CGAL's visibility polygons in Python

Project description
pyvispoly
This package provides a Python interface to the CGAL library for computing visibility polygons. It is exact, but not necessarily efficient.
Motivation: This package was developed in the context of implementing an exact solver for the dispersive Art Gallery Problem (see here). Because the problem is difficult and only reasonably small instances can be solved, the focus of this package is on correctness and not on efficiency.
Installation
You can install the package using pip:
pip install --verbose .
or directly via PyPI:
pip install --verbose pyvispoly
During installation, it will download and install CGAL and its dependencies. This may take a while. This requires a C++-compiler to be installed on your system.
:info: On installation problems, please first check out skbuild-conan's troubleshooting guide. It is likely that the automatic C++-compilation fails.
Addressing the Complexity of Visibility Polygon Computation
Computing visibility polygons demands precise arithmetic; imprecise calculations often yield incorrect results. This package leverages the robustness of the CGAL library for accurate visibility polygon computation. Note that it is essential to convert your coordinates to CGAL's exact number type. Failure to use the correct types may result in exceptions.
This package explicitly avoids duck typing and automatic type conversion. While these features could simplify usage, they risk obscuring underlying errors in your code. In geometric computations, precision is paramount; thus, Python's native floating-point numbers are unsuitable.
Usage
# import elements from pyvispoly
from pyvispoly import (
FieldNumber,
Point,
Polygon,
PolygonWithHoles,
VisibilityPolygonCalculator,
plot_polygon,
)
import matplotlib.pyplot as plt
# exact number type
a = FieldNumber(100)
b = FieldNumber(200)
c = a + b
assert isinstance(c, FieldNumber)
print("c:", c)
print("float(c):", float(c))
assert float(c) == 300.0
c: 300.000000
float(c): 300.0
# point type
p1 = Point(FieldNumber(0), FieldNumber(0))
assert p1.x() == FieldNumber(0) and p1.y() == FieldNumber(0)
p2 = Point(2, 3)
p3 = Point(4.0, 5.0)
print("p1:", p1)
print("p2:", p2)
print("p3:", p3)
p1: (0, 0)
p2: (2, 3)
p3: (4, 5)
# Polygon
poly1 = Polygon([Point(0, 0), Point(1, 0), Point(1, 1), Point(0, 1)])
assert poly1.is_simple()
assert poly1.area() == FieldNumber(1)
assert float(poly1.area()) == 1.0
