An open source framework for deep learning on satellite and aerial imagery


Project description






Raster Vision is an open source Python library and framework for building computer vision models on satellite, aerial, and other large imagery sets (including oblique drone imagery).
It has built-in support for chip classification, object detection, and semantic segmentation with backends using PyTorch.

As a library, Raster Vision provides a full suite of utilities for dealing with all aspects of a geospatial deep learning workflow: reading geo-referenced data, training models, making predictions, and writing out predictions in geo-referenced formats.
As a low-code framework, Raster Vision allows users (who don't need to be experts in deep learning!) to quickly and repeatably configure experiments that execute a machine learning pipeline including: analyzing training data, creating training chips, training models, creating predictions, evaluating models, and bundling the model files and configuration for easy deployment.
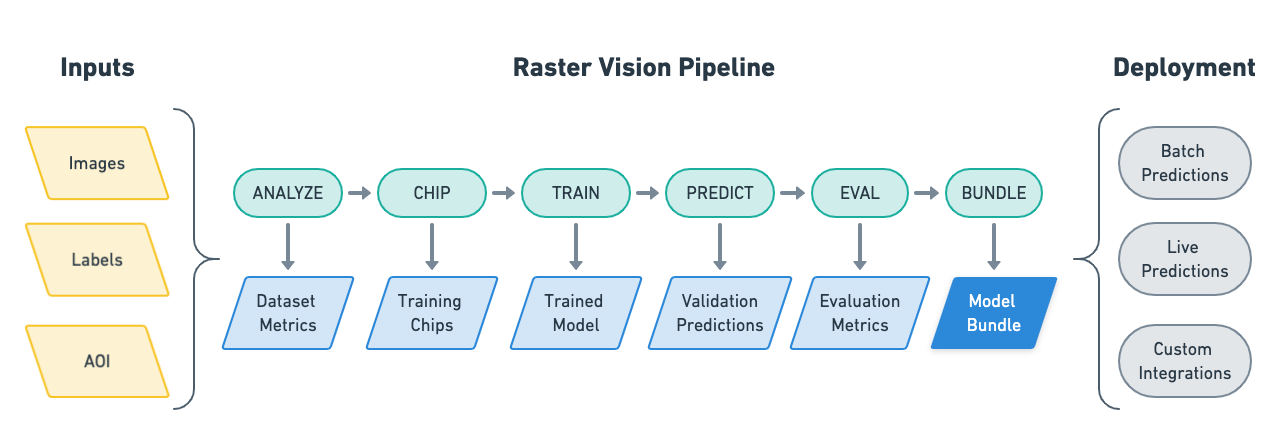
Raster Vision also has built-in support for running experiments in the cloud using AWS Batch as well as AWS Sagemaker.
See the documentation for more details.
Installation
For more details, see the Setup documentation.
Install via pip
You can install Raster Vision directly via pip.
pip install rastervision
Use Pre-built Docker Image
Alternatively, you may use a Docker image. Docker images are published to quay.io (see the tags tab).
We publish a new tag per merge into master, which is tagged with the first 7 characters of the commit hash. To use the latest version, pull the latest suffix, e.g. raster-vision:pytorch-latest. Git tags are also published, with the Github tag name as the Docker tag suffix.
Build Docker Image
You can also build a Docker image from scratch yourself. After cloning this repo, run docker/build, and run then the container using docker/run.
Usage Examples and Tutorials
Non-developers may find it easiest to use Raster Vision as a low-code framework where Raster Vision handles all the complexities and the user only has to configure a few parameters. The Quickstart guide is a good entry-point into this. More advanced examples can be found on the Examples page.
For developers and those looking to dive deeper or combine Raster Vision with their own code, the best starting point is Usage Overview, followed by Basic Concepts and Tutorials.
Contact and Support
You can ask questions and talk to developers (let us know what you're working on!) at:
Contributing
For more information, see Contributing.
We are happy to take contributions! It is best to get in touch with the maintainers about larger features or design changes before starting the work, as it will make the process of accepting changes smoother.
Everyone who contributes code to Raster Vision will be asked to sign a Contributor License Agreement. See Contributing for instructions.
Licenses
Raster Vision is licensed under the Apache 2 license. See license here.
3rd party licenses for all dependecies used by Raster Vision can be found here.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file rastervision-0.31.1.tar.gz.
File metadata
- Download URL: rastervision-0.31.1.tar.gz
- Upload date:
- Size: 4.5 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.1.1 CPython/3.11.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
83f81b6ee53b5bfc33b17a1a1d291f08488fc02a244fa5562fda1f3426b75df1
|
|
| MD5 |
1697fbdc77e7364cfae78c47d175a4ef
|
|
| BLAKE2b-256 |
4ad73e59702dc9f38d4f9d80ae30b88d35b36a932f547108d0ce7d03d683c903
|
File details
Details for the file rastervision-0.31.1-py3-none-any.whl.
File metadata
- Download URL: rastervision-0.31.1-py3-none-any.whl
- Upload date:
- Size: 3.9 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: twine/5.1.1 CPython/3.11.8
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
dc9296d12b41342697b5ae08409e27e836934db93cb2c2dd3981d5b8a43ca3f5
|
|
| MD5 |
067a97dbfd857be86c99502eaddd75cd
|
|
| BLAKE2b-256 |
aaf8aa0433044ae5c8d63f0079fcf3d051c0fe585f72a06d10bc842083ca061a
|







