0, # Vertical rotation/shift
v_deg=200.0, # Horizontal rotation/shift
roll=45.0, # Clockwise/counter clockwise rotation
mode='bilinear' # Sampling interpolation
)
save_tensor_as_image(rotated_equi, "rotated.jpg")
| Equirectangular Input | Rotated Output |
|---|---|
|
 |
📚 Basic Functions
e2c(e_img, face_w=256, mode='bilinear', cube_format='dice')
Converts an equirectangular image to a cubemap projection.
-
Parameters:
e_img(torch.Tensor): Equirectangular CHW image tensor.face_w(int, optional): Cube face width. If set to None, then face_w will be calculated as<e_img_height> // 2. Default:None.mode(str, optional): Sampling interpolation mode. Options arebilinear,bicubic, andnearest. Default:bilinearcube_format(str, optional): The desired output cubemap format. Options aredict,list,horizon,stack, anddice. Default:dicestack(torch.Tensor): Stack of 6 faces, in the order of: ['Front', 'Right', 'Back', 'Left', 'Up', 'Down'].list(list of torch.Tensor): List of 6 faces, in the order of: ['Front', 'Right', 'Back', 'Left', 'Up', 'Down'].dict(dict of torch.Tensor): Dictionary with keys pointing to face tensors. Keys are: ['Front', 'Right', 'Back', 'Left', 'Up', 'Down'].dice(torch.Tensor): A cubemap in a 'dice' layout.horizon(torch.Tensor): A cubemap in a 'horizon' layout, a 1x6 grid in the order: ['Front', 'Right', 'Back', 'Left', 'Up', 'Down'].
channels_first(bool, optional): Input cubemap channel format (CHW or HWC). Defaults to the PyTorch CHW standard ofTrue.
-
Returns: Cubemap representation of the input image as a tensor, list of tensors, or dict or tensors.
c2e(cubemap, h, w, mode='bilinear', cube_format='dice')
Converts a cubemap projection to an equirectangular image.
-
Parameters:
cubemap(torch.Tensor, list of torch.Tensor, or dict of torch.Tensor): Cubemap image tensor, list of tensors, or dict of tensors. Note that tensors should be in the shape of:CHW, except for whencube_format = 'stack', in which case a batch dimension is present. Inputs should match the correspondingcube_format.h(int, optional): Output image height. If set to None,<cube_face_width> * 2will be used. Default:None.w(int, optional): Output image width. If set to None,<cube_face_width> * 4will be used. Default:None.mode(str, optional): Sampling interpolation mode. Options arebilinear,bicubic, andnearest. Default:bilinearcube_format(str, optional): Input cubemap format. Options aredict,list,horizon,stack, anddice. Default:dicestack(torch.Tensor): Stack of 6 faces, in the order of: ['Front', 'Right', 'Back', 'Left', 'Up', 'Down'].list(list of torch.Tensor): List of 6 faces, in the order of: ['Front', 'Right', 'Back', 'Left', 'Up', 'Down'].dict(dict of torch.Tensor): Dictionary with keys pointing to face tensors. Keys are expected to be: ['Front', 'Right', 'Back', 'Left', 'Up', 'Down'].dice(torch.Tensor): A cubemap in a 'dice' layout.horizon(torch.Tensor): A cubemap in a 'horizon' layout, a 1x6 grid in the order of: ['Front', 'Right', 'Back', 'Left', 'Up', 'Down'].
channels_first(bool, optional): Input cubemap channel format (CHW or HWC). Defaults to the PyTorch CHW standard ofTrue.
-
Returns: Equirectangular projection of the input cubemap as a tensor.
e2p(e_img, fov_deg, h_deg, v_deg, out_hw, in_rot_deg=0, mode='bilinear')
Extracts a perspective view from an equirectangular image.
-
Parameters:
e_img(torch.Tensor): Equirectangular CHW or NCHW image tensor.fov_deg(float or tuple of float): Field of view in degrees. If a single value is provided, it will be used for both horizontal and vertical degrees. If using a tuple, values are expected to be in following format: (h_fov_deg, v_fov_deg).h_deg(float, optional): Horizontal viewing angle in range [-pi, pi]. (-Left/+Right). Default:0.0v_deg(float, optional): Vertical viewing angle in range [-pi/2, pi/2]. (-Down/+Up). Default:0.0out_hw(float or tuple of float, optional): Output image dimensions in the shape of '(height, width)'. Default:(512, 512)in_rot_deg(float, optional): Inplane rotation angle. Default:0mode(str, optional): Sampling interpolation mode. Options arebilinear,bicubic, andnearest. Default:bilinearchannels_first(bool, optional): Input cubemap channel format (CHW or HWC). Defaults to the PyTorch CHW standard ofTrue.
-
Returns: Perspective view of the equirectangular image as a tensor.
e2e(e_img, h_deg, v_deg, roll=0, mode='bilinear')
Rotate an equirectangular image along one or more axes (roll, pitch, and yaw) to produce a horizontal shift, vertical shift, or to roll the image.
-
Parameters:
e_img(torch.Tensor): Equirectangular CHW or NCHW image tensor.roll(float, optional): Roll angle in degrees (-Counter_Clockwise/+Clockwise). Rotates the image along the x-axis. Default:0.0h_deg(float, optional): Yaw angle in degrees (-Left/+Right). Rotates the image along the z-axis to produce a horizontal shift. Default:0.0v_deg(float, optional): Pitch angle in degrees (-Down/+Up). Rotates the image along the y-axis to produce a vertical shift. Default:0.0mode(str, optional): Sampling interpolation mode. Options arebilinear,bicubic, andnearest. Default:bilinearchannels_first(bool, optional): Input cubemap channel format (CHW or HWC). Defaults to the PyTorch CHW standard ofTrue.
-
Returns: A modified equirectangular image tensor.
🤝 Contributing
Contributions are welcome! Please feel free to submit a Pull Request.
🔬 Citation
If you use this library in your research or project, please refer to the included CITATION.cff file or cite it as follows:
BibTeX
@misc{egan2024pytorch360convert,
title={PyTorch 360° Image Conversion Toolkit},
author={Egan, Ben},
year={2024},
publisher={GitHub},
howpublished={\url{https://github.com/ProGamerGov/pytorch360convert}}
}
APA Style
Egan, B. (2024). PyTorch 360° Image Conversion Toolkit [Computer software]. GitHub. https://github.com/ProGamerGov/pytorch360convert
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file pytorch360convert-0.2.3.tar.gz.
File metadata
- Download URL: pytorch360convert-0.2.3.tar.gz
- Upload date:
- Size: 28.5 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.1.0 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
f367e157ba184fe83117944849f4128d5adfeee70a483e262645098ad11d2956
|
|
| MD5 |
5b86d1cb48d5ea46a87fecdbdcb3ed85
|
|
| BLAKE2b-256 |
26a84a8e4c5b4d6e05dc9b4f21b89b7a6e259938a07dda3891859cc656b1848f
|
File details
Details for the file pytorch360convert-0.2.3-py3-none-any.whl.
File metadata
- Download URL: pytorch360convert-0.2.3-py3-none-any.whl
- Upload date:
- Size: 15.4 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/6.1.0 CPython/3.12.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
5d26ab9468884b2e4601dd2d8ffd2ed36b7454b70c67e852102961192073e9c6
|
|
| MD5 |
c9da3847d3ac6bccf14ca92958a18f26
|
|
| BLAKE2b-256 |
df61d69ddc9cf785ddfeaf59e8af26971c6924919045c98e0c54e13d91d61c6c
|