# The ccw order of the points is important
poly1 = Polygon([Point(0, 0), Point(1, 0), Point(1, 1), Point(0, 1)][::-1])
assert poly1.is_simple()
assert poly1.area() == FieldNumber(-1)
assert float(poly1.area()) == -1.0
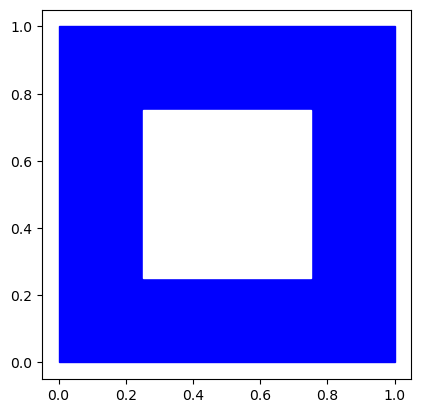
# Polygon with holes
poly2 = PolygonWithHoles(
[Point(0, 0), Point(1, 0), Point(1, 1), Point(0, 1)],
[
[Point(0.25, 0.25), Point(0.75, 0.25), Point(0.75, 0.75), Point(0.25, 0.75)][
::-1
]
],
)
# boundary is counter-clockwise
assert poly2.outer_boundary().area() >= FieldNumber(0)
for hole in poly2.holes():
# holes are clockwise
assert hole.area() <= FieldNumber(0)
fig, ax = plt.subplots()
ax.set_aspect("equal")
plot_polygon(poly2, ax=ax)
plt.show()
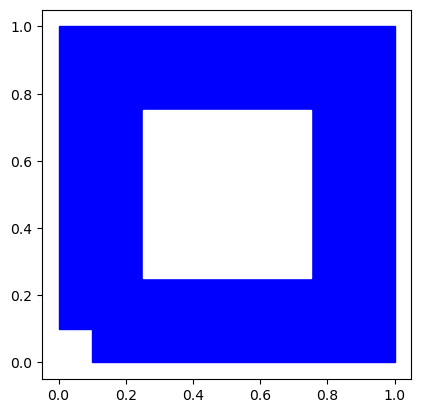
# set operations on polygons
poly3 = PolygonWithHoles([Point(0, 0), Point(0.1, 0), Point(0.1, 0.1), Point(0, 0.1)])
poly4_list = poly2.difference(poly3)
assert len(poly4_list) == 1, "Expect a single polygon"
poly4 = poly4_list[0]
fig, ax = plt.subplots()
ax.set_aspect("equal")
plot_polygon(poly4, ax=ax)
plt.show()
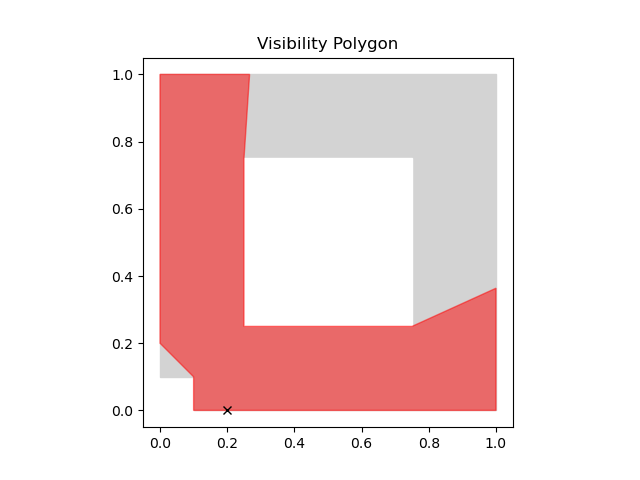
# compute visibility polygon
visp_poly_calc = VisibilityPolygonCalculator(poly4)
vis_poly = visp_poly_calc.compute_visibility_polygon(Point(0.2, 0.0))
fig, ax = plt.subplots()
ax.set_aspect("equal")
plt.title("Visibility Polygon")
plot_polygon(poly4, ax=ax, color="lightgrey")
plot_polygon(vis_poly, ax=ax, color="red", alpha=0.5)
plt.plot([0.2], [0.0], "x", color="black")
plt.savefig("../docs/figures/visibility_polygon.png")
plt.show()
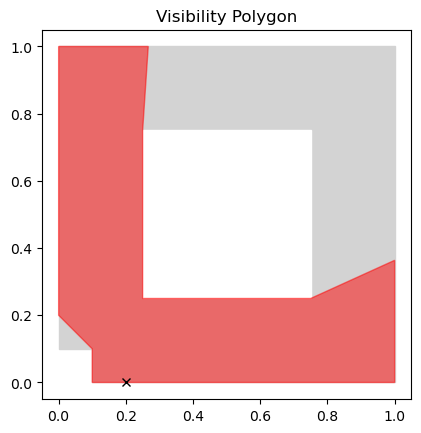
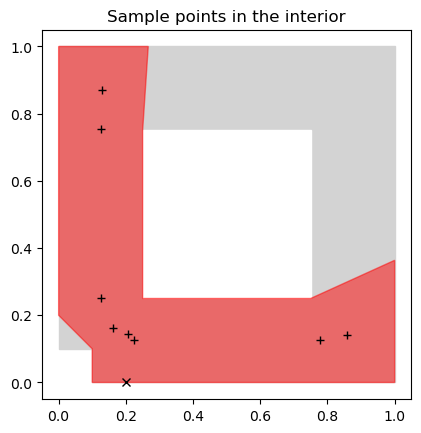
# getting some interior points
fig, ax = plt.subplots()
ax.set_aspect("equal")
plt.title("Sample points in the interior")
plot_polygon(poly4, ax=ax, color="lightgrey")
plot_polygon(vis_poly, ax=ax, color="red", alpha=0.5)
plt.plot([0.2], [0.0], "x", color="black")
interior_points = vis_poly.interior_sample_points()
for p in interior_points:
assert vis_poly.contains(p), "all points should be inside the visibility polygon"
plt.plot(
[p.x() for p in interior_points],
[p.y() for p in interior_points],
"+",
color="black",
)
plt.show()
:warning: The library may segfault if you pass bad polygons. For example, if holes intersect the outer boundary, the library may crash. One could probably catch these errors, but I have not implemented this yet (feel free to do so and submit a pull request).
