Inverse kinematics module for biomechanical models



Project description






🪰 Overview
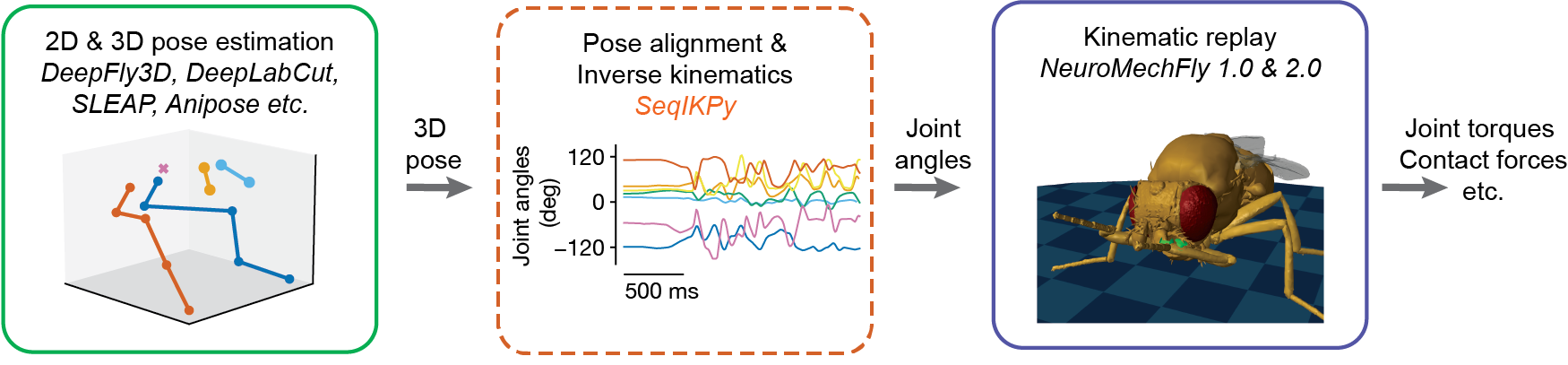
SeqIKPy is a Python package that provides an implementation of inverse kinematics (IK) that is based on the open-source Python package IKPy. In constrast to the current IK approaches that aims to match only the end-effector, SeqIKPy is designed to calculate the joint angles of the fly body parts to align the 3D pose of the entire kinematic chain to a desired 3D pose. In particular, you can use SeqIKPy in the pipeline shown below.
📐 Features
- Pose alignment: Align of 3D pose data to a fly biomechanical model, e.g., NeuroMechFly.
- Leg inverse kinematics: Calculate leg joint angles using sequential inverse kinematics.
- Head inverse kinematics: Calculate head and antenna joint angles using the vector dot product method.
- Visualization and animation: Visualize and animate the results in 3D.
🗂️ Summary of directories
.
├── data: Folder containing the sample data.
├── docs: Documentation for the website.
├── examples: Examples and tutorials on how to use the package.
├── seqikpy: Main package.
└── tests: Tests for the package.
📚 Documentation
Documentation can be found here.
🛠️ Installation
If you aim to purely use SeqIKPy as a dependency for your project, you can install the newest version of the package manually by running the following line in the terminal:
# Optionally create/activate a virtual environment first. Then,
$ pip install seqikpy
If you plan to follow the tutorial or help develop SeqIKPy, you should download the data/ directory, which contains sample data for demonstration and testing. In this case, you should clone this GitHub repository and installing it locally instead of downloading it from PyPI:
# Optionally create/activate a virtual environment first. Then,
$ git clone git@github.com:NeLy-EPFL/sequential-inverse-kinematics.git
# ... or with HTTP: git clone https://github.com/NeLy-EPFL/sequential-inverse-kinematics.git
$ cd sequential-inverse-kinematics/
# Install the package locally (development mode)
$ pip install -e ".[dev]" --config-settings editable_mode=compat
# ... where editable_mode=compat helps static code analyzers in IDEs parse your code better
# Alternatively, use uv for faster dependency resolution (`pip install uv` first)
$ uv pip install -e ".[dev]"
🏁 Quick Start
Please see the quick start guide here.
💻 Contributing
We welcome contributions from the community. If you would like to contribute to the project, please refer to the contribution guidelines. Also, read our code of conduct. If you have any questions, please feel free to open an issue or contact the developers.
📖 License
This project is licensed under the Apache 2.0 License.
🐞 Issues
If you encounter any bugs or request a new feature, please open an issue in our issues page.
💬 Citing
If you find this package useful in your research, please consider citing it using the following BibTeX entry:
@article{ozdil2026seqikpy,
title={SeqIKPy: a Python package for inverse kinematics in insects},
author={{\"O}zdil, Pembe Gizem and Wang-Chen, Sibo and Ning, Chuanfang and Ijspeert, Auke and Ramdya, Pavan},
journal={Journal of Open Source Software},
volume={11},
number={117},
pages={8557},
year={2026}
}
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Filter files by name, interpreter, ABI, and platform.
If you're not sure about the file name format, learn more about wheel file names.
Copy a direct link to the current filters
File details
Details for the file seqikpy-1.1.0.tar.gz.
File metadata
- Download URL: seqikpy-1.1.0.tar.gz
- Upload date:
- Size: 49.1 kB
- Tags: Source
- Uploaded using Trusted Publishing? No
- Uploaded via: uv/0.9.21 {"installer":{"name":"uv","version":"0.9.21","subcommand":["publish"]},"python":null,"implementation":{"name":null,"version":null},"distro":{"name":"Ubuntu","version":"24.04","id":"noble","libc":null},"system":{"name":null,"release":null},"cpu":null,"openssl_version":null,"setuptools_version":null,"rustc_version":null,"ci":null}
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
d0e7e4a681679b329c7e757b380c35e8827fa66eaa1294cf57a5c9bff41355db
|
|
| MD5 |
a63db450d7339f267fc68fa0a3be4fcc
|
|
| BLAKE2b-256 |
ef33d4e35e5c799961ac630b15dcfd40cc9e59d67e23ff0fe2e8c82744275cc9
|
File details
Details for the file seqikpy-1.1.0-py3-none-any.whl.
File metadata
- Download URL: seqikpy-1.1.0-py3-none-any.whl
- Upload date:
- Size: 41.8 kB
- Tags: Python 3
- Uploaded using Trusted Publishing? No
- Uploaded via: uv/0.9.21 {"installer":{"name":"uv","version":"0.9.21","subcommand":["publish"]},"python":null,"implementation":{"name":null,"version":null},"distro":{"name":"Ubuntu","version":"24.04","id":"noble","libc":null},"system":{"name":null,"release":null},"cpu":null,"openssl_version":null,"setuptools_version":null,"rustc_version":null,"ci":null}
File hashes
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 |
5a42c2f874f64dcae26c06f6b8328061f6c04b686f3473ab7e16dfa93eec0849
|
|
| MD5 |
a0f8c488f41fb26fd19775eaf1df2adc
|
|
| BLAKE2b-256 |
e037f1e0426a33c7e361509752614297554d1e687aebe69128a7a1d394b17c93
|