License
This library incorporates components from the CGAL library through static linking, which are subject to the terms of the GNU General Public License (GPL). Consequently, the use and distribution of this library are also governed by the GPL.
However, if you possess a specialized (commercial) license for CGAL (or replace CGAL), then the portions of this library excluding the CGAL component are available under the more permissive MIT license, consistent with the licensing of my other code.
Please ensure you understand the implications of these licenses before using or distributing this library.
Changelog
- 0.3.1 Using CGAL6
- 0.3.0 Added
do_intersect. - 0.2.0 Made the library more robust and added a
repair-method as the boolean operations are not always guaranteed to produce valid polygons. Note that this is just kind of a hack and may not always work. - 0.1.3: (2023-11-29) Workaround to bug in CGAL.


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distributions
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file pyvispoly-0.3.1.tar.gz.
File metadata
- Download URL: pyvispoly-0.3.1.tar.gz
- Upload date:
- Size: 171.3 kB
- Tags: Source
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
f4684e739a4cc61d22e65de66dd61c939e795cca0ca8dc21e754c9304cc71a2e
|
|
| MD5 |
6e3942516265b9d6292f4f7f7140afd5
|
|
| BLAKE2b-256 |
1605e1e5178bf61c1b3ce08df4fcdd08c6449261e7482afdad5a884e8ded2f1b
|
Provenance
The following attestation bundles were made for pyvispoly-0.3.1.tar.gz:
Publisher:
publish.yml on d-krupke/pyvispoly
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pyvispoly-0.3.1.tar.gz -
Subject digest:
f4684e739a4cc61d22e65de66dd61c939e795cca0ca8dc21e754c9304cc71a2e - Sigstore transparency entry: 187214357
- Sigstore integration time:
-
Permalink:
d-krupke/pyvispoly@7eafa209f293935507e467da42e3b4fa0fd70874 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/d-krupke
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@7eafa209f293935507e467da42e3b4fa0fd70874 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file pyvispoly-0.3.1-cp313-cp313-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl.
File metadata
- Download URL: pyvispoly-0.3.1-cp313-cp313-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl
- Upload date:
- Size: 867.7 kB
- Tags: CPython 3.13, manylinux: glibc 2.27+ x86-64, manylinux: glibc 2.28+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
74d6f121d2c3cecfade5338f9e5e8b3183e2472dde5900ea41b900364a028c5b
|
|
| MD5 |
325b28ff467d3eff22044a397855d6e0
|
|
| BLAKE2b-256 |
37f5e0addc8455d1f5ee972c7292c57f2d97dfbae651233361b4bde6f7574df1
|
Provenance
The following attestation bundles were made for pyvispoly-0.3.1-cp313-cp313-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl:
Publisher:
publish.yml on d-krupke/pyvispoly
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pyvispoly-0.3.1-cp313-cp313-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl -
Subject digest:
74d6f121d2c3cecfade5338f9e5e8b3183e2472dde5900ea41b900364a028c5b - Sigstore transparency entry: 187214404
- Sigstore integration time:
-
Permalink:
d-krupke/pyvispoly@7eafa209f293935507e467da42e3b4fa0fd70874 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/d-krupke
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@7eafa209f293935507e467da42e3b4fa0fd70874 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file pyvispoly-0.3.1-cp313-cp313-manylinux_2_17_i686.manylinux2014_i686.whl.
File metadata
- Download URL: pyvispoly-0.3.1-cp313-cp313-manylinux_2_17_i686.manylinux2014_i686.whl
- Upload date:
- Size: 922.7 kB
- Tags: CPython 3.13, manylinux: glibc 2.17+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
66620744758de544e599e267a0b761f97121925789d5ee8f068484bdeabfaa86
|
|
| MD5 |
41fe4367b9c9fbb367b7e9f9de3fbc51
|
|
| BLAKE2b-256 |
a3da91a7d723b8beb8aa5fbfcc563e9da00e2362ff2da13e77dfa55d51e5a35f
|
Provenance
The following attestation bundles were made for pyvispoly-0.3.1-cp313-cp313-manylinux_2_17_i686.manylinux2014_i686.whl:
Publisher:
publish.yml on d-krupke/pyvispoly
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pyvispoly-0.3.1-cp313-cp313-manylinux2014_i686.manylinux_2_17_i686.whl -
Subject digest:
66620744758de544e599e267a0b761f97121925789d5ee8f068484bdeabfaa86 - Sigstore transparency entry: 187214363
- Sigstore integration time:
-
Permalink:
d-krupke/pyvispoly@7eafa209f293935507e467da42e3b4fa0fd70874 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/d-krupke
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@7eafa209f293935507e467da42e3b4fa0fd70874 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file pyvispoly-0.3.1-cp313-cp313-manylinux_2_17_aarch64.manylinux2014_aarch64.whl.
File metadata
- Download URL: pyvispoly-0.3.1-cp313-cp313-manylinux_2_17_aarch64.manylinux2014_aarch64.whl
- Upload date:
- Size: 832.6 kB
- Tags: CPython 3.13, manylinux: glibc 2.17+ ARM64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
4f94eb92003e84044a287b8a0b4a979e605f07fd709838039a698de70fae4dd4
|
|
| MD5 |
a5973041a238ab9c359ab5b3a904ef05
|
|
| BLAKE2b-256 |
f8114d63a74eee00d742c8aba78f804f47656c58515ea2846cf36d2bbf1f8dd3
|
Provenance
The following attestation bundles were made for pyvispoly-0.3.1-cp313-cp313-manylinux_2_17_aarch64.manylinux2014_aarch64.whl:
Publisher:
publish.yml on d-krupke/pyvispoly
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pyvispoly-0.3.1-cp313-cp313-manylinux2014_aarch64.manylinux_2_17_aarch64.whl -
Subject digest:
4f94eb92003e84044a287b8a0b4a979e605f07fd709838039a698de70fae4dd4 - Sigstore transparency entry: 187214381
- Sigstore integration time:
-
Permalink:
d-krupke/pyvispoly@7eafa209f293935507e467da42e3b4fa0fd70874 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/d-krupke
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@7eafa209f293935507e467da42e3b4fa0fd70874 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file pyvispoly-0.3.1-cp312-cp312-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl.
File metadata
- Download URL: pyvispoly-0.3.1-cp312-cp312-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl
- Upload date:
- Size: 867.7 kB
- Tags: CPython 3.12, manylinux: glibc 2.27+ x86-64, manylinux: glibc 2.28+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d2f1a3106ec5e6cc721b0bdda46b62864660410cbd56ccc3bd6ebda2e8ff1394
|
|
| MD5 |
bcb1006f9cc19e860d8af15a3f27629e
|
|
| BLAKE2b-256 |
245c098ce949e6687b8e9071c239abea4f74a17f49d33c41cc399a05a08a3961
|
Provenance
The following attestation bundles were made for pyvispoly-0.3.1-cp312-cp312-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl:
Publisher:
publish.yml on d-krupke/pyvispoly
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pyvispoly-0.3.1-cp312-cp312-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl -
Subject digest:
d2f1a3106ec5e6cc721b0bdda46b62864660410cbd56ccc3bd6ebda2e8ff1394 - Sigstore transparency entry: 187214369
- Sigstore integration time:
-
Permalink:
d-krupke/pyvispoly@7eafa209f293935507e467da42e3b4fa0fd70874 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/d-krupke
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@7eafa209f293935507e467da42e3b4fa0fd70874 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file pyvispoly-0.3.1-cp312-cp312-manylinux_2_17_i686.manylinux2014_i686.whl.
File metadata
- Download URL: pyvispoly-0.3.1-cp312-cp312-manylinux_2_17_i686.manylinux2014_i686.whl
- Upload date:
- Size: 922.7 kB
- Tags: CPython 3.12, manylinux: glibc 2.17+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
165ab439b1648669891036b3fa0c46d8f13c43705e456ec82dad3f7081d323b7
|
|
| MD5 |
05c256c734e40da325f66db626fc9381
|
|
| BLAKE2b-256 |
60719e78fcaaf1fdf73ee8ed4c96ee9bb85a0178c25b6e43df557e000d102d76
|
Provenance
The following attestation bundles were made for pyvispoly-0.3.1-cp312-cp312-manylinux_2_17_i686.manylinux2014_i686.whl:
Publisher:
publish.yml on d-krupke/pyvispoly
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pyvispoly-0.3.1-cp312-cp312-manylinux2014_i686.manylinux_2_17_i686.whl -
Subject digest:
165ab439b1648669891036b3fa0c46d8f13c43705e456ec82dad3f7081d323b7 - Sigstore transparency entry: 187214408
- Sigstore integration time:
-
Permalink:
d-krupke/pyvispoly@7eafa209f293935507e467da42e3b4fa0fd70874 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/d-krupke
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@7eafa209f293935507e467da42e3b4fa0fd70874 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file pyvispoly-0.3.1-cp312-cp312-manylinux_2_17_aarch64.manylinux2014_aarch64.whl.
File metadata
- Download URL: pyvispoly-0.3.1-cp312-cp312-manylinux_2_17_aarch64.manylinux2014_aarch64.whl
- Upload date:
- Size: 832.5 kB
- Tags: CPython 3.12, manylinux: glibc 2.17+ ARM64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
bc6332332c4045cc35fbf033956504733671dbe8c9a857da29266df7debd0f8e
|
|
| MD5 |
63b406422e14a020b0479b5f530f1c37
|
|
| BLAKE2b-256 |
4ebd47e2de4e65265042a1a0ee343c1a36d575673e5a8f56d6625c19ff9436f9
|
Provenance
The following attestation bundles were made for pyvispoly-0.3.1-cp312-cp312-manylinux_2_17_aarch64.manylinux2014_aarch64.whl:
Publisher:
publish.yml on d-krupke/pyvispoly
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pyvispoly-0.3.1-cp312-cp312-manylinux2014_aarch64.manylinux_2_17_aarch64.whl -
Subject digest:
bc6332332c4045cc35fbf033956504733671dbe8c9a857da29266df7debd0f8e - Sigstore transparency entry: 187214388
- Sigstore integration time:
-
Permalink:
d-krupke/pyvispoly@7eafa209f293935507e467da42e3b4fa0fd70874 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/d-krupke
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@7eafa209f293935507e467da42e3b4fa0fd70874 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file pyvispoly-0.3.1-cp311-cp311-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl.
File metadata
- Download URL: pyvispoly-0.3.1-cp311-cp311-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl
- Upload date:
- Size: 868.1 kB
- Tags: CPython 3.11, manylinux: glibc 2.27+ x86-64, manylinux: glibc 2.28+ x86-64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
e51b8559523e4ef3d96fd605ba2cca842c3f62e2810723f9ab0100119a11b28e
|
|
| MD5 |
f3f8478f234e3017e902ab0b70c11fd9
|
|
| BLAKE2b-256 |
58f6892e074911c60e9d04c774b1a61f6d967c9f36b30cdf6645d3e2d3c86623
|
Provenance
The following attestation bundles were made for pyvispoly-0.3.1-cp311-cp311-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl:
Publisher:
publish.yml on d-krupke/pyvispoly
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pyvispoly-0.3.1-cp311-cp311-manylinux_2_27_x86_64.manylinux_2_28_x86_64.whl -
Subject digest:
e51b8559523e4ef3d96fd605ba2cca842c3f62e2810723f9ab0100119a11b28e - Sigstore transparency entry: 187214391
- Sigstore integration time:
-
Permalink:
d-krupke/pyvispoly@7eafa209f293935507e467da42e3b4fa0fd70874 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/d-krupke
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@7eafa209f293935507e467da42e3b4fa0fd70874 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file pyvispoly-0.3.1-cp311-cp311-manylinux_2_17_i686.manylinux2014_i686.whl.
File metadata
- Download URL: pyvispoly-0.3.1-cp311-cp311-manylinux_2_17_i686.manylinux2014_i686.whl
- Upload date:
- Size: 923.4 kB
- Tags: CPython 3.11, manylinux: glibc 2.17+ i686
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
072e915a00686c5fba82d20c78e3825fff99c87ac1f96824693b82ee01c7be0c
|
|
| MD5 |
481900dcecaa2e182e308439dffac0b3
|
|
| BLAKE2b-256 |
b1dc2e05cc9114b3ae165de35df8606a82e5cf925356dcfaf31b75f1636c3d45
|
Provenance
The following attestation bundles were made for pyvispoly-0.3.1-cp311-cp311-manylinux_2_17_i686.manylinux2014_i686.whl:
Publisher:
publish.yml on d-krupke/pyvispoly
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pyvispoly-0.3.1-cp311-cp311-manylinux2014_i686.manylinux_2_17_i686.whl -
Subject digest:
072e915a00686c5fba82d20c78e3825fff99c87ac1f96824693b82ee01c7be0c - Sigstore transparency entry: 187214373
- Sigstore integration time:
-
Permalink:
d-krupke/pyvispoly@7eafa209f293935507e467da42e3b4fa0fd70874 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/d-krupke
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@7eafa209f293935507e467da42e3b4fa0fd70874 -
Trigger Event:
workflow_dispatch
-
Statement type:
File details
Details for the file pyvispoly-0.3.1-cp311-cp311-manylinux_2_17_aarch64.manylinux2014_aarch64.whl.
File metadata
- Download URL: pyvispoly-0.3.1-cp311-cp311-manylinux_2_17_aarch64.manylinux2014_aarch64.whl
- Upload date:
- Size: 832.7 kB
- Tags: CPython 3.11, manylinux: glibc 2.17+ ARM64
- Uploaded using Trusted Publishing? Yes
- Uploaded via: twine/6.1.0 CPython/3.12.9
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
e748bb6dd31faf5893f950aa70626fcb40f6e61db5451cc3f6a2fe71387b0730
|
|
| MD5 |
4d2f3ae5a9d8e3aa573c7d42c37295b3
|
|
| BLAKE2b-256 |
d2aaace30204d97b63fbf6f96ca39656b42537486c545b9ec20286efa1baee19
|
Provenance
The following attestation bundles were made for pyvispoly-0.3.1-cp311-cp311-manylinux_2_17_aarch64.manylinux2014_aarch64.whl:
Publisher:
publish.yml on d-krupke/pyvispoly
-
Statement:
-
Statement type:
https://in-toto.io/Statement/v1 -
Predicate type:
https://docs.pypi.org/attestations/publish/v1 -
Subject name:
pyvispoly-0.3.1-cp311-cp311-manylinux2014_aarch64.manylinux_2_17_aarch64.whl -
Subject digest:
e748bb6dd31faf5893f950aa70626fcb40f6e61db5451cc3f6a2fe71387b0730 - Sigstore transparency entry: 187214400
- Sigstore integration time:
-
Permalink:
d-krupke/pyvispoly@7eafa209f293935507e467da42e3b4fa0fd70874 -
Branch / Tag:
refs/heads/main - Owner: https://github.com/d-krupke
-
Access:
public
-
Token Issuer:
https://token.actions.githubusercontent.com -
Runner Environment:
github-hosted -
Publication workflow:
publish.yml@7eafa209f293935507e467da42e3b4fa0fd70874 -
Trigger Event:
workflow_dispatch
-
Statement type:







